船载卫通天线自抗扰控制方法研究
2022-05-18 06:35:08麻召普张振庄王小宇
河北省科学院学报 2022年2期
麻召普,张振庄,王小宇,李 胜
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
舰艇在出海远航时,卫星通信成为舰船与外界进行信息沟通的重要手段,而卫通天线就是其中重要的一环。舰船在航行过程中偶尔会使船体产生高频振动,由于天线系统前馈陀螺的存在,当该高频分量被陀螺检测到并作用于系统时,往往会导致天线产生抖动,并无法自行恢复稳定,进而导致跟踪失锁,影响正常通信。
本文首先对天线伺服控制系统以及数字滤波器进行了阐述,对舰船航行数据进行频谱分析,并针对产生的高频分量分别设计了IIR与FIR滤波器,通过仿真分析与对比,确定IIR滤波器的优越性。该款IIR滤波器能够有效滤除船体产生的高频分量,提高天线跟踪的稳定性。
1 天线伺服控制系统
1.1 系统硬件组成
天线伺服控制系统主要由天线控制单元、前馈陀螺、反馈陀螺、码盘、驱动装置等组成。其中天线控制单元是该系统的核心,主要完成传感器信息采集、控制律实现等功能,前馈陀螺负责采集舰艇横倾、纵倾角速度数据,反馈陀螺主要采集天线面在空间上指向变化速率。系统组成如图1所示。
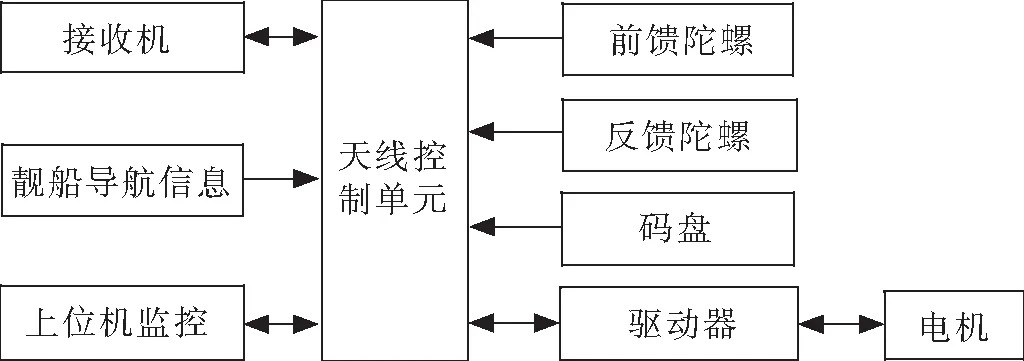
图1 天线伺服控制系统设备组成图
1.2 伺服控制环路组成
天线在跟踪过程中,依靠跟踪环和陀螺环可有效跟踪卫星,保证通信链路不中断。其中陀螺环对隔离载体姿态变化起主要作用,而跟踪环起到修复微小偏差的作用,比如卫星漂移、机械轴与电轴的不一致等[1]。除此之外,陀螺前馈对隔离船摇也起到一定作用。伺服控制环路组成如图2所示。
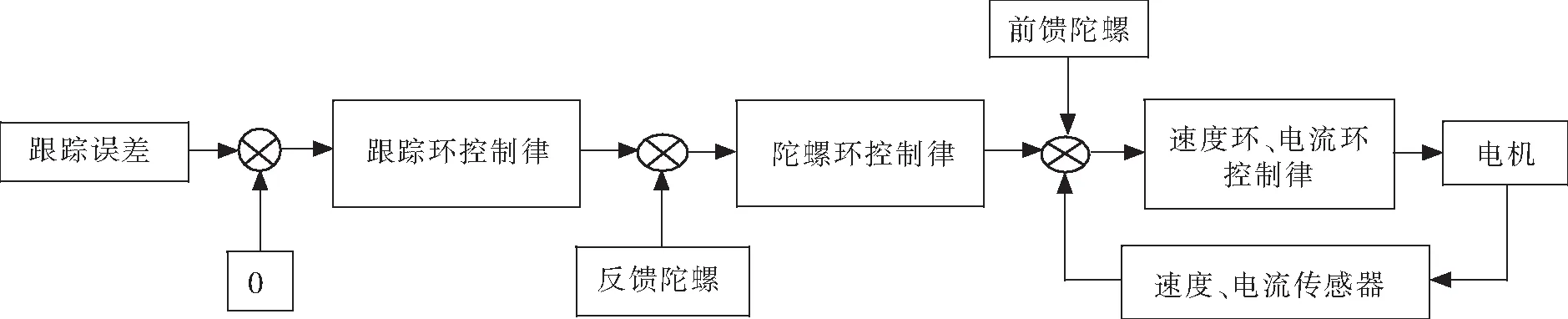
图2 伺服控制环路组成框图
2 数字滤波器简介
数字滤波器就是指某种具有选择性的数字器件、网络或以计算机硬件为支撑的计算程序。根据系统的单位取样脉冲响应的时间特性把数字滤波器分为两类:无限脉冲响应(IIR)滤波器和有限脉冲响应(FIR)滤波器。
工程上IIR滤波器的设计主要采用间接法:设计或选择已有的模拟滤波器系统函数Ha(s),再通过双线性变换转换方式将Ha(s)转换成数字滤波器的系统函数H(z)。由于IIR滤波器设计指标由幅频特性确定,因此在设计IIR滤波器时,只要求幅频响应满足设计要求,而不用考虑它的相频特性[2]。事实上,IIR滤波器的相频特性一般是非线性的,因此会改变信号的形状,而FIR滤波器经过设计可以使其相频特性严格线性,从而不会改变输入信号的形状,只是将信号在时域上延时几个采样点。
3 滤波器设计与性能对比
3.1 航行数据频谱分析
对船载2.4m卫通天线正常跟踪与出现抖动时间段的前馈陀螺数据进行频谱分析,数据记录采样率为10Hz,所得频谱图如图3,图4所示。通过对比发现,当天线出现抖动时,在4.5Hz附近出现较高幅值信号。
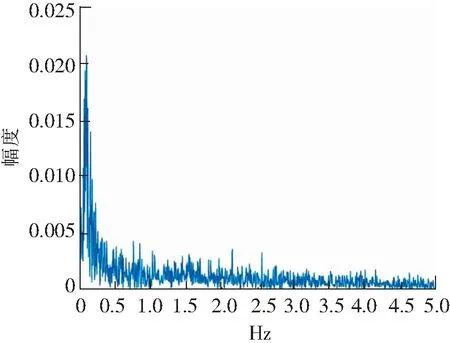
图3 正常跟踪时段前馈陀螺频谱图
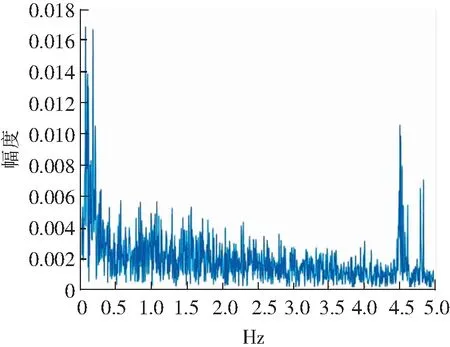
图4 出现抖动时段前馈陀螺频谱图
3.2 FIR滤波器设计
针对3.1节的震动信号频谱特性,基于汉宁窗函数法设计了4阶,3dB带宽频率为2.6Hz的FIR数字低通滤波器,其幅频特性如图5所示,从图5中可知,滤波器可对4.5Hz处的震动信号产生13dB的衰减。
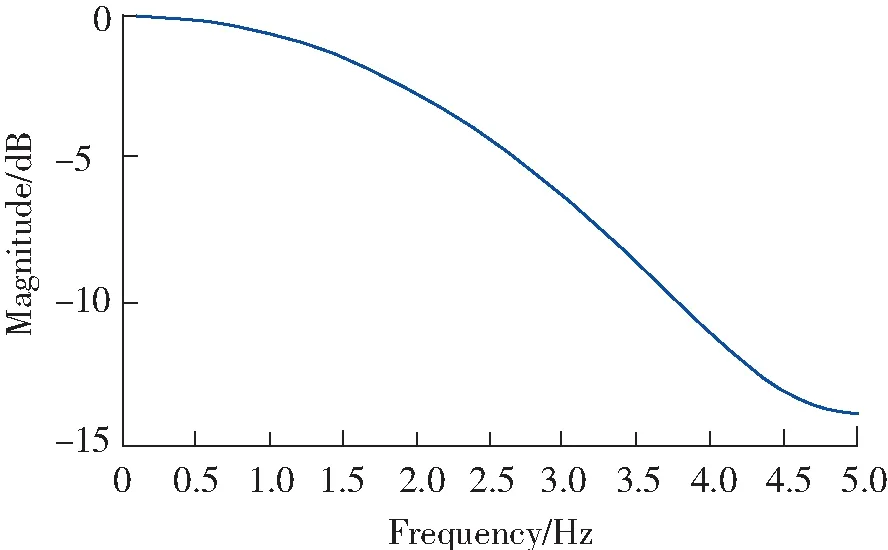
图5 FIR数字滤波器幅频特性
其相频特性如图6所示,从该图可看出FIR滤波器在保证幅度特性满足技术要求的同时,可以做到具有严格的线性相位特性。

图6 FIR数字滤波器相频特性1
天线伺服控制系统是一种随动系统、实时系统,控制系统需要对传感器采集的实时数据进行实时处理,所以需要对经过滤波后数据的实时性,即延时进行分析。此处设计的滤波器的阶次为4,滤波后产生的延时为0.2s[3]。说明FIR滤波器对各频段信号的相位延迟一致,进而保证滤波后信号波形不失真。
搭建仿真模型,对震动时段数据进行FIR数字滤波,滤波效果如图7所示。
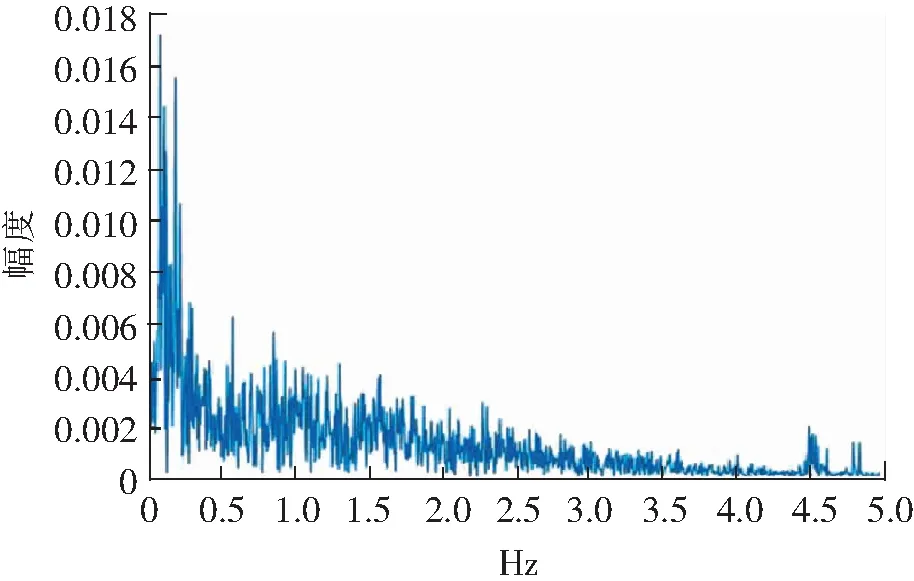
图7 FIR数字滤波器滤波效果
3.3 IIR滤波器设计
以“对4.5Hz处的震动信号产生13dB的衰减”为设计指标,设计了2阶巴特沃斯低通滤波器。其幅频特性如图8所示,从图中可知,滤波器可对4.5Hz处信号产生13dB的衰减。

图8 IIR数字滤波器幅频特性
其相频特性如图9所示,其相频特性呈现出非线性。
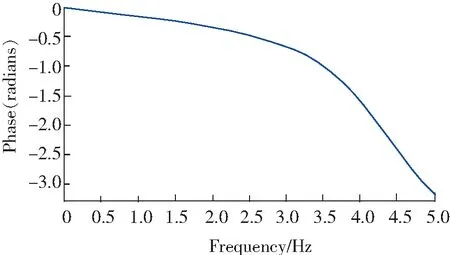
图9 IIR数字滤波器相频特性
在0-3.5Hz内,该款IIR滤波器的平均相位延迟为0.20rad/Hz。依据FIR滤波器的相位延迟为1.26rad/Hz,延时为0.2s,故可推算出该IIR滤波器的平均延时为0.03s。
对数据记录分析得“横倾”摇摆周期为6.6s,幅度为±2.26°;“纵倾”摇摆周期为3.4s,幅度为±0.88°。综合最大船摇速度为2.70°/s,进而可得0.03s内最大可导致天线指向产生0.08°的偏差,远小于0.21°(2.4m天线的1/10半功率波束宽度为0.21°)。
搭建仿真模型,对震动时段数据进行IIR数字滤波,滤波效果图见图10。
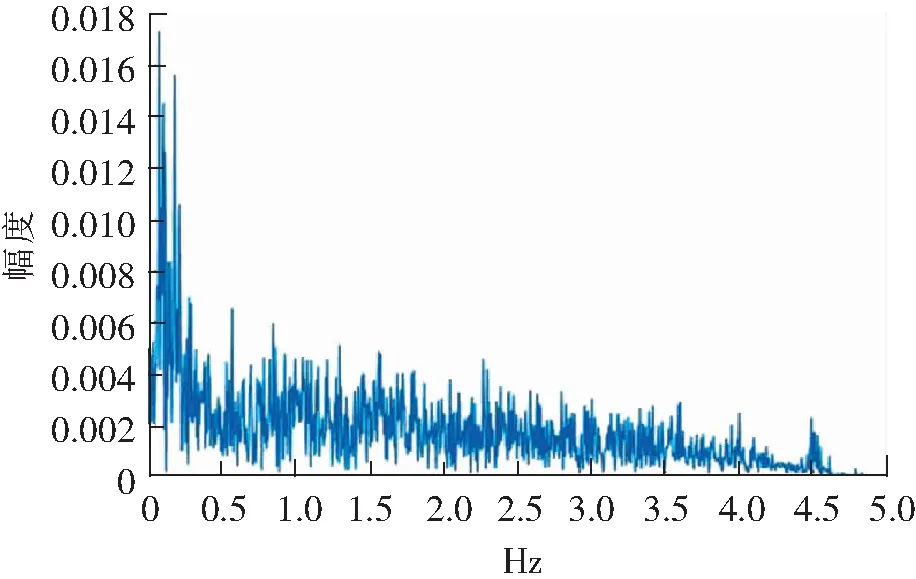
图10 IIR数字滤波器相频特性2
3.4 两种滤波器性能对比
为了从两者中选出最适合的滤波器,对两种滤波器性能进行对比,见表1。通过对比确定IIR滤波器最适合。

表1 IIR与FIR性能比较
4 摇摆台模拟测试
为了测试IIR滤波器的滤波效果,采用六杆摇摆台模拟方式,分别将滤波前、后数据文件作为摇摆台的模拟输入。当将滤波前数据文件作为模拟输入时,可明显感到摇摆台在高频抖动,当将滤波后数据文件作为模拟输入时,之前的高频抖动消失。摇摆台上位机界面如图11。
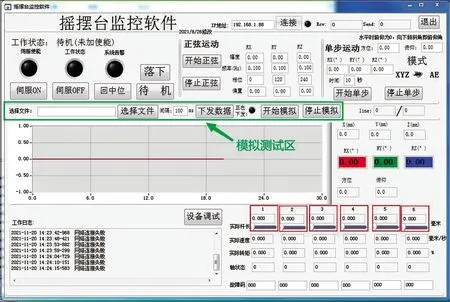
图11 摇摆台上位机界面
5 结束语
船载卫通天线在舰船航向过程中易受船体高频震动的影响导致其跟踪失败,本文针对高频分量的频率和幅值特性设计了IIR滤波器,经过对滤波系统仿真以及模拟测试,确定了该款滤波器可以有效消除天线的震动,保证系统工作稳定。
猜你喜欢
空间科学学报(2021年6期)2021-03-09 06:20:14
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
测控技术(2018年7期)2018-12-09 08:58:22
快乐语文(2018年36期)2018-03-12 00:56:02
电子技术与软件工程(2017年8期)2017-05-10 00:52:24
无线电通信技术(2015年3期)2015-12-23 11:37:00
现代电子技术(2015年11期)2015-07-28 12:50:58
河南科技(2015年11期)2015-03-11 16:25:02