基于CBLA的无刷电机超前角控制系统研究
2022-05-17 07:56陈丁玲倪俊芳孙家圆
科技创新与应用 2022年13期
陈丁玲,倪俊芳,孙家圆
(苏州大学 机电工程学院,江苏 苏州 215021)
BLDCM(Brushless Direct Current Motor)是以电子换向器取代了机械换向的直流无刷电机。其通常采用方波控制,通过切换U,V,W三相绕组中任意两相通电来改变磁通量的方向,并运用三相全桥电路来改变电流的方向以及相电压的大小,使电机旋转[1-2]。该方波控制的方法,存在电机换相不平稳,转矩波动较大,且相电流对于相电压存在滞后而导致电机效率较低的问题。
国内研究者刘建林等[3],在基于方波控制前提下,研究了通过对传感器进行在线矫正策略来确定最优超前角,改善了电机效率低的问题。施晓青、蔡骏等[4-5],研究了以相电流为反馈对换相误差进行闭环校正,以及利用母线电压做调速控制,减小了电机转速不平稳的问题。国外Upama Das,Do-Hyeon Park等[6-7],分析了基于经典闭环控制下电机转速和扭矩响应的变化,通过对霍尔错位效应进行补偿,减小了转矩脉动。但是由于控制方式的限制,电机在持续带载的状态下,换相误差的增大会导致电机输出功率减小,调速范围小的缺点。因此本文基于CBLA(Conduction band and lead angle),即每相导通带和超前角控制,将采用PID和速度闭环控制,建立CBLA超前角控制系统,并进行Matlab仿真,同时将基于方波控制开发CBLA控制软件,对该控制系统进行研究。
1 CBLA超前角控制原理
CBLA超前角控制核心是控制三相全桥电路的驱动方式,改变两相绕组导通的方波控制方式,通过两相和三相绕组交替导通控制,改变CB和LA的大小。
以极对数为2的无刷电机为例。方波控制中,每60°周期内进行U、V、W三相绕组两两换相,经六步换相使电机旋转一圈,且每相导通带为120°。CBLA超前角控制中,前(60°-LA)周期内导通两相绕组,剩余LA周期内超前导通第三相绕组,此时三相绕组导通,每相导通带为CB,同样遵循六步换相原则。超前角LA和每相导通带CB的关系可以表示:
其中,CB(°)为导通相带,LA(°)为超前角度,p为转子磁极对数。
以CBLA=135°/15°控制为例,当检测到Hall abc为101时,在前45°周期内导通UH、WL两相。剩余15°周期内(黑色区域),V相提前15°导通,MOSFET开通UH、WL、VH,三相绕组导通。如图1所示。

图1 CBLA超前角控制原理图
以此类推,在每个60°周期内,有45°周期导通两相绕组,15°周期导通三相,每相导通时长均为135°。
2 Matlab/Simulink建模与仿真
CBLA超前角控制系统的Matlab/Simulink仿真采用速度闭环PID控制[8],对三相全桥电路采用CBLA超前角控制,CBLA的计算是通过电机的转速反馈来预估超前角的大小实现动态控制。
基于方波控制推导无刷直流电机的传递函数[9-10]。由BLDCM三相电压平衡方程

式中:Ua、Ub、Uc为定子各相绕组电压(V);Ia、Ib、Ic为定子各相绕组电流(A);Ea、Eb、Ec为定子各相绕组反电动势(V);L为每相绕组的自感(H);M为每两相绕组之间的互感(H);R为每相绕组的电阻(Ω)。
当功率管开通时,线电压近似等于逆变桥直流侧电压,不考虑暂态过程,则A、B两相稳态导通,两相的反电动势大小相等,方向相反,于是由线电压方程可得:

其中,Ud是直流母线电压,ra是绕组线电阻,ra=2R,La等效线电感,La=2(L-M),ke是反电动势系数。
将电流用角速度表示:

其中,KT为电机转矩系数,TL为负载转矩,J为转子转动惯量,Bv为黏滞摩擦系数,Ω为电机角速度。
电压和负载共同输入下的速度响应:

基于六步换相,改变三相全桥电路的驱动方式,开发CBLA超前角控制软件,如图2所示。
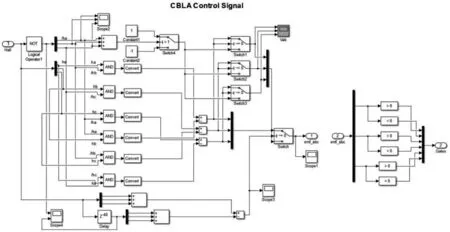
图2 CBLA软件控制框图
由速度响应传递函数、PID控制和CBLA超前角控制软件构建基于CBLA的Matlab/Simulink仿真模型,如图3所示。

图3 基于CBLA的Matlab/Simulink超前角控制系统仿真模型
仿真结果:给定电机转速5 000 rpm,并在0.1 s处给3 N·m的负载。方波控制下,该电机最大转速只能达到3 400 rpm,且带载情况下速度只能维持在3 100 rpm。CBLA超前角控制,可以使电机的转速达到预定的5 000 rpm,并在带载状态下,转速能稳定在4 000 rpm,对比方波控制转速提升了接近900 rpm。如图4所示。

图4 方波控制和CBLA控制下转速仿真图
3 对比实验
对CBLA超前角控制系统在无刷直流电机转速和输出功率上的提升做验证。利用降速法,模拟电机的持续带载状态,并对比方波控制和不同CBLA大小对转速,扭矩以及输出功率的影响。
实验平台搭建:2对极无刷直流电动工具圆锯,直流电源,电子模块,测功机和实验台架等,如图5所示。
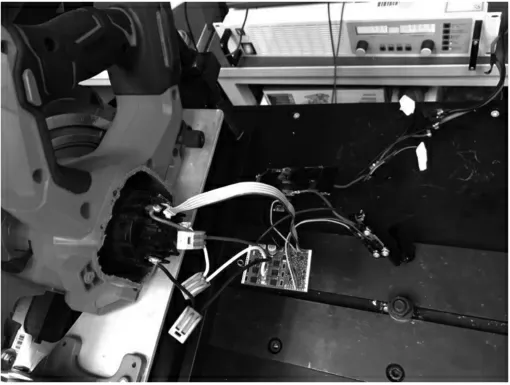
图5 实验平台
实验中共选取了方波控制以及3个不同CBLA来对比无刷直流电机的转速、扭矩和输出功率,实验数据如图6所示。
由图6可得,电机最大输出功率时刻时的转速和扭矩大小,见表1。
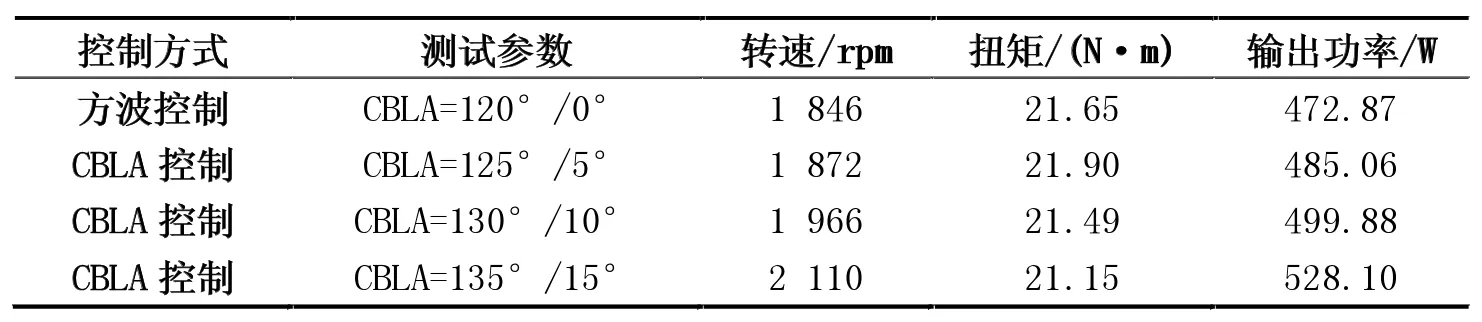
表1 实验对比结果参数表
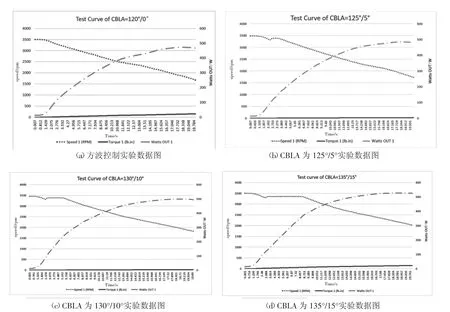
图6 不同CBLA下转速、扭矩、输出功率对比图
结果表明,相较于方波控制,CBLA超前角控制在转速和输出功率上均有较大的提升,且CBLA=135°/15°时,转速和功率提升最大,转速提升约12.5%,输出功率提升约10.5%。
4 结束语
本文基于无刷电机方波控制理论,研究了基于CBLA超前角控制系统,并进行Matlab仿真和结合电动工具圆锯的实测对该控制系统进行验证。该控制系统对比方波控制,速度最大提升了12.5%,输出功率最高提升了10.5%。电机的带载能力有较大地提升,满足了实际应用要求。
猜你喜欢
电子科技(2022年10期)2022-10-15
电工电能新技术(2022年9期)2022-10-09
科技信息·学术版(2021年7期)2021-01-10
科学与财富(2020年24期)2020-10-27
速读·下旬(2019年3期)2019-04-11
课程教育研究·学法教法研究(2018年20期)2018-08-11
科学与财富(2017年27期)2017-10-17
科技视界(2016年18期)2016-11-03
现代电子技术(2015年17期)2015-09-23
科学时代·上半月(2013年3期)2013-05-10