基于SURF特征点的包装空间双目视觉定位研究
2022-05-23 14:59:24祁晓玲
包装与食品机械 2022年2期
祁晓玲
(山西铁道职业技术学院,太原 030024)
0 引言
复杂环境下的目标包装物有效识别研究对于社会工业生产、环保以及物流领域均有非常重要的意义。多自由度的机械臂以其多元化功能被广泛应用于各个领域[1]。复杂环境下的目标包装物有效识别是机械臂精确定位作业的基础,传统的视觉定位通常采取单眼机器视觉的方式[2],在识别效果上的精度较差,并且对于复杂环境的特征提取具有较大的局限性。环保垃圾捡拾机械臂所作业的环境更为复杂,对计算机机器视觉的技术应用提出更高的要求,包装定位的机器视觉需求也更高[3]。机器视觉系统构建包括:机械与控制系统、精密光学相机和系列化视觉标定算法等多个方面[4]。
SURF全称为加速鲁棒特征,基于SIFT衍生而来,SURF相较于SIFT可以更快进行算法计算,并且在图像平移、亮度变化以及尺寸凸显等方面较大程度地提高运算效率与稳定。本文基于针孔成像原理,通过双目相机标定的方法,以复杂环境下的目标包装物的视觉定位检测过程为研究对象,分析归纳包装过程难点,通过利用高精准的SURF局部特征点的定位与提取,整理出1套具有科学性的复杂环境下的双目视觉定位技术。相较于单眼识别定位方法,降低空间识别误差,为智能识别复杂空间中的包装系统构建提供支持。
1 双目视觉系统建模分析
1.1 针孔成像模型
针孔成像模型建模的核心作用是将三维空间模型转化为二维图像,模拟人眼将三维模型中的空间坐标映射成为二维图像坐标[5]。模型建立的坐标主要包括世界坐标系、相机坐标系、图像坐标系以及像素坐标系[6]。各类坐标系模型的位置关系如图1所示。世界坐标系的点P经小孔Oc投影形成图像坐标系,并经相机转化构建出图像像素坐标。

图1 针孔坐标系模型原理图Fig.1 Schematic diagram of pinhole coordinate system model
图中X与Y轴分别同相机CCD传感器定位轴平行,相机轴向同坐标系方向保持一致,U轴同X轴,V轴与Y轴分别保持平行。以CCD传感器的标注方向为向量方向,分别记物理向量为dX和dY,单位为米/像素。图像坐标系向像素坐标系转化的关系如式(1)所示。

相机坐标系与图像坐标系在针孔成像模型上进行架构,得到两坐标转换关系如式(2)所示,f为平面到小孔的距离,ω为深度距离。

世界坐标系与像素坐标系的转化关系如式(3)所示,R为旋转矩阵,t为平移向量。

1.2 双目相机标定
双目标定的基础是要明确相机内部参数与位置间的关系,而相机间的内部参数如式(4)所示,Sx为相机的偏斜系数。

双目视觉系统基于单眼设计的基础而建立[7],其关系如图2所示。

图2 双目视觉原理图Fig.2 Schematic diagram of binocular vision
双目视觉系统是2个相机在同1个世界坐标系下构建,以确定物体的位置,而未通过旋转矩阵与平移向量以实现图像的标定。
将外相机移动方向之间的夹角记作视角α,标识平行于地面方向的长度记作L,左相机距标
识平面的垂直距离记作u0。在相机进行图像拍摄时,相机距标识平面左边沿对应轴方向的最小距离wt需满足公式(5)。

2 SURF 局部特征提取研究
在整个复杂环境下目标包装物的定位中,首先对目标包装物进行精确有效地识别;随后在图像检测上,对特定的位置进行特征的精确抓取、标定[7];最后机械臂对目标包装加以抓取。对图像进行处理是视觉技术的基础,局部特征是对图像有效信息抓取的关键,SURF是局部特征抓取的主要方式,具有可重复性、可区别性以及识别性强的特征[8]。SURF在局部特征提取上包括特征点的选择与描述子2部分。
2.1 提取SURF 特征关键点
SURF特征提取的主要流程如图3所示[9]。首先通过终端设备对图像进行采集,实现图像素材的输入;然后在Hessian矩阵的转化下得到高斯图像,确定图像中包装物等杂物同环境背景的差异,标识关键点及其方向;最后明确SURF中的局部特征与特征方向,实现SURF特征图像的输出。

图3 SURF算法流程图Fig.3 Flow chart of SURF algorithm
对SURF局部特征的图像尺度,采取图像高斯金字塔的方式来对图像环境差异变化进行关键点的提取,而后进行滤波,得到平滑性图像。图像中的像素点x=(x,y),在x处的尺度关系,表示为Hessian矩阵如下式所示。

其中,Lxx(x,σ)为图像中x处的高斯二阶导数,Lxy(x,σ)为图像中x与y处分别求得的高斯二阶导数,Lyy(x,σ)为图像中y处的高斯二阶导数。SURF特征提取中精简了差分运算,进而可加快图像的计算效率。图像中的像素表达转化为数字表达,通过模板的方式转化,经Hessian矩阵卷积与平滑处理后,得到如图4所示的结果。

图4 图像积分模板Fig.4 Integral template of image
2.2 构造SURF特征描述子
在完成SURF特征描述的基础上,对图像周边提箱信息核心关键点加以提取,被称为图像特征的描述子。SURF 特征描述子处理的目的是在图像抓取过程中,对环境中的各类影响图像信息的干扰因素加以排除[10]。图像处理算法的核心步骤是先对图像进行像素的增强,在保证图像质量的基础上,再降低图像处理算法的复杂性。
在复杂环境下的目标包装物定位算法验证前,需对包装物体轮廓进行图像加强凸显,保证被标定边的特征可以被有效抓取[11]。保边滤波相较于传统的去SURF特征描述子方法可以将原先的边框加以平整化处理,将外轮廓有效地突出,对不同类型的边缘细节进行有效地平滑过渡,使其像素表现更为平整有效,明确不同物体边缘的保持状态。SURF 特征描述子结果标注前后图像如图5和图6所示。

图5 相机终端采集实景拍摄图Fig.5 Real scene snap of camera terminal acquisition

图6 SURF 特征描述子标注示意图Fig.6 Schematic diagram of SURF feature descriptor annotation
采取SURF特征描述子可以实现对目标的边缘进行有效地标注,使整体的图像显示较为模糊。通过SURF特征描述子可使得复杂环境下的目标包装物的边缘被有效地保留,而且对于目标包装的背景以及包装上相应的纹理加以平滑处理。
3 基于标识的双目视觉室内定位系统
在完成图像双目视觉标识定位的基础上,对复杂环境下的目标包装物进行精准化定位标定,具体过程:通过工业相机的拍摄对被标定物精确定位,明确复杂环境下的目标被抓取物的边框,并对图像中多余的边框部位加以及时地背景剔除,使得可以通过机械臂实现目标物的精确抓取[12]。
在目标包装物定位过程中,需明确目标包装物区域边角的坐标点,满足后续抓取机械对于精准定位参数的要求。结合现有的视觉算法,通过SURF特征进行图像边缘检测,如图7所示。
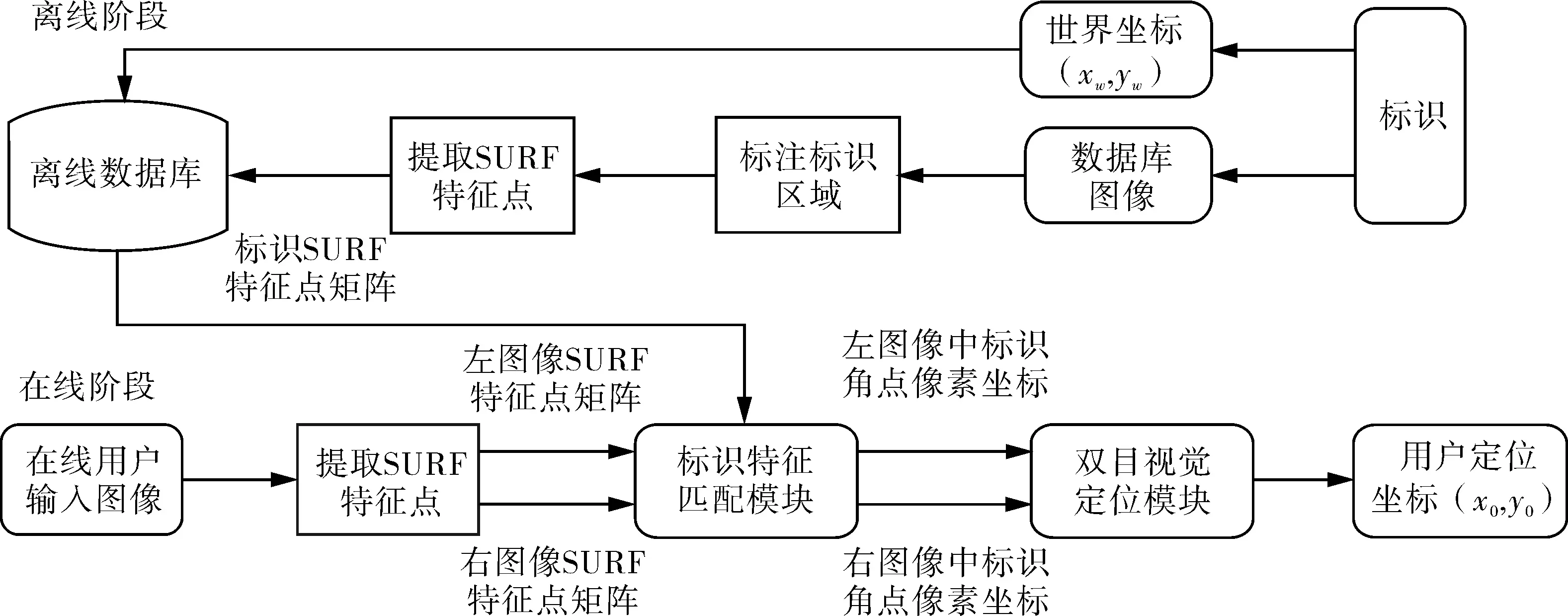
图7 双目视觉标定流程示意图Fig.7 Schematic diagram of flow chart of binocular vision calibration
结合项目实践经验可知,在目标包装物的定位算法中,利用SURF特征可以有效地将目标包装物的外轮廓加以定位,图像要素均可以被有效提取,在结合形态学以及处理后,系统中大部分冗余的噪声可以被有效地清除。复杂环境下的目标包装物定位算法的核心是对包装系统的纹理特征频段加以信息强化,使得外部边缘信息可以被有效地放大与加强,保证核心的大部分外纹理被显示出来。对采集后的外边轮廓进行数值标定;明确外边缘尺寸参数范围取值。采用SURF对照程序对原图与经双目视觉定位的图像比较,可实现对复杂环境下的目标包装物的外轮廓精确定位,达到预期设定的目标。
4 双目视觉定位算法结果分析
图像双目视觉标识定位在经过特征提取分析后,对目标包装物实现有效地标定,双目视觉标定在单目视觉标定上进行二重标定。结合目标包装物的标定点数量统计,对与实际世界坐标系下标定点误差在10%内的点数量进行统计,双目视觉标定与单目视觉标定的位置曲线如图8所示。

图8 单双目视觉标定点误差10%内的点数对照图Fig.8 Comparison of points within 10% error of binocular vision calibration points
双目视觉的特征点数量明显多于单目视觉。对图像中的SURF局部特征点进行强化,利用图像间的几何关系,定位效果更加有效。在像素坐标的确定上,基于标定包装物色块与周边环境的差异性进行像素坐标识别,最终转化为图像中的SURF局部特征点坐标,实现像素向标点计算机语言的转化。对单双目的横纵坐标定位误差值,即CDF值进行统计,结果如图9所示。
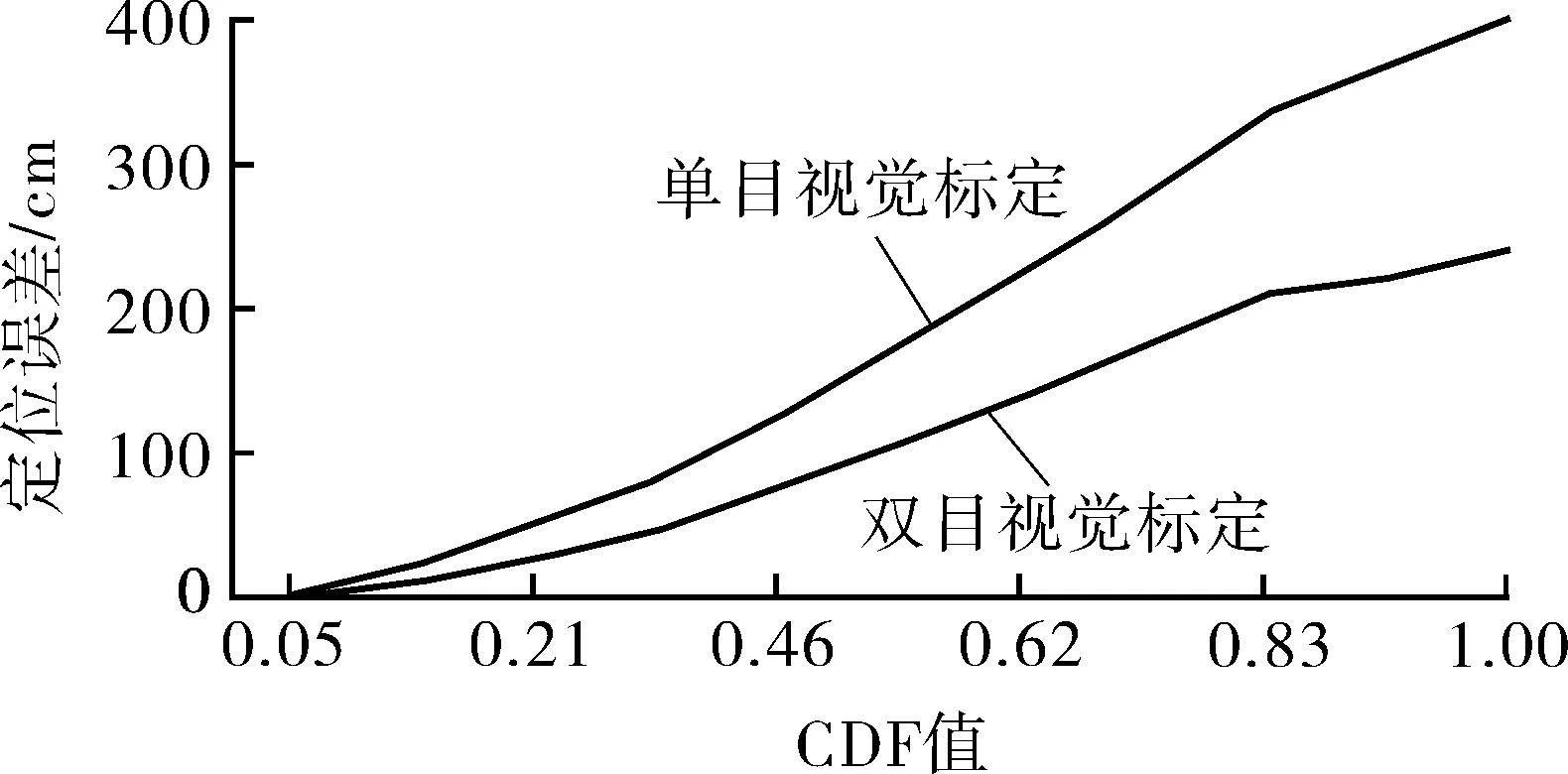
图9 单双目视觉标定点CDF统计对照图Fig.9 Statistical comparison diagram of CDF of binocular vision calibration points
采取双目视觉定位可以有效降低CDF误差定位的特征点数量,定位更加精准。SURF采集的图像坐标是在傅里叶变换的基础上,对图像频谱进行信号分解,技术优势在于强化包装边缘的像素差异检测,通过滤波计算将信号实现精准化提取,进而得到视觉中标定物的数据信息。
5 结语
随着智能化识别技术的不断发展,在复杂空间下的包装物识别已成为包装领域的研究热点。本文利用针孔成像的原理,通过双相机叠加进行SURF特征点的提取,经过SURF算法的特征点描述实现目标包装物定位,最终对包装的特征进行视觉处理,实现对包装物的像素坐标识别。通过对目标包装进行SURF的单双目视觉标定,结果表明,采取双目识别,可有效实现机器视觉对复杂环境下目标包装物的标定,较单目识别定位CDF值降低了约46%,识别定位更精准、有效。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:23:02
汽车维修与保养(2020年11期)2020-06-09 05:42:16
电子制作(2019年20期)2019-12-04 03:51:38
自动化学报(2017年4期)2017-06-15 20:28:54
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
国防科技大学学报(2016年6期)2017-01-07 06:44:55
光学精密工程(2016年3期)2016-11-07 09:03:34
现代计算机(2016年11期)2016-02-28 18:35:20
电测与仪表(2015年3期)2015-04-09 11:37:56
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38