
无人直升机传感器和执行器故障的类型与分析
2022-05-20 07:24:32陈传琪
无人机 2022年4期
陈传琪
中国直升机设计研究所
传感器和执行器的健康状况对无人直升机的飞行安全至关重要。本文对无人直升机传感器与执行器的故障进行分类与分析,并介绍执行器故障的定量描述方法。
无人直升机具有垂直起降、空中悬停、协调转弯、前飞等多种飞行模态。它能完成多种复杂任务,对起飞场地、使用环境要求较低。无人直升机行业的不断发展以及任务场景的广泛拓展,对无人直升机可靠性提出了更高要求。
作为无人直升机实现基本功能所必备的部件,传感器和执行器拥有良好的健康状况非常重要。传感器和执行器的功能和用途均不相同,二者可能发生的故障有很大差别,相应的故障诊断方法截然不同。
传感器作为不可控部件,其故障行为一般不可复原,须要配备冗余信号源避免信号丧失。执行器作为可控部件,其非破坏性故障可以被认为是执行机构操作效率的损失,适当的重构控制方法可降低故障引起的负面影响。在实际应用中,有必要对执行器的故障进行深入分析,以确定具体的故障信息。故障诊断环节得到的故障信息可以作为容错控制的基本依据。
传感器的分类
传感器作为一种检测装置,能够得到定量的测量信息,并按照一定规律将感知信息转成电信号或者其他形式的信号输出,以满足信息传输、处理、显示、控制等要求。传感器作为无人直升机飞行状况的监测装置,将测量信息反馈给控制系统,以便控制系统实时调控飞行状态,适应当前飞行需求。此外,传感器的输出信息也可为地面控制人员了解无人直升机的飞行状况提供重要参考。
根据工作原理,传感器分为物理传感器和化学传感器两大类。
在工程领域,物理传感器是一种应用较广泛的传感器,它感知弹性形变、压电效应、热电效应、光电效应等物理现象。比如,温度、压力等传感器大多基于物理效应设计而成。
化学传感器以化学吸附、电化学反应等现象为感知对象,能将具有微小变化量的测量信号转换成电信号。
传感器故障类型
作为一种功能性部件,传感器在工作过程中不可避免地发生老化、性能下降等问题,甚至受到外部环境的影响而发生突变性故障。
值得注意的是,传感器安装在无人直升机上,用于测量无人直升机的飞行参数。在飞行过程中,无人直升机机身的振动将对传感器测量值产生一定影响,这种影响具体表现为:测量值围绕真值上下波动。在实际工程应用中,这种波动被视为测量噪声。位置、高度等传感器因载体振动引起的测量误差非常小,可以忽略不计。加速度计、陀螺仪等惯性测量单元可采用滤波处理,尽量减小载体振动产生的影响。
根据故障存在的时间,传感器故障可分为间歇性故障和永久性故障。GPS的搜星故障是一种典型间歇性故障。传感器的机械零件、电子元器件等部件出现故障,通常会引起永久性故障。
而根据故障对测量结果产生的影响,传感器故障主要包括失效故障、偏移故障和周期噪声故障三种。下文详细分析这三种常见传感器故障。
失效故障
传感器失效故障是指,传感器受到环境干扰或因传感器自身原因而不能正常工作。一般情况下,失效故障的表现是,测量数值卡死或者归零。以无人直升机俯仰角测量为例进行故障分析,传感器若在某时刻发生归零故障,俯仰角测量值会持续归零,无法继续提供有效参数用于控制与显示。传感器若在某时刻发生卡死故障,俯仰角测量值将固定不变,且不能随无人直升机的姿态变化而提供有效参数用于控制与显示。常规手段即可实现传感器失效故障诊断,通常传感器自身标志位变化监测等手段可对故障进行判别。
偏移故障
传感器发生偏移故障后,仍能输出具有一定准确性的测量参数。偏移故障分为恒偏移故障、漂移故障(测量精度会下降)、冲激故障和恒增益故障。
(1)恒偏移故障
恒偏移故障是指,在某一时刻,传感器的测量值在真值的基础上,叠加了一个恒定偏移量。式(1)为恒偏移故障的数学解析式。

其中,f(t)是发生恒偏移故障的传感器的测量值,y(t)是传感器真值,Δ为一个恒定偏移量。
以无人直升机高度传感器为例进行故障分析,当传感器发生恒偏移故障时,其提供的高度参数出现一个恒定的偏移量Δ,飞行控制程序收到此错误偏移量后,调整无人直升机的飞行高度,这时无人直升机的飞行高度将与目标高度存在偏差,导致操作人员此做出错误判断。若偏移量超出本次飞行任务所要求的高度,可能导致飞行任务失败甚至发生危险。
(2)漂移故障
漂移故障是指,传感器在某一时刻发生故障后,测量值在真值的基础上,叠加一个与时间相关或者无关的漂移量。该漂移量一般随故障持续的时间增长而增加,故障表现为传感器精度逐渐下降,直至完全失真。式(2)为漂移故障的数学解析式。
其中,f(t)是发生漂移故障的传感器的测量值,y(t)是传感器真值,h(t)是传感器发生漂移故障后,其测量值所产生的偏移量,ρ(t)是一个与时间相关或无关的漂移量,t表示时间,t0是漂移故障发生的时刻。在所有传感器故障中,漂移故障发生的频率最高,传感器受到外界环境影响时,经常会发生漂移故障。
以无人直升机绝对位置信号(经纬度)为例进行故障分析,卫星接收机提供位置信号,当卫星接收机出现故障或卫星信号受到干扰时,搜星数量大大减少,甚至不能收到卫星信号,无人直升机的绝对位置信号将发生漂移,该绝对位置漂移量将随故障持续的时间增长逐渐增大,传感器的精度逐渐下降直至完全失真,无人直升机将无法准确到达任务目标位置或安全着陆点。
(3)冲激故障
冲激故障是指,传感器正常工作时,在某时刻受到影响而发生突变故障。该故障表现为,测量值叠加了一个幅值有限的冲激信号。式(3)为冲激故障的数学解析式。

其中,f(t)是发生冲激故障的传感器的测量值,y(t)是传感器真值,ρ(t0)为理想冲激函数。理想冲激函数表示在t0时刻存在一个宽度几乎为零且幅值无穷大的信号,在其他时刻,该函数值为零。
在实际工程中,冲激故障通常并不是一个理想冲激函数,而是一个持续时间较短、幅值有限的偏移故障。无人直升机一般来不及响应偶发的冲激故障,但过于频繁的冲激故障会对飞行控制产生不利影响,须要采用滤波算法等方法尽可能剔除冲激故障。传感器发生冲激故障后,能在一定程度上恢复正常的检测功能。但这种恢复不能保证传感器恢复到故障前的检测精度。相应的故障检测方法可检测传感器精度,并确定传感器能否满足实际应用所要求的功能。通常,专业人员对传感器进行校准,以检测传感器的具体状态。
(4)恒增益故障
当传感器发生恒增益故障时,传感器实际测量值发生一定比例的放大或缩小,传感器精度进而出现一定程度的下降。恒增益故障的数学解析式详见式(4)。

其中,f(t)是发生恒偏移故障的传感器的测量值,k为放大因子,y(t)是传感器真值。
恒增益故障通常由传感器敏感元件的老化、损坏等因素所致,尤其常见于弹簧管、膜盒等具有应力式原理的传感器。恒增益故障的表现与恒偏移故障类似,但二者的故障原理有着本质区别。恒增益故障一般由传感器的测量回路发生非破坏性故障所致,而恒偏移故障通常由传感器在某时刻发生类似零点漂移的偏移量所致。
周期噪声故障
周期噪声故障是指,传感器发生不定时的噪声过敏。该故障原因比较复杂,很难用具体数学表达式描述,故障机理一般不可测。周期噪声故障一般为破坏性故障,即传感器发生周期噪声故障后基本不可再用。
周期噪声故障表现为,测量值对噪声过于敏感。周期噪声故障也可以看作是传感器在不同时刻发生了多个冲激故障。在实际应用中,周期噪声故障一般由电子元器件老化、敏感器件失常等因素所致,会逐渐导致传感器功能完全失效。
执行器故障类型与分析
执行器的分类与功能
中小型油动无人直升机一般至少有4个电动舵机执行器,即1个尾桨舵机和3个主桨舵机。无人直升机飞行控制一般将以上4个执行器和4个伪控制量(尾桨距控制量、倾斜盘总距控制量、倾斜盘纵向周期变距控制量、倾斜盘横向周期变距控制量)相关联,4个电动舵机对无人直升机的运动进行控制。尾桨舵机的作用是控制尾桨距,进而改变尾桨旋转所产生的推力,3个主桨舵机共同操纵无人直升机主旋翼的总距用于控制飞行高度,单个主桨舵机操纵周期变距主要控制飞行方向。
联结主旋翼与机身的部件即为自动倾斜器。由图1可见,自动倾斜器由两个倾斜盘以及控制倾斜盘高度及倾斜角的3个执行器构成。两个倾斜盘之间可以相对滑动,但牢固结合在一起。3个舵机对下倾斜盘的运动进行控制,使下倾斜盘朝向给定的方向。上倾斜盘与主旋翼联结,随着下倾斜盘的调整,主旋翼旋转面将朝向给定的方向,从而控制无人直升机的运动。
电动舵机的组成
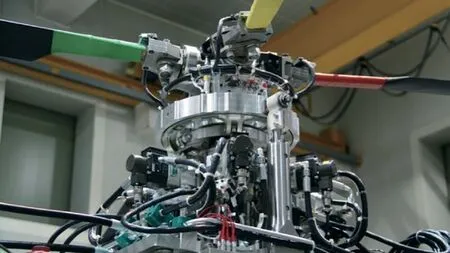
图1 自动倾斜器。
电动舵机主要由外壳、电路板、驱动电机、减速器与位置检测元器件构成。一个完整的电动舵机可以看作是一个完整的闭环控制回路。其工作原理是,计算模块向舵机发送信号,电路板上的集成电路驱动电机转动,减速齿轮再将动力传至摆臂,同时由位置检测器反馈摆臂位置至计算模块,计算模块判断摆臂是否已经到达目标位置。位置检测器实质上是一个滑动变阻器。随着舵机转动,变阻器电阻值也会相应变化,由此测得舵机转子转过的角度。
根据不同的工作方式,电动舵机分为直线舵机、旋转舵机等类型。直线舵机拥有更好的线性度,多用于须要直线驱动的场合,但直线舵机的安装条件相对严格。旋转舵机通过机械连杆实现直线驱动,且对安装空间的要求更低,其类型包括90°、150°和180°等不同行程的舵机。现阶段,无人直升机更多采用旋转舵机,无人直升机的执行器通常使用150°行程的舵机便能满足使用要求。
电动舵机采用电机提供动力,如果预算足够,舵机可使用无刷电机。舵机直接控制无人直升机的运动,3个主旋翼总距控制舵机和尾桨距控制舵机应具备更强的扭力以满足实际需求。

执行器故障分析
(1)舵机故障
舵机包括很多复杂的模块,这些模块都有发生故障的可能性。根据故障的表现形式,无人直升机机载执行器的故障可分为机械故障、电气故障两大类。机械故障主要指,无人直升机在调试以及运行期间,执行器的机械部件长期受力、热等因素作用而产生变形。电气故障则包含电源过载、蓄电池异常、电路断路和短路等现象。
功率放大模块是容易发生故障的模块之一。功率放大器的故障特征体现在电流和温度的变化。功率放大器产生的电流较大,晶体管的集电结消耗了相当大的功率输出,进而结温迅速上升,导致故障。
舵机老化则会引起滞舵现象。滞舵现象是指舵机转动滞后于操舵动作的现象,该现象时有发生。
(2)联动机构故障
除舵机之外,将舵机与主旋翼或尾桨联结在一起的机械构件也可能发生故障。常见的故障有联动机构卡滞、阻塞、松动以及存在间隙等问题,这些问题会导致执行器的操纵不能完全反映到飞行器的运动上,甚至失去操纵飞行器的能力。联动机构故障须要机务在日常检查与维护过程中预先发现并消除,同时在无人直升机每次起飞前都须要例行操纵检查以确定联动机构是否正常可靠。
执行器故障的定量描述方法
从故障对飞行状态的影响来看,无人直升机执行器的故障可分为软性故障和硬性故障。软性故障是指某部件发生故障后,仍能保留一部分功能,不会立即破坏无人直升机的动力学平衡。硬性故障是指执行器发生故障后,导致无人直升机不能工作。
式(5)是一种无人直升机故障的定量描述方法。

其中,

Uin是执行器的给定量,Uout是执行器实际输出量,γi是第i个执行器的效率损失因子,Γf为所有执行器的效率损失因子。
猜你喜欢
环球时报(2022-09-15)2022-09-15 19:18:27
小猕猴学习画刊(2022年12期)2022-02-06 03:00:42
自动化学报(2019年6期)2019-07-23 01:18:36
测控技术(2018年12期)2018-11-25 09:37:50
电子制作(2018年1期)2018-04-04 01:48:14
制造技术与机床(2017年9期)2017-11-27 02:13:45
制造业自动化(2017年2期)2017-03-20 14:26:08
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
舰船科学技术(2015年8期)2015-02-27 15:38:46
