基于鲸鱼算法优化DV Hop的人员定位算法
2022-05-17 02:56:56哲董楦张德广何子东靳健欣
河北电力技术 2022年2期
刘 哲董 楦张德广何子东靳健欣
(1.国网河北省电力有限公司,河北 石家庄 050021;2.河北省送变电有限公司,河北 石家庄 050051;3.国网河北省电力有限公司经济技术研究院,河北 石家庄 050022;4.国网河北省电力有限公司建设公司,河北 石家庄 050030)
0 引言
电力企业是我国社会、经济发展的基础产业,其性质和特点决定了具有易燃、易爆、易触电、高压以及带电工作等特点,且发生安全事故影响面广、破坏性强、波及范围大等问题,其安全管理属于重点及难点问题,该行业易发生安全事故,直接威胁着现场工作人员的生命安全。因此,精确定位人员位置对建立快速救援机制和抢救伤员具有重要意义。无线传感网络(Wireless Sensor Network,WSN)被广泛地应用于环境监测、国防军事、危险区域远程控制、抢险救灾、人员定位等诸多领域[1]。对于WSN 而言,网络节点的位置信息是设计定位网络结构、数据标记和网络节点跟踪的基础。因此,人员定位的本质是进行网络节点的位置坐标进行估计。传统的WSN 定位算法分为测距式算法和非测距式算法[25],前者主要包括达到时间(TOA)、达到角度(AOA)、达到时间差(TDOA)和信号接收强度(RSSI)等,后者主要有APIT、质心算法和DV-Hop。与测距式算法相比,非测距式算法具有成本低、网络寿命长和抗干扰能力强的优点。由于DV-Hop 算法具有功耗低、方便使用和定位精度高的优点,因此DV-Hop算法被广泛地应用于WSN 中。
为提高人员定位的精度,选择鲸鱼优化算法[6](Whale Optimization Algorithm,WOA)改进DV-Hop 算法,提出一种基于WOA-DV-Hop人员定位算法。结合无线传感网络技术,针对人员定位的经典算法-距离向量跳段算法(DV-Hop算法)定位误差大的问题,引入群智能寻优鲸鱼算法优化多目标定位的执行过程,解决DV-Hop算法本身存在的锚节点与未知节点之间的距离估计的误差问题。研究结果表明,与普通的DV-Hop人员定位算法相比较,WOA-DV-Hop 人员定位算法可以有效提高人员定位的精度。
1 鲸鱼优化算法
在鲸鱼优化算法中,包括包围猎物、狩猎行为以及搜索捕食[7]等3种行为方式。每只鲸鱼的位置表示一个可行解。
1.1 包围猎物
座头鲸发现猎物之后将快速包围猎物,同时按式(1)和式(2)更新鲸鱼位置:

式中:、为系数;t为当前迭代次数;||为绝对值;和(t)分别为鲸鱼个体的最佳位置和当前位置。的计算表达式如式(3)所示:

式中:M为最大迭代次数;r∈[0,1]的随机数;a∈[2,0]的随机数。
1.2 狩猎行为
座头鲸采用螺旋运动进行狩猎,鲸鱼个体首先计算与当前最优鲸鱼的距离,见式(4),然后再以螺旋方式游走,进行食物的搜索,螺旋游走方式的数学模型如式(5)所示:

式中:b为螺旋形状控制参数;l∈[-1,1]的随机数。使用式(4)获得当前鲸鱼个体到最好位置的鲸鱼个体的距离向量。
使用式(6)来指代实现收缩包围圈和螺旋更新位置同步模型,过程中通过概率p完成进行收缩包围,在狩猎过程中,鲸鱼将以50%的概率包围猎物或狩猎[8-9]:

1.3 搜索捕食
如果|A|>1,那么鲸鱼将离开现在所包围的猎物去寻找新的猎物,位置更新式如式(7)和(8)所示:

式中:Xrand为随机选择的鲸鱼位置。
2 基于WOA-DV-Hop的人员定位
DV-Hop算法是基于跳数的定位算法[10],估算信标节点i的平均跳距Hopsizei如式(9)所示:
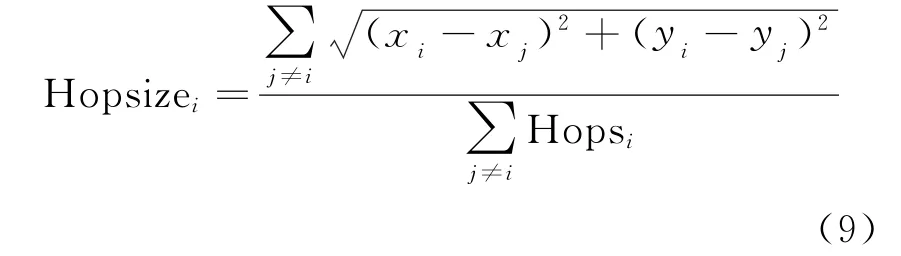
式中:(xi,yi)和(xj,yj)为信标节点i和信标节点j的坐标;Hopsi为信标节点i和信标节点j(i≠j)之间的最小跳数。因为测量误差的存在,导致人员定位时必然存在定位误差,因此人员定位问题本质上就是求解人员定位误差最小化的问题。
如果未知节点的位置坐标为(x,y),未知节点和第i个信标节点之间的距离di,那么人员定位误差问题如式(10)所示:

式中:di为dj的实际测量距离。
为实现人员定位误差的校正,基于WOA-DVHop的人员定位的目标函数如式(11)所示[11]:

式中:n为未知节点的数量为未知节点与信标节点i之间跳数值的倒数。通过WOA 算法优化DV-Hop进行人员定位,就是将寻找到的最优解作为未知节点(人员位置)的最终估算位置。
通过对DV-Hop算法进行人员定位的具体的执行过程分析可以发现,在算法执行的第三阶段测量锚节点与未知节点间距离时,由于外界因素及内部测量的误差使得误差较大。误差产生的原因在于锚节点与最小跳数的准确性以及计算未知节点的AHD、多目标定位的优化所产生的误差。为了减少误差,使用鲸鱼算法优化目标定位阶段的定位精度,在DV-Hop算法的第三阶段使用目标优化公式,建立了WOA-DV-Hop的人员定位的算法,完成对未知节点坐标的估计和人员的精确定位。
基于WOA-DV-Hop的人员定位的算法流程可以详细描述如下。
Step1:初始化DV-Hop算法和WOA-DV-Hop算法参数,设置网络区域为100×100 mm ,随机生成取值范围从1~100的随机数分别作为节点的二维坐标,区域内所有节点总数为100,其中信标节点和未知节点数目分别为8和92。WOA 算法,种群规模popsize=100,最大迭代次数Tmax=100,令当前迭代次数t=0;
Step2:随机初始化鲸鱼种群;
Step3:以式(11)为目标函数,计算鲸鱼种群适应度大小并排序,找出种群当前的全局最优解的位置;
Step4:如果t≤Tmax,则更新A、C和a;反之,迭代寻优;
Step5:当p<0.5时,如果|A|<1,则按式(1)更新鲸鱼个体的位置;如果|A|≥1,则随机选择鲸鱼个体位置Xrand,按式(7)更新鲸鱼个体的位置;
Step6:当p≥0.5时,则按式(6)更新鲸鱼个体的位置;
Step7:限制鲸鱼搜索范围,防止超出搜索范围;
1.平针绣法:平针绣是天水绣花鞋垫最为常见的一种针法,就是上下扎针将绣线在图案纹样内排列均匀整齐,不重叠,不交叉,不露底,拉线轻重一致,达到绣面针脚匀、齐、平、密的艺术效果。平绣工艺是比较精致、写实的刺绣形式,极富表现力,多用来描绘自然生物如花卉和禽类题材,形象栩栩如生,常用对比和晕色手法,视觉效果强烈。
Step8:计算鲸鱼个体的适应度并进行排序,找到适应度最佳时所对应的鲸鱼个体X*,并进行保存;若t>Tmax,那么执行Step9;否则,重复执行Step4-Step8;
Step9:输出人员定位的最佳位置(x*,y*)。
3 仿真与分析
为了评价人员定位的效果,本文利用Matlab仿真软件,并选择归一化定位误差erra作为评价标准,归一化定位误差erra计算式如式(12)所示[12]:

式中:K为总节点数;N为信标节点位置;R为通信半径;(x′j,y′j)和(xj,yj)分别为未知节点j的估计位置和实际位置。
假设节点的通信半径R=30 m,仿真区域正方形平面区域[13],大小为100 m×100 m。DVHop算法:总节点数K=100,信标节点数N=8。WOA 算法:种群规模popsize=100,最大迭代次数Tmax=100。算法定位效果图如图1所示。

图1 算法定位效果
由图1可知,与普通的DV-Hop人员定位算法相比较,WOA-DV-Hop 人员定位算法可以有效提高人员定位的精度。WOA-DV-Hop寻优迭代图如图2所示。

图2 WOA-DV-Hop寻优迭代示意
为了进一步说明人员定位的效果,分别研究信标节点比例、通信半径R和节点总数对归一化平均定位误差的影响,研究结果如图3-5所示。

图3 信标节点比例对归一化平均定位误差的影响
图3中,通信半径R=30,节点总数K=150,信标节点比例由10%逐渐增加到31%。随着信标节点比例的增加,定位误差持续降低,且整体上本文提出的WOA-DV-Hop算法的误差值略低于DV-Hop定位算法,定位精度有提高,但是定位精度提升趋势放缓。
图4中,信标节点比例为20%,节点总数K=150,通信半径由21 m 逐渐增加到45 m,增加步长为3 m。随着通信半径的增加,定位误差呈现下降趋势,且整体上本文提出的WOA-DV-Hop算法的误差值低于DV-Hop定位算法,这是因为随着通信半径的增加,节点间的跳数越小,其计算出的距离误差也随之变小,定位精度不断提高。
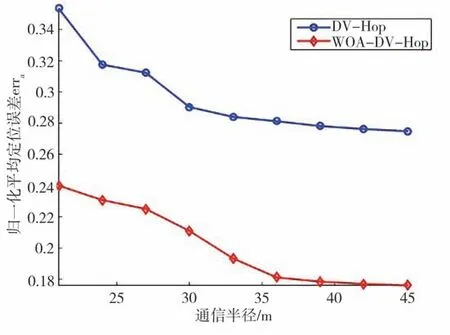
图4 通信半径对归一化平均定位误差的影响
图5中,信标节点比例为20%,通信半径R=30,节点总数由100按照步长20逐渐增加到200。随着节点总数的增加,未知节点和信标节点的分布将更加均匀,使得网络的连通性更好,因此与普通的DV-Hop 人员定位算法对比,本文提出的WOA-DV-Hop人员定位算法与的定位误差值远低于DV-Hop算法,且随着节点增加误差持续降低,定位精度不断提高。

图5 节点总数对归一化平均定位误差的影响
4 结论
为了改善电力企业高危岗位存在的人员主观安全风险问题,本文提出了一种改进的人员定位算法,运用科技手段强化现场安全监管,提升生产稳定性及人员安全。在经典的DV-Hop定位算法的基础上,引入群智能寻优鲸鱼算法优化多目标定位的执行过程,在DV-Hop算法中使用目标优化公式,降低了DV-Hop算法本身存在的锚节点与未知节点之间的距离估计误差,实现了对未知节点坐标的估计和人员的精确定位。研究结果表明,WOA-DV-Hop 人员定位算法可以有效提高人员定位的精度,并且随着信标节点比例、通信半径R和节点总数等参数的增加,人员定位精度将持续增加。另外由于计算信标节点间的估算距离,一定程度增加网络节点之间的通信量,降低了执行效率。后续将研究引入分布式系统提高效率和降低网络能耗。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
幼儿100(2022年41期)2022-11-24 03:20:20
数学大王·趣味逻辑(2020年9期)2020-09-06 14:17:17
小天使·二年级语数英综合(2019年4期)2019-10-06 02:44:36
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
动漫星空(2018年4期)2018-10-26 02:11:54
铁道通信信号(2018年3期)2018-04-19 02:32:56
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
水道港口(2015年1期)2015-02-06 01:25:45