
某型旋翼无人机极限风速下运动失稳及失能特性研究*
2022-05-19 09:11刘群杨昭周传霞
现代防御技术 2022年1期
刘群,杨昭,周传霞
(北京空间机电研究所,北京 100076)
0 引言
信息、控制、通讯等领域技术的不断发展成熟,使得无人机具有成本低、体积小、质量轻、易操纵、灵活性好、适应性强、稳定性高等优点[1-3],带动了无人机产业的整体飞速发展,促使消费级和工业级无人机的使用门槛逐渐降低,在民用及军事领域都得到了广泛应用[4-7]。无人机的飞行性能是评估无人机性能的关键,而无人机飞行运动是一个极其复杂的动力学过程,其运动特性易受高空风切变或大气紊流等因素干扰,导致无人机出现运动失稳甚至破坏等现象[8-10]。因此,抗风能力是决定无人机应用范围和生存能力的关键。以往研究中,一般通过数字模拟仿真或者室外有风测试评估无人机的抗风能力,测试精度不高,仅能粗略确定无人机的抗风等级区间,难以获得无人机临界失稳或失能条件[11-16]。本文利用风洞试验设备和双目视觉非接触式测量系统,对无人机极限风速下的失稳特性(姿态或速度)以及动力组件的失效特性开展精细化测量和研究,获得了某型旋翼无人机的临界失稳条件和特性以及易损部组件的失能特性,为无人机抗风性能评估提供了指导,并为未来战争反无人机研究提供了参考。
1 试验方法
1.1 试验对象
风洞试验所使用的无人机为某型号专业级无人机,外形如图1 所示,具体参数如表1 所示。

图1 无人机Fig.1 UAV
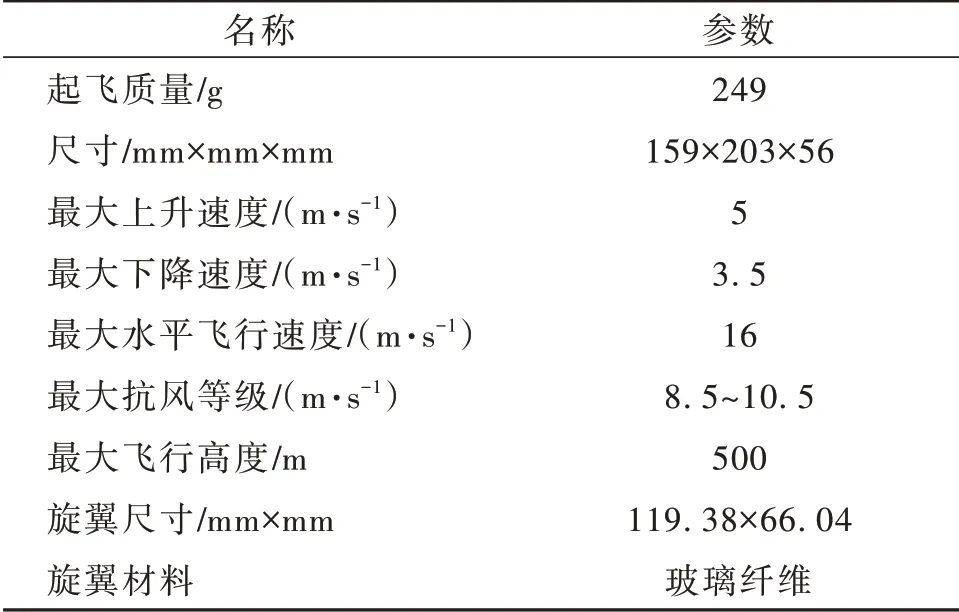
表1 无人机参数Table 1 Parameters of UAV
1.2 试验设备
运动失稳试验采用回流式低速边界层风洞,风洞宽3.0 m,高3.0 m,长15.0 m,风速在5~94 m/s范围内连续可调,湍流度小于0.3%,速度场不均性小于0.5%,气流偏角小于0.5°,动压稳定系数小于0.6%,轴向静压梯度小于0.000 5/m。试验时,将无人机置于风洞内处于悬停状态,在机身布置散斑(便于双目视觉系统采集数据),时刻对飞行状态进行影像拍摄,记录不同风速下无人机机身姿态变化和运动轨迹,获得无人机的运动特性数据,试验设备及测试场景,如图2 所示。

图2 运动失稳试验风洞设备及测试场景Fig.2 Wind tunnel equipment and test scenario for mo⁃tion instability test
动力部件失能试验采用直流低速风洞,试验段宽0.45 m,高0.45 m,长1.00 m,试验风速在0~34 m/s 范围内连续可调。试验时,将无人机旋翼用工装固定在小风洞内采用强风开展吹扫试验,旋翼翼面与来流垂直,通过风速传感器记录流场信息,利用影像设备量化记录旋翼的变形过程,获得不同风速下无人机旋翼的变形特征。将无人机整机固定在风洞中,无人机头尾连线与来流同向,启动无人机,使无人机旋翼处于高速转动状态,采用强风吹扫无人机,通过影像设备记录旋翼的转动变化,获得无人机动力系统变化特征。毁伤试验风洞设备及测试场景如图3 所示。

图3 动力部件失能试验风洞设备及测试场景Fig.3 Wind tunnel equipment and test scenario of disability test
1.3 测试方法
采用澳大利亚TFI 公司Cobra probe 风速探针确定瞬时的风速、倾角、偏角及静态压力。采用Phan⁃tom V1212 系列高速摄像机确定风场中无人机的位移、速度、加速度、姿态和变形情况,如图4 所示。试验前,通过规则散斑标定板,确定视场三维坐标系。试验时通过高速相机记录被测物体上不规则散斑在视场内图像。通过相邻两帧图像相关性分析,确定被测物体上不规则散斑的绝对位移和相对位移,从而计算出被测物体的位移、速度、加速度以及应变。

图4 测试仪器设备及样件Fig.4 Test equipment and samples
2 试验结果与讨论
2.1 运动失稳试验
风洞内风速分别设置为6,8,11,14,16,17,17.5,17.9 m/s,测试无人机在各种风速下的姿态变化和运动轨迹,试验结果如图5 所示。风速为6 m/s时,攻角为11.3°;8 m/s 时,攻角为16.6°;11 m/s 时,攻角为22.7°;14 m/s 时,攻角为32.4°;16 m/s 时,攻角为35.8°;17 m/s 时,攻角为40.9°;17.5 m/s 时,攻角为41.1°;17.9 m/s 时,攻角为41.0°。
图6是不同风速下无人机攻角变化曲线。由图6 可知,在17 m/s 之前,攻角随风速的增加而提高;在17 m/s 之后,风速提高,攻角不再变化。因此,在17 m/s 已经达到失稳临界状态。

图6 不同风速下无人机攻角变化Fig.6 Variation of UAV’s attack angle under different wind speeds
在17 m/s 时,无人机已经无法悬停在初始位置,发生顺风向的后移。图7 是17 m/s 风速下无人机位移曲线。由图7 可以看出,无人机基本以恒定速度向后移动,平均速度为0.35 m/s,最后,无人机挂在防护网上。
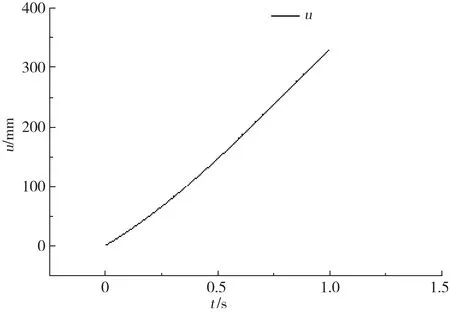
图7 17 m/s 风速下无人机后退位移曲线Fig.7 UAV backward displacement curve at 17m /s
2.2 动力部件失能试验
对无人机旋翼开展风洞吹扫试验,风速分别为28,34 m/s,旋翼通过工装固定在风洞中,旋翼翼面与来流方向垂直。通过相机记录不同风速下翼面状态,分析旋翼在各风速下的变形情况。图8 是不同风速下变形图。从图8 中可知,风速达到28 m/s时,无人机旋翼最大应变0.000 115;风速达到34 m/s时,无人机旋翼最大应变0.000 835。2 种工况下,无人机旋翼几乎不会发生变形。因此,在34 m/s 风速以下,风场对无人机旋翼无影响。
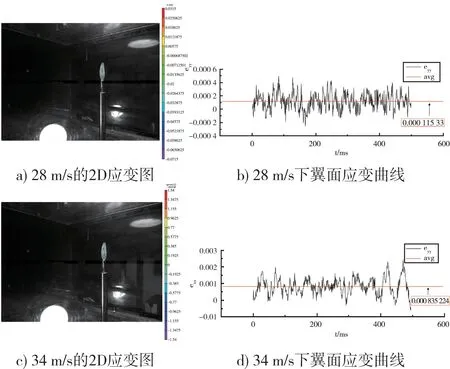
图8 不同风速下变形图和变形曲线Fig.8 Deformation graph and curve under different wind speed
对无人机动力系统开展风洞吹扫试验,将无人机通过工装固定在风洞内,启动无人机,使无人机旋翼正常转动,然后通过风洞吹扫无人机,直至无人机旋翼停机。在本试验(图9)中,当风速达到28 m/s 时,无人机后方2 个旋翼停止工作,处于停机状态。当风速达到34 m/s 时,全部旋翼处于停止状态。因此,在28 m/s 以上风速时,无人机动力系统停机,达到无人机动力系统失能效果。
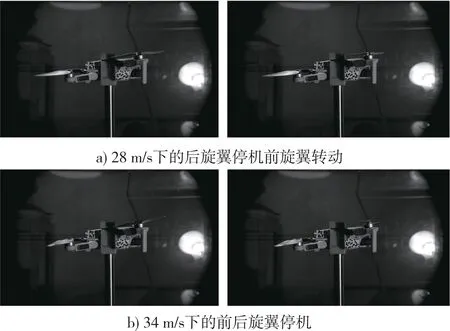
图9 动力系统试验图Fig.9 Power system test photo
3 结论
本文以某型旋翼无人机为对象,利用风洞和双目视觉测量设备,对无人机运动失稳特性和部组件毁伤特性开展了试验研究,主要结论如下:
(1)17 m/s 为无人机的临界失稳风速,达到极限风速时,无人机姿控攻角为40°左右,且以0.35 m/s速度后移。
(2)风速为34 m/s 下旋翼应变在0.001 以下,可以认为旋翼无毁伤。
(3)在风速达到28 m/s 时,无人机后旋翼停机,可以认为无人机动力系统失能。
因此,从风场角度破坏无人机,失稳坠落最容易,动力系统失能次之,旋翼破坏最为困难。
猜你喜欢
航空学报(2022年7期)2022-09-05
汽车工程学报(2022年3期)2022-06-10
直升机技术(2021年2期)2021-06-17
科技创新与应用(2020年10期)2020-04-24
环球飞行(2020年11期)2020-01-11
数学大王·中高年级(2018年11期)2018-12-17
现代农业科技(2018年11期)2018-08-14
吉林农业(2018年10期)2018-06-07
航空模型(2017年3期)2017-07-28
科学家(2016年3期)2016-12-30
