基于云和高斯过程的网联车辆协同式道路参数估计
2022-05-13 05:17:40LIZhaojianHAJIDAVALLOOMohammadXIAXinZHENGMinghui
同济大学学报(自然科学版) 2022年4期
LI Zhaojian,HAJIDAVALLOO Mohammad R,XIA Xin,ZHENG Minghui
(1.密歇根州立大学机械工程学院,东兰辛 48824;2.加利福尼亚大学洛杉矶分校交通与环境学院,洛杉矶 90095;3.布法罗大学机械与航空航天工程学院,布法罗 14260)
Road profile is one of the most important road characteristics that has been frequently used(or proposed to be used)to improve suspension control[1-2],enable comfort-based route planning[3],and alert road agencies for maintenance. Road profilers have been conventionally used to measure road profile.However,they are costly to acquire and maintain and can provide limited coverage.Alternatively,with great advances in vehicular telematics,various sensors and communication modules are deployed in modern vehicles,which can potentially be exploited for road profile estimation.Vehicles can thus be used as mobile sensors to crowdsource road information with great road coverage[4-7].
For instance, vehicle-based estimation approaches have been extensively pursued to exploit the onboard measurements along with the underlying dynamics to reconstruct the road profile[2,8-14].These approaches can be categorized into two classes:unknown input observer(UIO)-based and extended state observer(ESO)-based.The UIO methods generally aim to obtain a precise and stable model inverse to estimate the road profile(which is the input)from the outputs of the system[8-9].On the other hand,the ESO methods exploit an augmented state by treating the road disturbance signal as an additional state,which is estimated along with the original states using the commonly used state observers such as the Kalman filter(KF)for linear systems and high gain observers(HGO)or extended KF(EKF)for nonlinear dynamic systems[2,10-14].
However,despite the above progresses,these approaches are based on a single-vehicle setting,which is thus susceptible to model uncertainty and measurement errors.To address these challenges,in this paper,a new collaborative estimation framework is developed that exploits multiple heterogeneous vehicles to iteratively improve the estimation.The proposed approach utilizes the cloud as a central platform to crowdsource local vehicle estimations using Gaussian processes (GP)[15]. The crowdsourced GP is then sent back to the vehicle as a pseudo-measurement to enhance onboard estimation using a KF.The enhanced local estimate is then uploaded to the cloud to update the GP.More specifically,each participating vehicle runs a local KF-based ESO for simultaneous vehicle state and road profile estimation.Instead of just using the available onboard measurements,a crowdsourced“pseudo- measurement”from prior participating vehicle estimates is used to enhance the local estimation.Two types of pseudo-measurements are considered where in the first case each vehicle uses the previous estimation of the vehicle as the pseudomeasurements whereas in the second case,a trained GP from all prior participating vehicles are used.Both cases are compared with a benchmark to demonstrate the superior performance.
This proposed framework is novel as it systematically exploits the estimates from multiple heterogeneous vehicles to both iteratively enhance onboard estimation and collaboratively refine crowdsourced road profile,through the seamless integration of individual local estimators with the cloud-based Gaussian processes.First,the model dynamics and KF design is introduced.Then,the cloud-based GP regression is investigated whereas the recursive on-board estimation using pseudomeasurements for KF is discussed. Finally,extensive simulation results are expounded.
1 Problem formulation
The aim of this paper is to develop approaches to efficiently crowdsource road profile from multiple heterogeneous vehicles.Specifically,given a road segment(e.g.,defined by two consecutive road mile markers[16])as illustrated in Fig.1,the objective of vehicle-based road profile estimation is to use existing onboard sensors(e.g.,accelerometers,GPS,yaw rate,and roll rate)to discoverw(s),the road elevation as a function of distance in the longitudinal direction(thesdirection in Fig.1).Here it is assumed that the road profile is uniformly distributed in the lateral direction(ndirection in Fig.1).By scaling the distanceswith the vehicle speed,the road profile to be estimated can also be represented byw(t),a function of time.Consider the following dynamics that characterizes the underlying vehicle-road interaction:

Fig.1 A road segment with profile denoted by w(s)

wherex1,x2,x3,andx4represent the sprung mass displacement,sprung mass velocity,unsprung mass displacement,and sprung mass velocity,respectively(see Fig.2).Herew∈R is the road disturbance signal,which can be modeled as the output of a lowpass filter whose input is a white Gaussian noise with unit intensity,i.e.ẇ=aw(t)+be(t)whereaandbare some constants as defined in[17].

Fig.2 Illustration of a quarter-car suspension model
Thus,by augmenting the road signalwas an additional state,i.e.,Eq.(1)can be rewritten into the following augmented state-space model

whereA,G,andCare appropriate matrices derived from Eq.(1);ηis the white Gaussian noise;andyis the noisy output measurements.Discretizing the system with an appropriate sampling time yields the following discrete state space equations:

which can now be used in a KF to estimate the augmented state which includes the road disturbance signal by the following two steps:
Prediction:


The above description is a standard ESO design and will serve as a benchmark to compare with the developed collaborative estimation method which will be discussed next.
2 Cloud-based Gaussian process regression
In Section 2,road profile estimation with a single vehicle using ESO is presented.In this section,a cloud-based collaborative estimation framework is developed to iteratively refine the estimates from single vehicles.The considered GPbased collaborative road profile estimation framework is illustrated in Fig.3.Specifically,each participating vehicleireceives a Gaussian process(GP)GPi-1(mi-1(s),Ki-1(s,s′)|Θ̂i-1)with a mean functionmi-1(s) and a kernel functionKi-1(s,s′)parameterized byΘ̂i-1,from the cloud.The GP model describes the road profile distribution(with both mean and covariance),aggregated from the data of prior participating vehicles until vehiclei-1.The receivedGPi-1(·,·|Θi-1)is then utilized as a priori“pseudo-measurement”of the road profile,forming an augmented output along with the onboard measurements asyˉ=[y;ŵi-1], whereŵi-1~GPi-1(·,·|Θi-1).This augmented output is then incorporated into a local estimator(e.g.,KF or JDP-based estimator)to estimate the augmented state(both vehicle state and road profile).This GP“pseudo-measurement”can be viewed as an additional sensor measurement,providing both the means and the covariances of the road profile to be fused with onboard sensors for enhancing the local estimation.The pair of road profile and position estimate sequence,(ŵi,ŝi):={ŵi,ŝi}Ni i=1is then uploaded to the cloud to update the GP hyperparameters using e.g.,maximum likelihood learning:

Fig.3 Schematics of collaborative estimation using GP

The updated GP with hyper-parametersΘ̂i,GPi(·,·|Θi)is then sent to the next participating vehiclei+1 to enhance its estimate.The process is then repeated.
In the presented framework,Nnumber of vehicles are considered which can collaboratively improve the estimation of the road disturbance signal from vehicle to vehicle.When Vehicleipasses the considered road segment,it will pass its KF estimation information of the road disturbance signal to the cloud which has the capability of storing large data structures and dealing with heavy computations.On the cloud side,the road profile estimations of Vehicleiand all prior participating vehicles are used to fit a GP to characterize the road disturbance.The goal is that as more vehicles collaborate in the proposed estimation framework,the estimation error for the cloud-based GP and for the vehicle on-board estimation is reduced. Next,more details are provided regarding the GP and the collaborative estimation framework.
The road profile can be described by a function of the spatial distance,w(s),or characterized by its power spectrum density[18]. An alternative description is from a machine learning perspective using the GP model [19] , i. e.,w(s)~GP(m(s),k(s,s′)),wherem(s)=E[w(s)]is the mean function that can take the form ofm(s)=whereψ(·)is the vector ofKbasis functions(e.g.,polynomial functions or Gaussian basis functions),andβis the vector of corresponding linear weights to be trained from the data. The kernel function,k(s,s′)=Cov(s,s′),characterizes the covariance between any two spatial pointssands′, an example of which is the

In this paper,GP is used to predict and update the spatial function values of the road disturbance signal for a considered road segment. More specifically,Vehicleipasses the considered road segment and sends its KF estimation pointsto the cloud,where(ŝi,ŵi)is the sequence of the estimated road signal points.Gathering all the estimated values for the road signal up to Vehiclei,the training data points for the cloud-based GP will beD={(ŝ1,ŵ1),(ŝ2,ŵ2),...,(ŝi,ŵi)}. In this regard,the input and output training data matrices can be written by stacking the data points obtained by each KF for Vehicle 1 to VehicleiasŜ=[ŝ1,ŝ2,...,ŝi]andŴ=[ŵ1,ŵ2,...,ŵi]respectively.The objective is to approximate the nonlinear mapping of a system

With the tuned hyperparameters of the kernel and mean function,predictions can be made by posterior inference conditional on observed dataD.Using these information,the predictive equations for theith GP regression at pointss*follow as

The proposed cloud-facilitated collaborative estimation with GP has several advantages.First,it works for heterogeneous vehicles as the framework has no requirement in vehicle homogeneity.Each vehicle exploits its own model and an estimator for local estimation. Second, the “pseudomeasurement”scheme is guaranteed to reduce the estimation variance from iteration to iteration thanks to the posterior covariance reduction update in KF[20].Finally,as the only information regarding road estimate is communicated,privacy-sensitive information such as vehicle states are inherently protected.The GP crowdsources the estimates from multiple vehicles to iteratively improve the road profile estimation,which is then shared with participating vehicles to enhance its onboard state and road estimation.
3 Cloud-assisted onboard estimation with pseudo-measurements
In this section,the idea of pseudo-measurement from the cloud as an additional measurement is presented to enhance the local estimation performance.In particular,two types of pseudomeasurements are considered.The first is to use the KF from the last vehicle as the pseudo-measurement while the second is to use the crowdsourced GP as the pseudo-measurement.
3.1 KF pseudo-measurements
When Vehicleipasses a road segment,the KF for Vehicleiuses the KF estimation of Vehiclei-1 as extra measurements i.e.,the outputyfor Vehicleiwill be modified as

The modification of the output of the KF for Vehicleiresults in the modification of the KF algorithm as well.That is,a new measurement noise covariance for Vehicleiis defined by taking account of the variance of the road signal estimation error of the prior Vehiclei-1 at each time step.This can be formulated as a KF with augmented pseudomeasurements as
Prediction:

whereCˉandRˉare the modified output matrix and modified measurement noise matrix respectively,i.e.

andσ2ŵi-1(k)stands for the variance of the road disturbance signal estimation error of the KF for Vehiclei-1 at the time stepk.This recursive scheme will lead to a better estimation of the road profile as each vehicle travels the road segment as shown in the simulations.
3.2 GP pseudo-measurements
In this case,the KF for each vehicle will incorporate the information of the latest GP regression as the pseudo-measurements for the road profile estimation purpose.Specifically,the output measurement for Vehicleiis modified as

Similarly,the KF for Vehicleiwill be augmented with GP pseudo-measurements as the previous case,whereRˉin this case is equal to
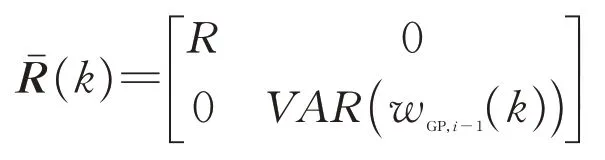
whereVAR(wGP,i-1(k))stands for the variance of the road disturbance signal estimation error obtained by the latest GP regression done at the cloud at iteration numberi-1.In Section 5,how these two types of extra measurements will lead to better performance of the on-board KFs in each vehicle will be demonstrated. It is noted that the proposed framework will still work if a nonlinear plant model is used.In this case,instead of using KFs,nonlinear observers such as EKFs and high-gain observers can be used for local estimations.
4 Simulation
In this section,simulation results for the proposed collaborative estimation framework are presented. Specifically,N=5 heterogeneous vehicles with different model parameters are considered.The parameter values for constructing theAandGmatrices in Eq.(2)for each vehiclei=1,…,Nare

which corresponds to the measurements of sprung mass displacement and suspension deflection that are available in(semi-)active suspension systems.
In the simulations,all participating vehicles travel through a road segment of 5m in length at the same speed.This results in the correspondence of the estimated points of each vehicle obtained by the KF algorithm.The actual road profile was generated based on a Class-C road[17].The measurement noisevifor each vehicle is generated in a way that the signal-to-noise ratio is between 10 and 20.For the cloud-based GP,the initial GP prior is defined with a zero mean function and squared exponential(SE)

In this equation,the hyperparameterσ2fstands for the signal variance or the vertical scaling factor whereas the hyperparameter is known as the horizontal scaling factor.In other words,the distance that is needed to move along the specified axis in the input space so that the function values become uncorrelated[21].The parameterris the distance measure of the inputs and equals tor=|si-sj|[22].
For the GP regressions,there are 3 approaches to calculate Eqs.(8)and(9).The first approach is that,for theith GP,all the estimation data of the KF up to vehicle numberiis used as the training points and then the posterior is inferred given all the collected data.The second approach is to similarly collect all the data up to Vehicleibut instead use a sparsity approximation GP approach.The last one is to use an updating recursive approach[6]where for the new arriving data,the GP will infer the posterior distribution given all the previous data without taking account of all the collected data to construct the matrices in Eqs.(8)and(9)which will cause a heavy computational burden if there are a lot of training data points.In this preliminary study,the first approach is used as the number of considered vehicles are small and the implemented approach does not impose heavy computational burden. Other approaches will be considered in the future.
The performance of the proposed recursive KF for Vehicles 1 to 5 when exploiting the KF pseudomeasurements from the prior vehicle is compared with the benchmark case,i.e.,without using the pseudomeasurements.The results are shown in Figure 4a and it is clear that using this extra measurement can reduce the root mean squared error(RMSE)of the estimated road profile.This extra measurement is helpful for the KF algorithm to have a better estimation in general and the variances of the estimation error decreases from vehicle to vehicle.Fig.4b shows the mean and variance of the road profile estimation error when comparing Vehicles 1 and 5,which shows that a lower mean and variance is achieved in the last vehicle(Vehicle 5)as compared to the Vehicle 1.
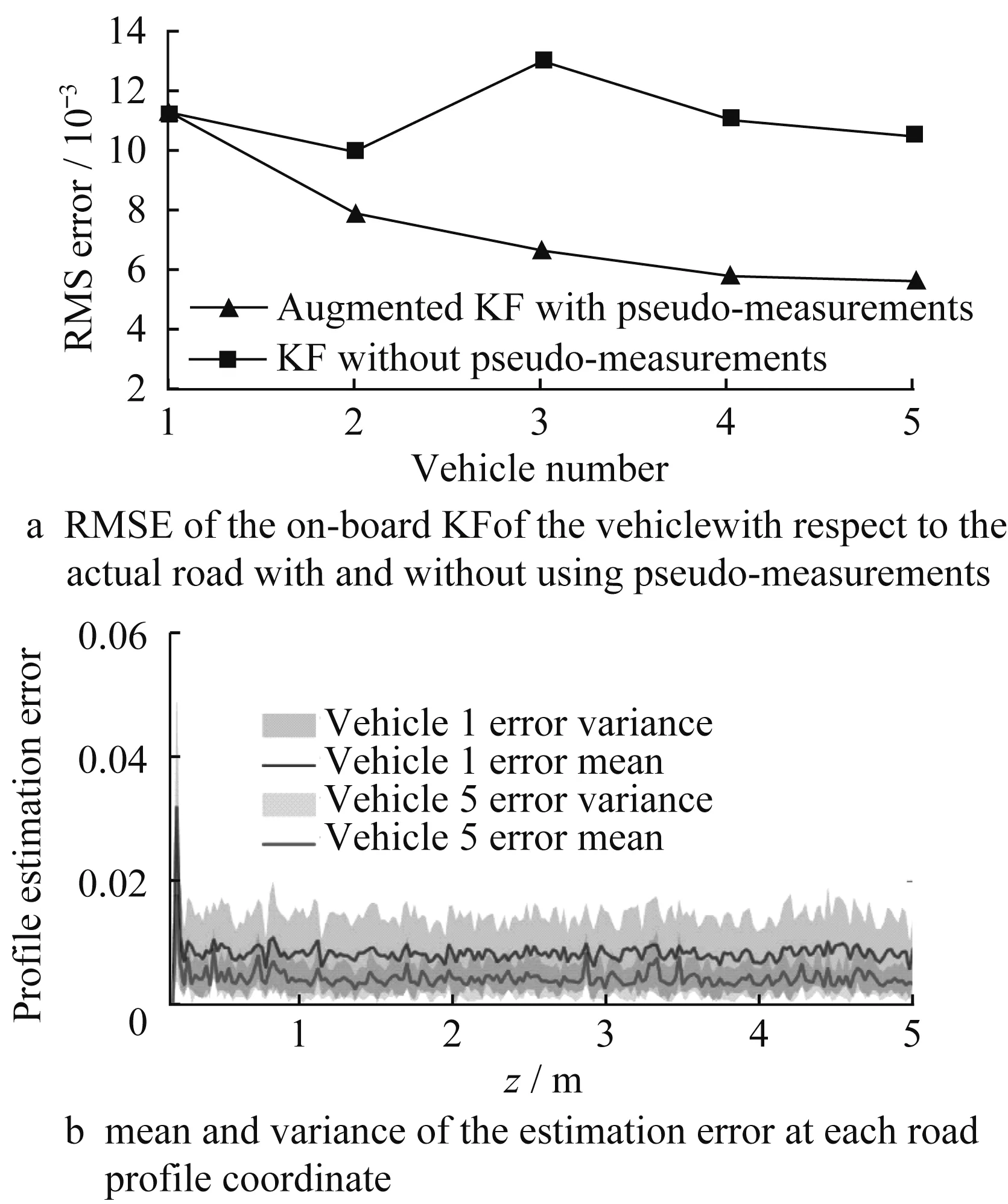
Fig.4 Onboard estimation performance estimation
Fig.5-Fig.7 summarizes the performance of the pro-posed recursive KF when exploiting the latest GP pseudo-measurements as pseudo-measurements.Fig.5 is a comparison of the GP pseudo-measurement case and the benchmark setting where each vehicle performs the KF without using the pseudo-measurements.It is clearly observed that using pseudo-measurements brings about a superior performance.For the KF using pseudomeasurements,after Vehicle 4 the error does not decrease much.This is due to the fact that after certain number of vehicles,the GP will fit a curve to the road profile which has a low variance and the next KF(that is,the KF for Vehicle 5 which uses the GP pseudomeasurement)will be more likely to trust the latest GP pseudo-measurement rather than the process dynamics.Going one step before,on the GP side,this is the result of using the training data points originated from the previous KFs augmented with GP pseudomeasurements.This iterative use of the information of GP for the KF estimation of road profile and the use of GP of the estimation of KF,is the reason that eventually both KF and GP predictions converge to a single road profile and the improvement will be halted.Ongoing research is on the development of new ideas to enhance the current result.

Fig.5 RMSE of the on-board KF of the vehicle with respect to the actual road with and without using pseudo-measurements
Fig.6 is a comparison of the first cloud-based GP regression and the last one.In addition to reduction of the variance from the first to the last vehicle,the improvement of the mean function,which is the prediction of the GP of the road profile,is significant.In Fig.7,the cloud based RMSE of the GP regression with the actual road profile for GP fit numberiis compared with the average of KFs up to Vehiclei,used as a benchmark.The results show a clear superiority of the GP regression,resulting in a lower RMSE of road profile for all vehicles.

Fig.6 First and last GP regression
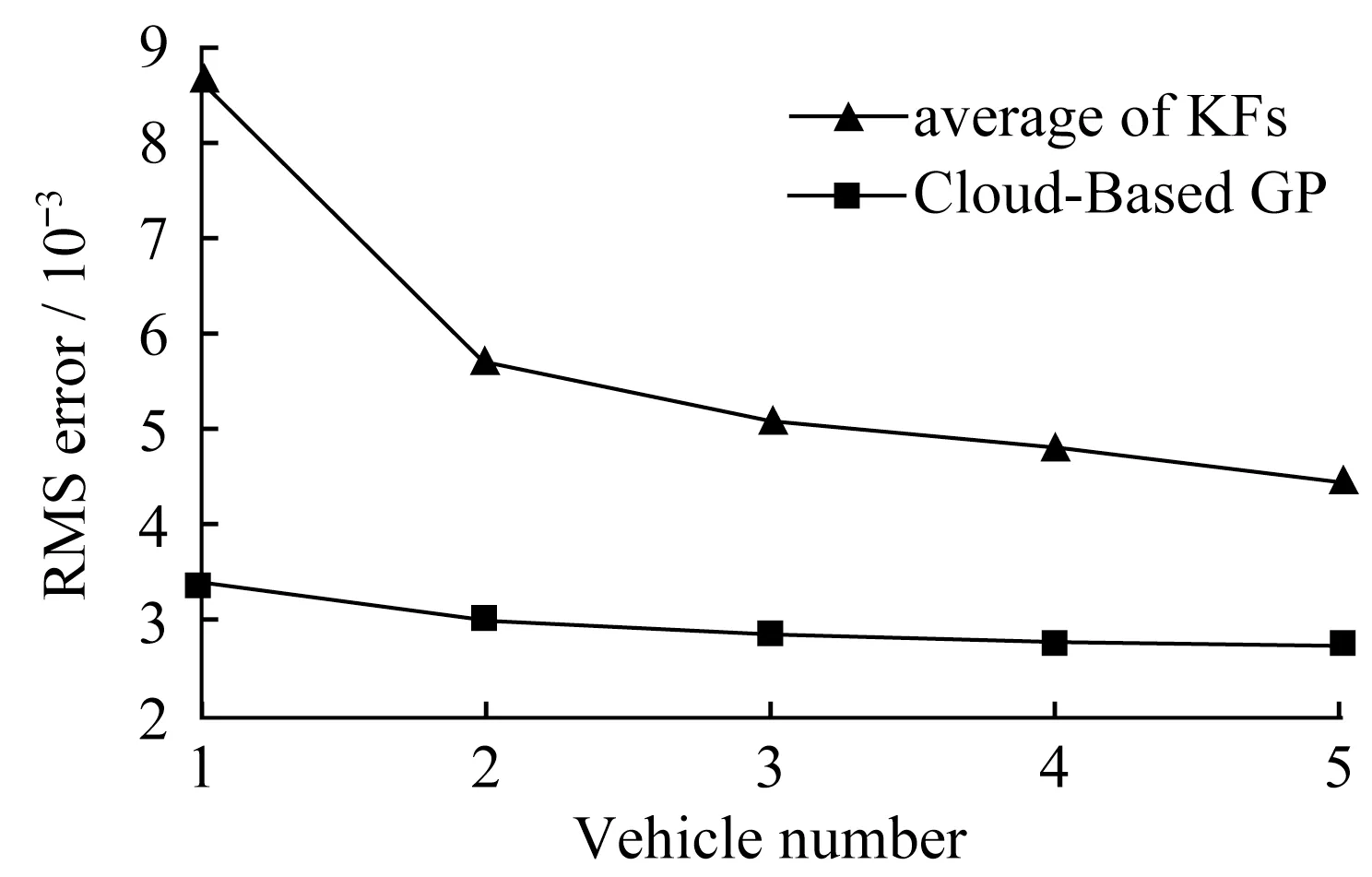
Fig.7 Comparison of the cloud-based GP and the benchmark setting
5 Conclusion
In this paper,a novel cloud-based collaborative road profile estimation framework using multiple heterogeneous vehicles was developed.GP was used to crowdsource individual estimates,which was then used as pseudo-measurements for future vehicles to enhance its local measurements. This pseudomeasurement was able to greatly enhance the local estimation performance. The enhanced local estimation was then uploaded to the cloud to update the GP estimation.Future work will focus on dealing with GPS imprecision and data-efficient GP to make this framework more practically viable.
作者贡献声明:
LI Zhaojian:Conceptualization,Supervision,Writing-review&editing.
HAJIDAVALLOO MOHAMMAD R:Formal analysis,Software,Writing original draft.XIA Xin:Discussion,Writing-review&editing.ZHENG Minghui:Discussion,Writing-review&editing.
猜你喜欢
——以广西现代职业技术学院为例
教育观察(2022年20期)2022-08-16 12:13:22
现代职业教育·高职高专(2022年16期)2022-05-05 03:44:13
河北画报(2020年10期)2020-11-26 07:21:22
广西文学(2018年11期)2018-11-13 02:56:59
现代电子技术(2018年7期)2018-04-04 09:10:16
中国科技博览(2017年18期)2017-07-01 01:33:25
长沙民政职业技术学院学报(2016年2期)2016-05-17 05:21:34
新教育时代电子杂志(学生版)(2015年31期)2015-12-20 08:28:20
党的生活·党员电教与远程教育(2015年7期)2015-08-06 20:41:25
长江师范学院学报(2015年6期)2015-02-27 10:30:55