
基于两级模糊决策的网联车辆换道模型研究
2022-05-18 00:42马永洁
交通工程 2022年2期
马永洁
(北方工业大学电气与控制工程学院, 北京 100144)
0 引言
随着人民生活水平的提高,机动车数量增加,道路资源紧张,有序的换道在一定程度上缓解交通拥堵,换道模型的改进和确立对实际的车辆换道提供有效的帮助.
在早期非网联的环境下,换道多考虑到车辆的行驶速度和换道的安全距离,部分学者等[1-3]提出元胞自动机强制换道模型,建立双车道换道模型,采用模糊理论模拟车道换道过程的研究,分析不同换道策略下的换道收益,为复杂的交通流提供解决方法;部分学者[4-5]考虑邻道干扰,探讨了邻道同向和对向对本车道的影响,建立数学模型,确立最小安全距离公式. 但这并没有解决自由换道的问题,换道效率较低. 随后学者多确立更加灵活的换道策略, David等[6]引入冲突风险的博弈论换道模型,假设Nash平衡解,结合解释性变量,确定换道收益,使换道方法更加符合交通流实际情况.
在传统模型的基础上,国内外学者提出在网联环境下建立车辆的换道模型[7-12],曲大义等[13]根据传统车辆和网联混合交通流之间的关系,建立决策模型; Wei 等[14]研究在自动驾驶车辆和人为的混合交通环境,基于MLC位置概率密度模型,考虑驾驶员的压力和倾向性换道意图,提出换道模型改善交通流.
在网联交通环境下,由于车辆能获得的信息范围及内容均发生了变化,如车辆不仅能得到本车道前车及相邻车道前后车的车辆距离、速度信息,也能通过车通信或车路协同方式,得到本车道及相邻车道前后方更大范围内的车辆位置、速度、加速度等信息,同时路面的状态信息等通过检测器检测得到后,也更容易传输到车载终端供驾驶员参考,这些信息的获取对车辆换道决策会带来新的影响. 由于实际导致换道意图的可能性较多,在面向车联网交通环境,将综合考虑更多的车辆信息及路面信息,从换道内部影响因素和换道外部影响因素两方面出发,设计新的车辆换道模型.
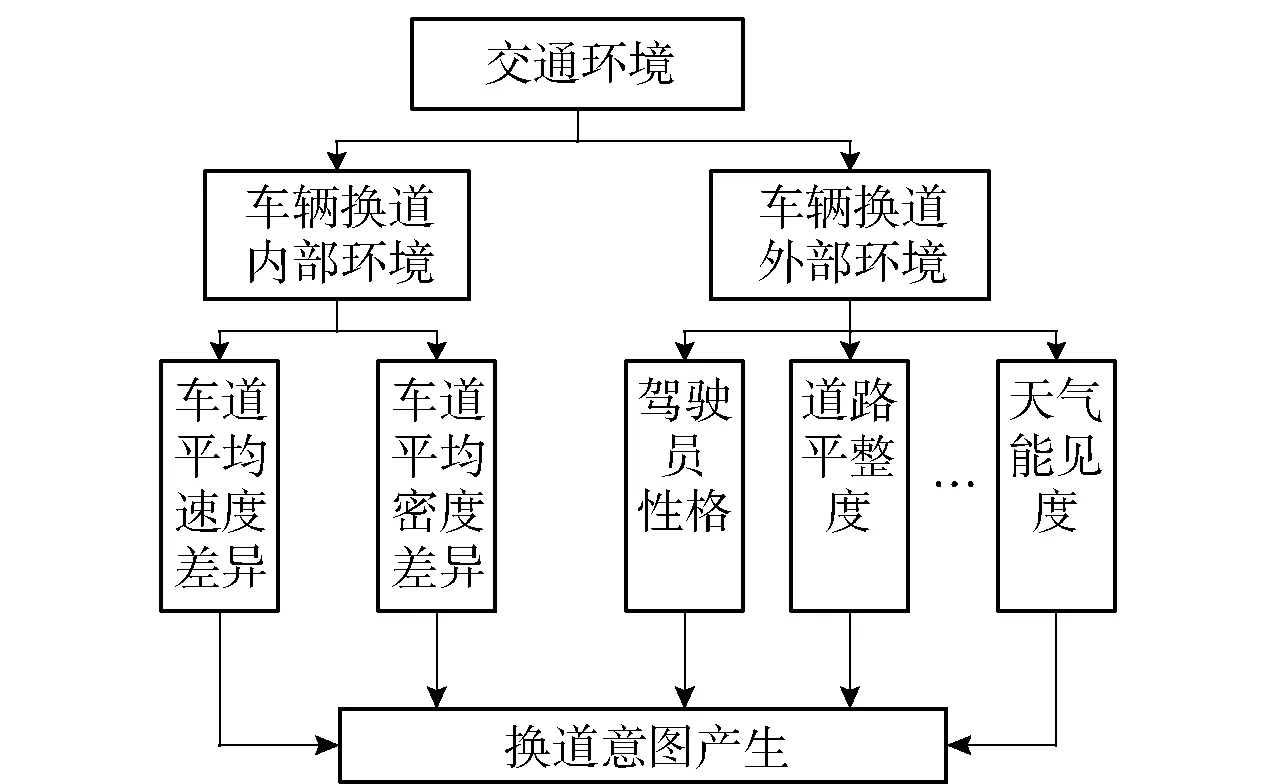
图1 网联交通环境下换道意图的产生
1 换道模型两级模糊控制器设计
1.1 换道内部影响因素的获取
在网联交通环境下,由于感知信息范围的扩大,本文选用更能体现交通流通行情况的车道平均车速差异和车辆密度差异作为内部换道模糊控制器的输入,平均速度差异反应了在关注区间范围内本车道与目标车道整体车速的比较,车辆密度差异反应了在关注区间长度范围内本车道与目标车道拥挤情况的比较,目标车辆往往选择行驶速度较大、车辆之间距离更大的道路.
(1)
1.2 内部条件模糊化
进行换道决策时,在车道关注区间内车辆平均速度方面,与实际驾驶员换道决策相一致,本文计算一定时间步内,本车道与目标车道平均速度在各时间步的比较情况,进一步分析两车道平均速度差异的分布情况,并进行模糊处理.平均速度差异的比较模型:

(2)
基于各采集时刻平均速度差异的比较值,得到n个采集时刻本车道与目标车道关注区间内的平均速度差异计算如下:
(3)
式中ΔVN为个样本时刻的平均速度差异,由式(3)可知,ΔVN∈[-1,1],即当ΔVN=1时,表明在N个采集时刻相邻车道关注区间内车辆平均速度均大于本车道关注区间内车辆平均速度,同理,当ΔVN=-1时,表明在N个采集时刻相邻车道关注区间内车辆平均速度均小于本车道关注区间内车辆平均速度.本文后续将ΔVN作为输入量之一进行模糊化处理.同理,可获得车辆密度差异的比较模型.
1.3 隶属度函数建立
输入变量车道平均速度差异建立的论域为[-1,1],根据一般经验将车道平均速度差异隶属度函数选为三角型隶属度函数,将车道平均速度差异和车道密度差异论域内划分为5个模糊子集{负大,负小,零,正小,正大},记[NB,NS,Z,PS,PB].
1.4 基于换道外部影响因素的模糊控制器设计
外部综合因素的改变同样影响着换道的可能性,在车辆的行进过程中,车辆需要感知路况平整度、天气的变化以及需要考量驾驶员的行驶性格是保守性还是激进性等.这些因素虽不易量化,但仍然有或大或小制约的效果.在本文中,主要考虑在基本换道条件满足情况下,路况的平整程度和驾驶员性格对换道决策产生的影响.
不同性格的驾驶员会有不同程度的换道阈值,根据驾驶员的性格特点,将其模糊化处理,主要分为3种性格特点:谨慎型性格、中型性格和冒进型性格,分别表示为M={NB,Z,PB};
本文将换道外部因素影响下的驾驶员性格输入变量定义域设置为[0,1],根据一般经验将换道意图隶属度函数选为高斯隶属度函数,将换道意图论域内划分为3个模糊子集{大,中,小},记作[NB,Z,PB],定义论域为{0,1/3,2/3,1}.
根据实际情况将道路平整度作为输入变量并进行模糊化处理,定义域设置为[0,1],根据一般经验将道路平整度隶属度函数选为高斯隶属度函数,分为5个等级:严重不平整、较不平整、平整、较平整和非常平整,分别对应5个模糊子集{负大,负小,零,正小,正大}.
1.5 基于内外部因素影响的二级模糊控制器设计
换道内部因素影响下的决策和换道外部因素影响下的决策为第1级模糊控制的2个分支部分,在这两部分所得到模糊控制的模糊输出量,不需反模糊化输出,而是直接作为接下来第2级换道决策模糊控制的模糊输入量,制定模糊控制规则,输出是否换道的模糊量.
2 双车道元胞自动机仿真模型设计
将双车道道路视为2条由n个元胞组成的离散格点图,如图2所示.有单辆车占据Cn=1和元胞空置Cn=0两种状态.设计元胞长度为7.5 m,代表一辆车在停车状态下车辆长度与车辆停车间隙之和,仿真中每条车道设置500个元胞,代替实际车道长度3.75 km,设置车辆的最大速度为vmax=5,对应实际车辆速度为120 km/h,车辆速度的范围为[0,5].

图2 元胞自动机模拟运动图
根据本文换道意图计算结果,综合形成元胞自动机中车辆换道模型设计如下,在目标车辆所对应的本车道前车以及相邻车道前车、后车形成的运行环境满足基本换道条件的情况下,还需通过前文所述二级模糊控制结果进行综合决策形成本文的换道模型如下:
换道模型:
(4)
式中,vn表示上一时刻目标车辆在本车道速度;dn表示目标车辆在本车道与前车的间距;gapn,gapn,back分别为第n辆车与前方车辆的间距、与相邻车道前方车辆的间距、与相邻车道后方车辆的间距;dsafe为模型中限定的安全换道间距;fout=1为模糊控制输出结果为换道.
本研究选用VB.net做为编程平台,结合本文所提模型,编程实现元胞自动机交通流仿真模型,内容包括元胞运算、平均速度和换道频率的统计分析、数据可视化等.
3 仿真分析
本文采用元胞自动机交通流仿真软件,对本文所提模型进行仿真分析,基本仿真参数设置见表1:

表1 仿真车辆参数设置
本文对网联交通环境下基于关注区间的换道意图模型进行分析,分别模拟双车道车辆正常运行和某车道出现交通事件2种场景,仿真时改变路段交通流密度,车辆数从0~900取不同值,将本文模型与STCA模型仿真得到的车辆平均速度进行对比,仿真对比结果如图3、4所示:在正常情况下,随着仿真车道内车辆数的增加,道路交通流状态由自由流状态向阻塞流状态过渡,本文模型与其他模型车辆平均速度均呈现下降态势,但对比本文模型与STCA模型可看出,本文模型下车辆平均速度总体大于STCA模型下车辆平均速度,尤其是车辆数位于250~400辆(密度为0.25~0.4)区间,速度优势较为明显,究其原因,由于本文模型采用以关注区间内车辆运行情况作为换道决策依据之一,能在一定程度上从全局的角度确定是否换道,避免了局部条件满足时频繁换道对交通流运行带来的影响. 进一步仿真某车道出现交通事件情况下的交通流运行情况,在元胞自动机模型中,设置横向第200个元胞处出现交通瓶颈,瓶颈长度为5个元胞,仿真结果如图4所示,从图4可看出,当某车道出现交通事件情况时,本文模型与STCA模型对比效果更为明显,尤其是在密度为0.25~0.45区间内,本文模型得到的路段交通流平均速度比STCA模型得到的交通流平均速度整体平均约提高5.6 m/s(约0.7个元胞),充分表明了本文所提出模型的有效性.
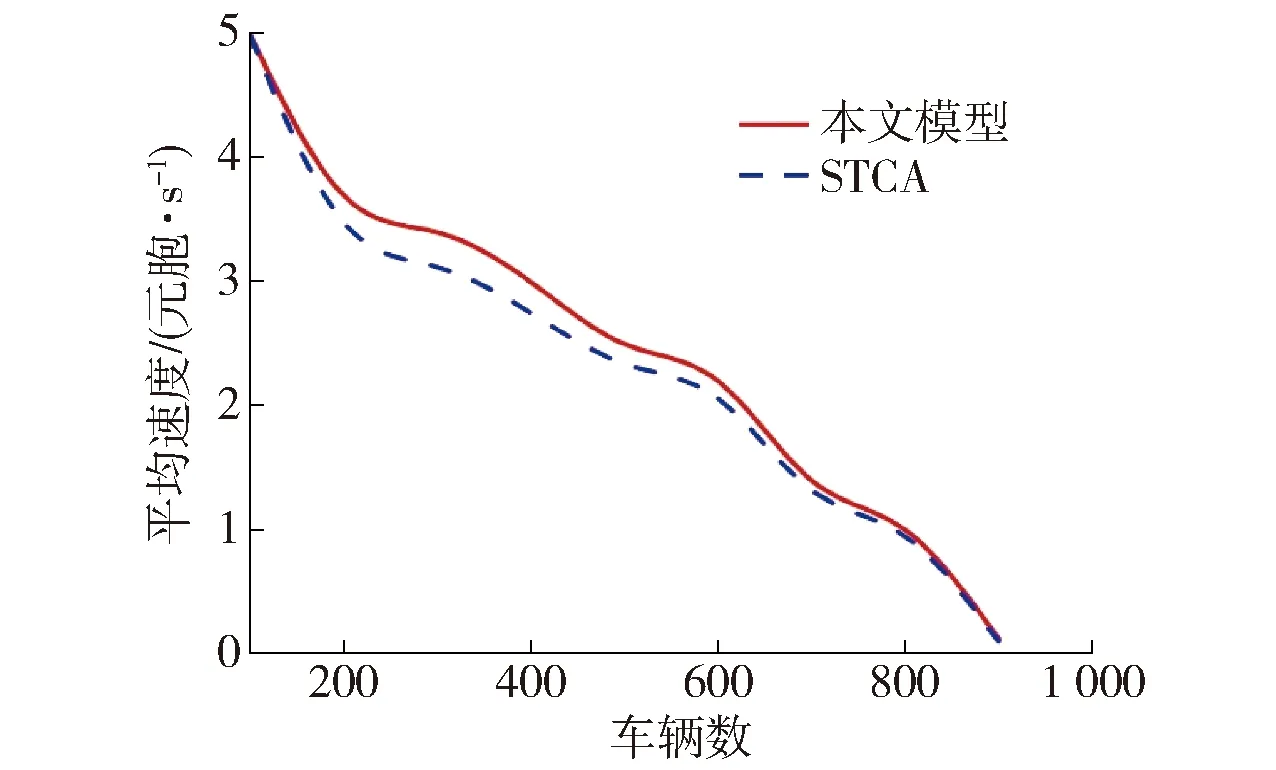
图3 正常环境下本文模型与STCA模型对比
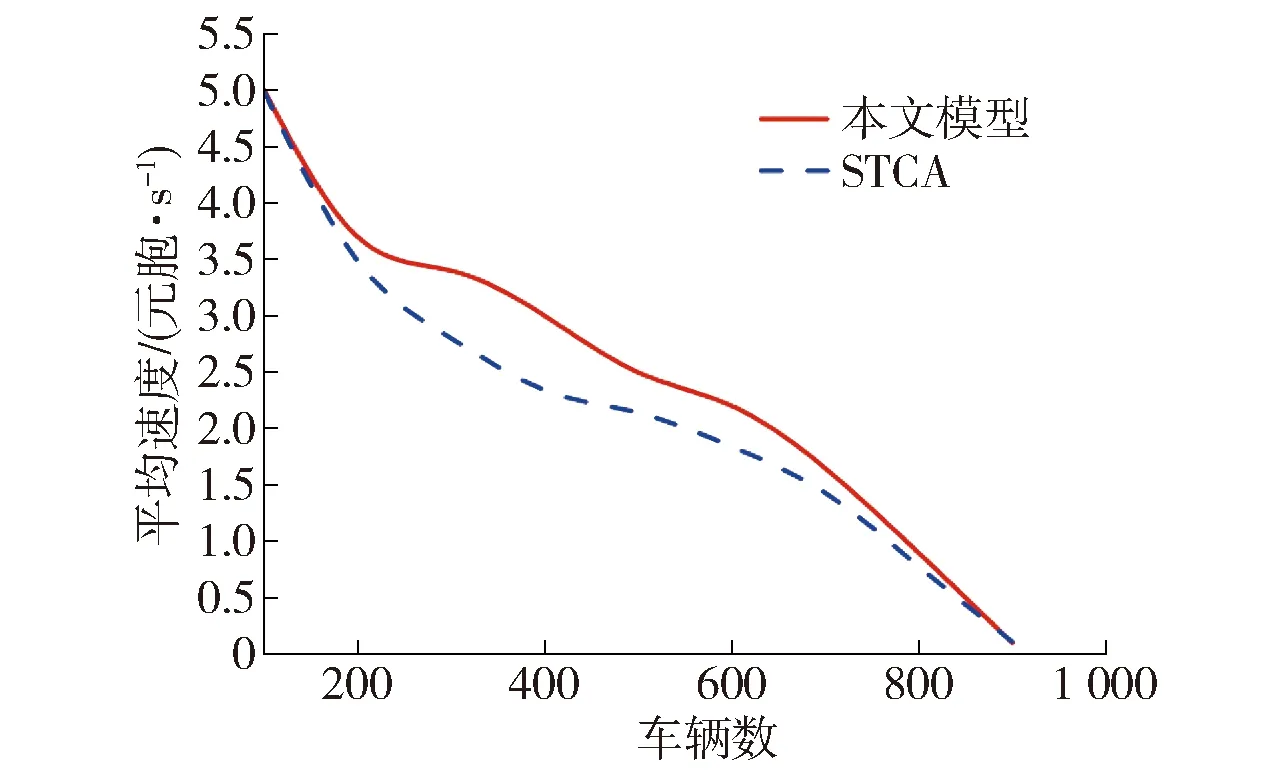
图4 交通事件下本文模型与STCA模型对比
4 结束语
基于网联车辆的信息获取范围及内容,提出关注区间概念,将传统的换道决策局部影响因子扩展为关注区间范围内的影响因子,进而从影响驾驶员换道的内部因素和外部因素两方面出发,设计了两级模糊决策的网联交通车辆换道模型,在此基础上,基于元胞自动机交通流仿真环境,对所设计的模型进行了仿真运行结果分析. 本文所提出的换道模型更符合车联网环境下的交通流运行特征,有一定的理论意义.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
延边大学学报(自然科学版)(2021年2期)2021-07-29
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
软件学报(2019年12期)2019-10-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智能计算机与应用(2018年5期)2018-10-20
