
基于下垂控制的微电网并网预同步控制研究
2022-05-14 10:27梁明玉蔡新红龚立娇
计算机仿真 2022年4期
梁明玉,蔡新红,龚立娇,王 宾,2
(1. 石河子大学机械电气工程学院,新疆 石河子 832003;2. 清华大学电机系,北京 100084)
1 引言
随着新能源发电技术的迅速兴起,如光伏发电和风力发电技术,对传统的配电网技术提出了更高的要求。相较于传统的分布式发电技术,微电网作为集中分布式微源的处理方法,在输送容量、微源的可控性以及电能质量等方面有极大的提高,已经成为当前新能源发电行业的研究热点[1]。
通常微电网有两种运行模型,即可与主网并网运行,也可作为一个独立系统孤岛运行,灵活性高。可再生能源在供电系统中所占的比重增大,扩大了微电网并网的规模,同时对大电网的电能质量产生了较大的影响。因此,如何提高微网并网时的稳定性,解决不同模式之间的切换问题,是当前研究微电网的关键。文献[2]通过模拟虚拟同步发电机在运行时的下垂特性,采用虚拟同步法控制微电网运行在孤岛/并网两种模式下,但该方法没有充分考虑VSG的并网特性。文献[3]通过分析并网时的电压和频率提出一种有差调节控制系统,有效解决了并网电压的畸变,但是经过一次调节后产生的偏差,导致并网功率出现波动,从而影响主网的稳定运行。文献[4]提出了一种主从控制结构的并离网切换方法,优化了并网时逆变器输出的功率,但未考虑到两种模式切换过程中电压相位的改变给电网造成的影响。文献[5]提出了一种下垂控制方法,通过改进并网时的下垂控制参数,避免了逆变器在并网过程中对电网造成的冲击,提高了并网的可靠性。文献[6]通过在下垂控制策略中加入超前相位控制,逆变器在并网过程中输出的电压略微提前与电网电压,避免了两种模式切换时电网电压出现逆流的现象,提高了能量的转换效率,但降低了控制的精度。文献[7]提出了一种在下垂控制中加入电压幅值反馈控制环,利用模糊控制器调整控制参数,使产生的补偿信号作用于电压环,实现了对电压的无差跟踪,有效提高了系统的稳定性。文献[8]基于微电网的结构,提出了一种多层级控制方法,分析了并离网模式平滑化切换时电压功率的输出特性,但未分析并网时系统的动态性能。
基于上述研究中存在的缺陷,本文针对微电网在并网运行时存在的电压、功率波动的问题,立足于三相电压源型并网逆变器,在旋转坐标系下,提出一种基于下垂控制的并网预测同步控制方法。通过对基于三相电压源型逆变器的并网结构进行分析,对其拓扑结构的连接方式等效变换,采用空间坐标旋转的方法计算线路的功率,推导了文章所提下垂控制策略参数设计的数学模型,并分析了微电网在负荷突变的情况下,并网电流波动大的现象。改进的控制策略能够实现微电网内频率的无差调节,优化了并网的电压电流,解决了负荷突变时功率波动大的问题,实现逆变器输出电压对电网电压相位的同步追踪,确保微电网由孤岛模式与并网模式的平滑切换。
2 下垂控制逆变器的建模
目前,微电网并入电网多使用电流控制型电力电子变换器,通过调节并网电流的变化幅值和功率因数角,对系统的有功功率和无功功率进行调节,但是大量的电流型控制器件接入系统,会削弱系统的阻尼和等效惯量,导致电网调频调压的难度增大[9],并且产生同步振荡和谐波振荡问题。基于下垂控制的电压源型逆变器参考同步发电机的调压调频特性,利用并网电压幅值频率、有功和无功输出功率之间的下垂关系,能够实现输出特性的调节,其拓扑结构如图1所示,其中,直流侧输入电压为Udc,桥臂由A、B、C组成三相逆变桥,逆变器侧滤波电感为Lf,r是电感等效电阻,iLa、iLb、iLc为电感电流,ioa、iob、ioc为负载侧输出电流,uoa、uob、uoc为电容侧输出电压。

图1 三相电压源型并网逆变器拓扑结构
基于上述三相电压源型逆变器的拓扑结构,本文选取逆变器的滤波电感电流和电容电压为模型的空间状态变量,忽略线路产生的高次谐波,根据基尔霍夫定律可得
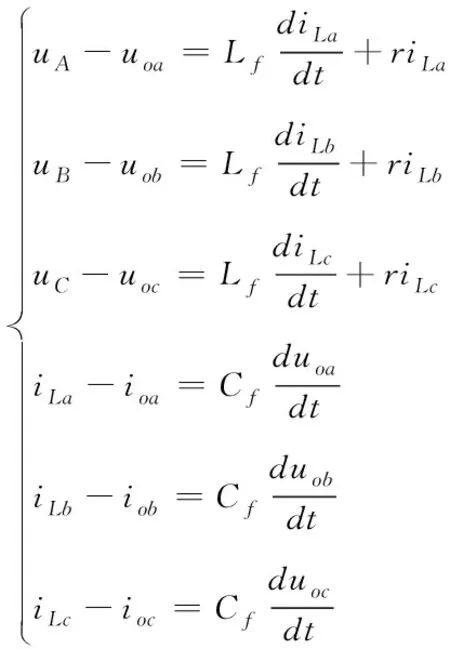
(1)
通过对逆变器拓扑结构得到的三相静止坐标系下的数学模型分析可知,三相对称模型中,可以用其中两个独立变量简化数学模型。因此,引入Clark变换分析三相逆变器的数学模型,将静止坐标系下的三个变量转换到两相坐标系下,其变换原理如图2所示。

图2 三相静止坐标系abc与两相静止坐标系αβ的关系
由坐标关系图可得,将三相静止坐标系下的逆变器桥臂电压转化到两相静止坐标系上,其数学模型可表示为
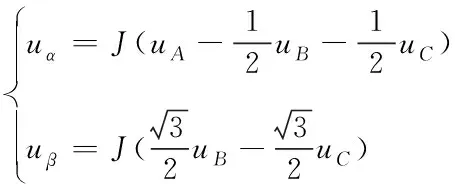
(2)
其中,J=2/3是在变换过程中保证两相坐标中等效矢量的模与相电压的模值相同,将上式变换成空间状态方程为

(3)
其中,Clark变换后的等幅矩阵为
(4)
通过上述数学推导,利用Clark变换原理,简化了电压源型逆变器的数学模型, 变量数减少有利于提高控制精度,但是不足的是控制变量仍然是交流变量,因此在采用PI控制时无法取得无静差效果,所以,本文采用Park变换将两相静止坐标系下的变量变换为dq两相旋转坐标系下的直流量,其变换原理如图3所示。

图3 αβ两相静止坐标与dq旋转坐标关系

图4 并网逆变器结构控制电路
由Park变换原理图可知,dq旋转坐标是基于两相静止坐标系下,以交流变量的角频率为旋转角速度,在αβ坐标系上沿着逆时针的方向同步旋转变换,其中θ是旋转坐标系的d轴与静止坐标系的α之间的相角差值,一般取A相的相角。根据两者的关系,可以得到两相旋转坐标系下的逆变器变量公式

(5)

(6)
其中式(6)是两相静止坐标变换到两相旋转坐标系的Park变换矩阵。将上面推导得到的三相电压源型逆变器在αβ坐标系下的数学模型两边同乘以Park变换矩阵,可以得到逆变器在dq坐标系上的状态空间方程,即三相全桥电压源型逆变器在旋转坐标系下的数学模型。

(7)
基于上述电压源型逆变器的拓扑结构及数学模型的推导,提出了一种改进下垂控制微网逆变器的预同步并网控制策略,利用逆变器输出电压对电网电压的相位进行追踪和同步,实现微电网逆变器在并网过程中的平滑切换,其拓扑结构及控制电路如图4所示,该控制电路可在并离网模式下运行。
3 下垂控制策略
下垂控制主要是利用传统发电机的频率一次下垂曲线作为微电源的控制方式,通过p-f和Q-V下垂控制来获取系统的频率与电压,从而对微源输出的有功和无功功率分别进行控制,无需微源之间的协调通信,实现了分布式电源即插即用的目的[10]。微电源并联运行时,利用逆变电路测量输出功率,通过下垂特性曲线获得输出电压的频率和幅值的参考值,将参考值反馈到控制模块,调节输出电压的幅频使得有功和无功功率合理分配。逆变器的输出电压和幅值的下垂关系如下
(8)
由图7可得,微电网在运行时输出的复功率为

(9)



(10)
由基尔霍夫方程可得,逆变器输出的有功功率与无功功率分别为:

(11)
由式(11),逆变器工作时输出的有功和无功功率与输出的电压、线路阻抗和电压相角有关。根据表1知,当逆变器工作在中高压系统中时,线路的阻抗呈感性,X≫R(Z=R+jX),电阻R可以忽略不计,此时Z=X,θ=90°,功率角δ较小,满足sinδ=δ,cosδ=1。因此,上式可简化为以下形式:

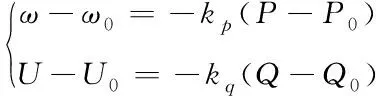
(12)
其中,ω0、U0分别为逆变器输出的额定角频率与额定电压。kp,kq是控制逆变器的下垂系数。P,Q分别为逆变器实际输出的有功功率和无功功率。P0,Q0分别为逆变器额定有功和无功功率[11]。因此,传统三相逆变器的下垂控制框图如图5示。
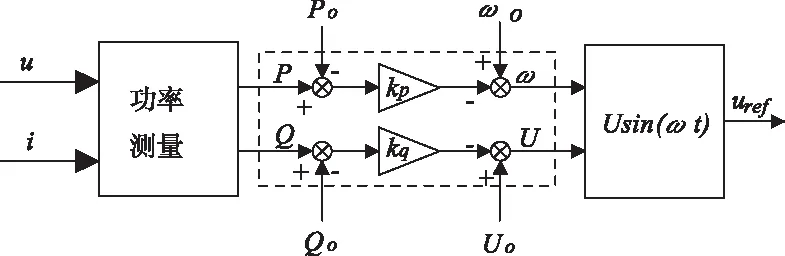
图5 传统三相逆变器的下垂控制框图
由于传统的下垂控制在系统运行过程中未考虑线路的阻感比,在不同电压等级的系统中对应不同的阻感比,如表1所示,电网线路的阻抗参数表。在低压线路中,系统的阻感比相对较高,并且逆变器到网侧的距离不确定,将会导致线路阻抗远大于感抗,因此传统的下垂控制不足与满足微电网的灵活控制要求。

表1 典型的电网线路阻抗参数表
因此,低压微电网在运行过程中不能够忽略线路阻抗的影响,有功与无功功率之间存在耦合关系,基于这一特性将微电网等效成为含有微源的简化模型,如图6示,其功率传输的向量关系如图7示。
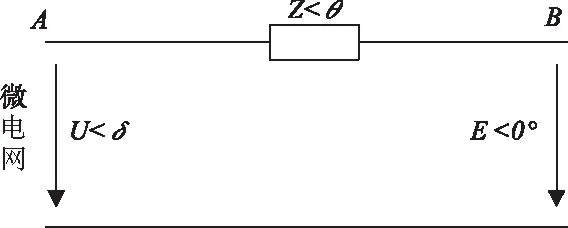
图6 下垂控制简化模型

图7 功率传输向量图
因此,从简化后的数学模型可以看出,当系统运行在感性线路(X≫R)和功率角较小的情况下,系统的有功功率主要取决于功率角δ和频率f,无功功率主要取决于系统的压降U-E。通过PQ的耦合调节控制系统的电压幅值和功率角。基于上述原理可以推导出在考虑阻感比的条件下,下垂控制的表达式为

(13)
式中,r式逆变器线路的阻感比(r=R/X)。
4 并网控制电路设计
4.1 并网预同步控制设计
微电网在并网运行模式下,其电压的幅值与频率由交流主电网提供。本文提出基于下垂控制并网预同步控制策略的电压幅值和频率与主网的预设值保持一致,当微电网内出现负荷波动时,主要由电网进行调控,并网逆变器输出保持稳定。但是,传统的并网逆变器在运行时,主要采取V/F和P/Q控制方式,离网与并网切换时需要改变对应的控制策略,可能会出现电压幅值和频率不受控制,并且孤岛运行时电压幅值和频率与并网时发生了偏离,直接并网运行可能会产生较大的冲击电流,造成并网事故。因此,基于图4并网控制电路图,提出预同步控制策略,使得微网电压幅值和频率与主网同步,实现安全并网。提出的基于下垂控制并网逆变器的预同步控制框图,如图8所示。
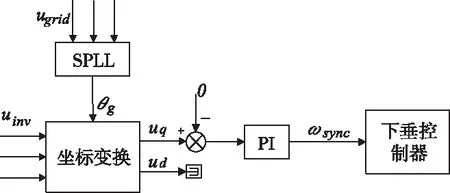
图8 并网与同步控制框图
微电网的输出电压与主网电压是以一定的角度进行旋转,需要通过控制逆变器的输出电压矢量,利用典型的同步坐标系软件锁相环(SPLL),对电网频率、相位和幅值进行检测,从而实现对电网电压的锁相。其中电网电压为ugrid,使用第二节推导的三相电压源型逆变器的坐标变换数学模型,通过Clark和Park变换,得到两相旋转坐标dq的向量值,其变换示意图如图9所示。
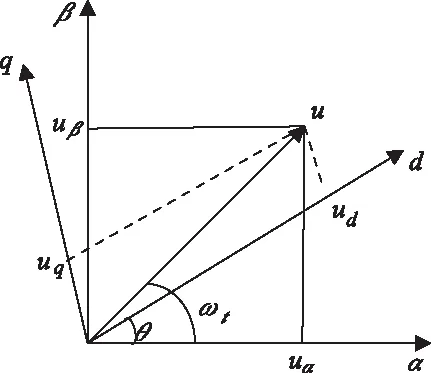
图9 坐标变换示意图
将坐标系中q轴的分量与对应的参考值做差,经过PI控制调节相角频率的修正值,与预设值相加后,即为电网相角频率,通过积分器得到电网的相角值,频率相位同步控制系统框图如图10所示。

图10 频率相位同步控制系统框图
图10所示,Uoa、Uob、Uoc是电压源型逆变器的输出电压,基于电网的相角值θg作为参量,通过Park变换得到dq两相坐标系下的等效电压值Uod和Uoq,其相位与电网电压相位存在相位差,Park变换所得的q轴分量是一个常数,其值作为逆变器输出电压与主网的相位差值;如果坐标变换后得到的q轴分量为0,则说明逆变器输出电压与主网之间不存在相位差。根据以上两种状态,以0为参考量与q轴上的分量Uoq做差,将得到的差值经过PI控制调节获得并网角频率的补偿值ωsync,从而调节并网逆变器输出电压的相位和频率,实现并网时逆变器输出值与主网的相位和频率保持同步。
4.2 LC滤波器建模
根据本文设计的三相电压源型逆变器结构控制电路图可知,使用SPWM对逆变器的输出电压调制,在开关频率处将会产生低次谐波振荡,因此使用LC滤波器进行滤波,根据以下数学公式可以对滤波器的参数进行设计优化,其设计原则一般为[11]

(14)
其中
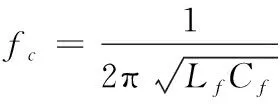
(15)
在式(14)、(15)中:fc是滤波器的谐振频率,fs是脉宽调制的载波频率,fn是微电网频率。为了抑制滤波器出现的低次谐波振荡,在滤波电容上串联了阻尼电阻,有控制电路图可知,LC滤波器输入电压与输出电压之间的关系式为

(16)

4.3 参考电压合成
通过预同步控制器对并网相角频率的调制优化,设计一种采用频率代替相角控制逆变器的输出电压,其控制框图如图11所示。其中,P、Q为电压源逆变器输出的有功功率和无功功率,E0为微源输出无功功率为0时的电压幅值,Pn是额定频率下微电源的输出功率,f0是主电网的额定频率。
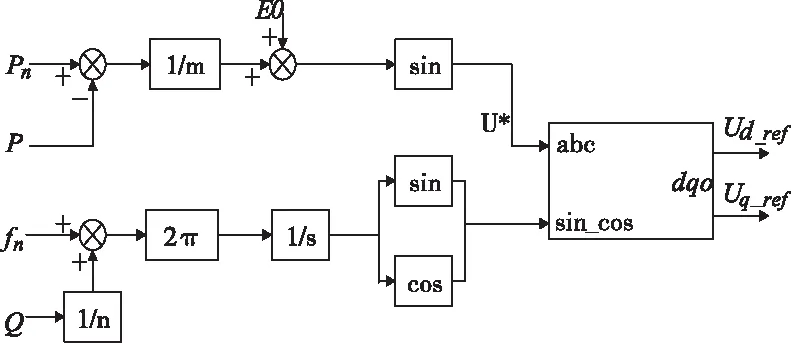
图11 参考电压合成控制框图
其中,微电源输出的无功功率P和有功功率Q必须满足0≤P≤Pmax,-Qmax≤Q≤Qmax两个条件[12]。上图中,逆变器侧输出的电压幅值频率为

(17)
参数m、n分别为有功和无功的下垂系数,根据式(17)可得

(18)

图12 电压频率下垂特性

图13 系统仿真模型
式中,Pmax是逆变器频率下降到最大时系统允许输出的有功功率,Qmax是逆变器电压幅值下降到最大时系统输出的无功功率,fmin是逆变器输出功率最大时系统的频率,Emin是系统电压允许的最小幅值。其控制基本原理图如图12所示。
5 仿真分析
基于图4所示的三相电压源型逆变器控制电路的拓扑结构,在MATLAB/Simulink仿真平台上搭建了如图13所示的系统仿真模型,以此验证文章提出的控制策略。系统的控制参数见表2。

表2 系统参数
为了验证系统在实际运行环境下控制策略的有效性,在微电网中设计了两个负载,系统在0~0.6s运行时,直接入负载1,断开负载2;在0.6~1s运行时,负载1和负载2同时接入;其中,利用阶跃信号控制开关断路器的通断。为了验证微电网由孤岛运行模式切换到并网运行模式的过程,通过设计开关断路器的控制状态,微电网在0~0.4s时运行在孤岛模式,在0.4s时微电网切换至并网运行,从而实现微电网的平滑切换控制模式。其仿真结果如图14所示。
图14所示,利用本文所提的控制策略,微电网系统运行在不同模式下的运行结果。图14a是系统运行时的频率响应,反映了系统在孤岛与并网切换时,微网的频率与电网同步运行;图14b表明微源在负载变化和并网时,其输出的有功功率和无功功率的变化情况,可以看出,利用该控制策略提高了并网效率;图14c反映了系统在运行时电流的变化情况,当运行模式切换时,系统能够保持稳定运行;图14d和图14e表明了并网侧电压相位的始终保持稳定,其幅值有所下降。因此,通过以上运行仿真结果,反映了本文设计的控制策略能够达到微电网的并网效果,实现不同模式的平滑切换。
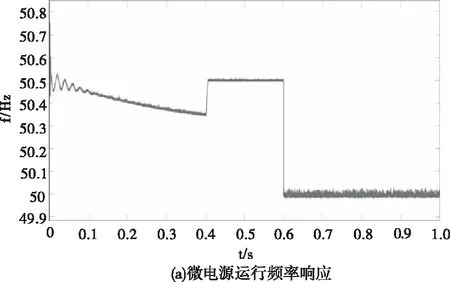

图14 微电网运行时输出响应曲线
6 结论
本文通过分析微电网在不同运行模式之间切换时存在的谐波震荡问题,设计了一种基于下垂控制的三相电压源型逆变器并网预同步控制策略,首先,分析了三相电压源型逆变器的工作特性,建立空间坐标系简化逆变器的控制策略;其次,通过分析传统的下垂控制存在的不足,通过改进系统的控制电路,优化了微电网运行的控制策略,并设计了一种相位频率同步控制系统,解决了并网时输出电压与电网电压之间不同步的问题;最后,基于MATLAB/Simulink仿真平台,搭建了所提控制策略的仿真模型,结果表明微电网在孤岛运行模式向并网模式切换时,能够与电网电压的频率相位保持一致,实现微电网不同模式间的平滑切换。仿真验证了本文所提控制策略的可行性和有效性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
装备维修技术(2022年7期)2022-07-01
内燃机与配件(2022年2期)2022-01-17
语数外学习·高中版中旬(2021年11期)2021-02-14
电机与控制学报(2018年9期)2018-05-14
考试周刊(2018年15期)2018-01-21
中国新技术新产品(2018年22期)2018-01-05
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
筑路机械与施工机械化(2016年12期)2017-01-13
