空间近邻影响下建筑工人不安全行为传播仿真
2022-05-13 04:43马辉,吕航
土木工程与管理学报 2022年2期
马 辉, 吕 航
(天津城建大学 经济与管理学院, 天津 300384)
在全球范围内,建筑业都是一个高危行业,其安全事故发生以及人员伤亡数量长期位居榜首[1]。Heinrich指出人的因素是引发安全事故的主要原因[2]。我国建筑业属于劳动密集型行业,有限理性的工人个体更容易受到所处群体环境的影响[3]。如果管理不善,不安全行为极易在工人群体中传播。因此研究不安全行为在工人群体中的传播规律,探究哪些因素和条件可以抑制不安全行为传播,对于减少工人不安全行为、降低安全事故发生概率具有重要意义。
近些年,国内外学者对行为传播开展了大量研究。研究发现,行为传播存在示范模仿和感染从众[4,5]两种方式。传播过程主要受个体自身影响力[6]、个体易感度及意见领袖[7]、核心区域建筑工人[8]以及社会网络结构[9]等因素影响。王新华等[10]结合煤矿系统的特点,提出SIRS矿工不安全行为传播模型。田水承等[11]基于社会网络理论及SIR模型构建了矿工不安全行为传播模型,指出网络聚集系数对不安全行为传播有较大影响。
上述研究多基于社会网络理论,缺乏对工人决策复杂性及行为可观察性的考虑,同时忽略了空间位置关系对行为传播的影响。由于建筑工人的岗位比较固定,一定时间内其在施工现场的空间位置较少发生改变,相邻工友更易成为工人的观察与学习对象[12]。因此,本文考虑空间近邻的影响,研究工人个体的观察、比较、模仿过程,构建工人个体行为的学习函数,刻画工人个体的行为决策变化过程,进而利用元胞自动机建立工人群体不安全行为传播模型,拟通过模拟微观工人个体的简单学习行为,观察工人群体中涌现出的不安全行为传播规律。
1 空间近邻影响下的建筑工人行为学习分析
1.1 工人行为的社会学习过程
根据班杜拉的社会学习理论,个体行为社会学习的主要方式是观察学习,动机强化则贯穿始终[13]。在施工现场面对不确定性时,工人通常观察身边工友的行为策略及相应结果,并与自身进行比较。若他人行为收益高于自身所得,工人个体就会增加模仿工友行为的倾向。如改变行为后获得了与工友同样的收益,该行为则会进一步得到强化。纵观整个社会学习过程,收益的比较是工人个体产生行为学习的动机,对不安全行为的传播起到了关键作用。
1.2 工人行为策略的价值感知
大多建筑工人在行为决策时表现出有限理性的特征,其对不同行为策略的比较受到主观价值感知的支配。工人个体对不同行为策略的得失感知如式(1)所示[14]。
V=∑π(pi)v(Δxi)
(1)
式中:π(pi)为决策权重函数,表示对事件i发生概率pi的主观认知,且π(0)=0,π(1)=1;v(Δxi)为基于参照依赖效应的感知价值函数,Δxi表示的是事件i发生时行为主体获得的实际收益x与参照点x0的差值。v(Δxi)和π(pi)的取值函数如式(2)(3)所示。
(2)
(3)
式中:α,β为风险偏好系数;λ为损失规避系数;π+为面对收益时的决策权重函数;π-为面对损失时的决策权重函数;γ,δ为决策影响系数。本文中,pi为工人观察到某位工友的概率,设工人邻居个数为L,则pi为1/L,Δxi为该工人与工友的收益差值,并根据Kahneman和Tversky的研究标定,选取α=β=0.88,λ=2.25,γ=0.61,δ=0.69[15]。
1.3 工人个体的行为学习模型
在现实生活中,个人的行为倾向也受互动范围内多数人行为的影响[16,17]。因此,结合上述分析,本文构建出工人个体的行为学习模型,如图1所示。
为便于研究实验,将工人的行为策略抽象为安全行为和不安全行为。若工人采取安全行为,会带来确定的稳定收益e;若工人采取不安全行为则能够以提高绩效、节省时间及体力等方式获得收益s,且s>e。采取不安全行为在带来较高收益的同时也会增加相应的风险,即有ξ的概率会发生安全事故,造成相应损失n,有η的概率可能被监管者发现,被处以m的罚金。

图1 建筑工人行为学习模型
在群体环境中,工人分别与可观察到的每一位工友进行比较,利用式(1)计算出工人对该策略的心理感知价值V,反映建筑工人对当前行为策略的总体满意度。如果工人对自身行为策略不满意,将产生行为学习动机。此外,工人处于群体中,同样会受从众心理影响。根据费米函数结合从众系数,建筑工人将以速度p学习身边工友中的最优策略,如式(4)所示。
(4)
式中:K为噪声参数;ω为从众系数,其函数式如式(5)所示。
(5)
式中:N为邻居中状态与工人不同的个数;H为噪声参数。K,H均用于刻画个体的非理性因素。
2 建筑工人不安全行为空间演化模型构建
2.1 基于元胞自动机的空间演化模型
根据元胞自动机的基本原理,本文将建筑工人行为空间演化传播模型设置如下:
(1)元胞:一个元胞代表一位建筑工人,其在网格空间中的位置由一个有序对(i,j)(i,j=1,2,…)来表示。
(2)元胞空间:本模型将空间定义在一个二维空间中,采用20×20的正方形网格作为建筑场地。为研究方便,本文定义空间边界为周期型。
(3)元胞状态:根据本文的研究选取元胞具有“安全行为”与“不安全行为”两个基本状态,分别用0,1来表示。“安全行为”状态元胞用绿色表示,“不安全行为”状态元胞用红色表示。
(4)邻居:元胞的邻居指某一元胞在更新状态时需要搜索的空间范围。二维元胞自动机的邻居主要有Von Neumann型、Moore型及扩展Moore型[18],如图2所示。

图2 元胞邻居取法示意
(5)演化规则:根据工人行为学习模型,其演化规则为:t=0时,设定建筑工人群体中状态为1的元胞比例为l,则状态为0的元胞比例则为1-l,两种状态的元胞随机分布于网格中的各个位置;t时刻,处在(i,j)位置的元胞做出一种行为决策获得收益,同时观察身边工友的收益并计算心理感知价值V。对于元胞(i,j),若V≥0,则t+1时刻,处在(i,j)位置的元胞继续维持当前状态;反之则元胞(i,j)以p的概率改变自己的行为,本文K取值为0.1,H取值为0.3[16]。
2.2 初始化仿真模型构建
本研究利用MATLAB R2016a版本编写建筑工人不安全行为空间演化传播模型的仿真程序,并根据已有文献的研究及工程项目的实际情况,对模型参数进行初始化赋值。初始采用Moore型邻域,由于工人对危险的敏感性普遍较低,对不安全行为带来的收益以及节省的时间、体力等有较为乐观的预估,因此将工人采取安全行为的收益e预设为15,不安全行为收益s预设为30。根据Heinrich的统计,每发生300次违章行为会导致1次安全事故,故设定安全事故发生概率ξ取值为1/300。设定不安全行为初始比例l为1%。选择不同的监管力度η、不安全行为处罚m、事故损失n,进行仿真实验(t=200步)。将运行仿真程序所得结果与现实世界的不安全行为传播一般规律进行拟合,选择与现实规律拟合度最好的参数:监管力度η=0.1,罚金m=10,事故损失n=200。其仿真结果如图3所示。
如图3所示,t=1,50,100,200时的面板快照直观反映了不安全行为在空间中的传播情况,曲线图则反映了不安全行为数量随时间的变化情况。可以看到,在监管力度不高的情况下,不安全行为由单个个体逐渐向外扩散,数量不断增加。这与实际的不安全行为传播演化情形基本一致,即本研究所建立的仿真模型能够较为真实地还原现实工地上工人不安全行为传播的过程,因此该模型可以用于进一步的研究探索。
3 仿真实验
3.1 工人社交范围对不安全行为传播的影响
本实验考察工人个体的社交范围对不安全行为传播的影响,即通过改变工人的作用邻域,探究社交范围分别为较小、中等、较大时,群体中不安全行为传播的演化情况。本实验用Von Neumann型邻域、Moore型邻域以及扩展Moore型邻域分别代表较小、中等以及较大的社交范围,根据三种不同的邻域模型对基础仿真模型进行调整,分别运行仿真程序后,演化结果如图4所示。

图3 初始模型示意

图4 不同邻域下不安全行为传播演化结果
由图4可见,在Von Neumann型邻域下工人群体间行为传播的速度最快,传播范围也最广;而扩展Moore型邻域下选择不安全行为的工人数量则得到了有效控制。从而得出,作用邻域的扩大对不安全行为的传播存在一定抑制作用。究其原因,工人行为策略的改变受感知收益与从众心理的共同作用,社交范围的扩大影响了个体与邻居的相互作用,提高了满足工人改变行为决策条件的标准;同时工人获得的信息也更加全面,有利于他理性决策,因此不安全行为传播速度减缓。
3.2 意见领袖对不安全行为传播的影响
意见领袖相较于普通工友更易成为工人模仿学习的榜样。当工人身边存在意见领袖时,主要以他的收益作为自己的参照来判断收益。本文在空间内随机设定领袖元胞,考虑现实施工现场工人小组规模,本文仍以更为贴近现实的Moore型邻域为例,分别研究领袖元胞数量k=5,10,20,40时工人的群体间不安全行为传播情况,并与群体间无领袖元胞时的情形作对比。本实验设定领袖均受到过良好的安全培训,其初始行为状态均为安全行为,为更好地体现领袖在群体间对不安全行为传播的影响作用,设定不安全行为初始比例l为50%,演化结果如图5所示。

图5 意见领袖对不安全行为传播的影响
观察图5可以发现,意见领袖对工人具有正向引导作用。当群体间不存在意见领袖时,选择不安全行为的工人数量急速上升,不安全行为几乎覆盖了整个群体;当出现意见领袖时,选择不安全行为的工人数量有所下降,且随着领袖元胞数量的增加,群体间的不安全行为数量逐渐减少。当领袖达到40位时,选择不安全行为的工人数量出现明显减少并最终趋于稳定,可以看到,此时群体间的不安全行为传播现象已然被抑制住。
3.3 不安全行为处罚对行为传播的影响
本实验拟定4个监管方案进行实验模拟,比较不同方案下的不安全行为传播规律。为更好地体现不同处罚条件对于不安全行为传播的影响效果,取初始比例l为固定值50%,邻域形式同样选择Moore型。实验条件设计如表1所示。

表1 不同监管方案实验参数
实验结果如图6所示。
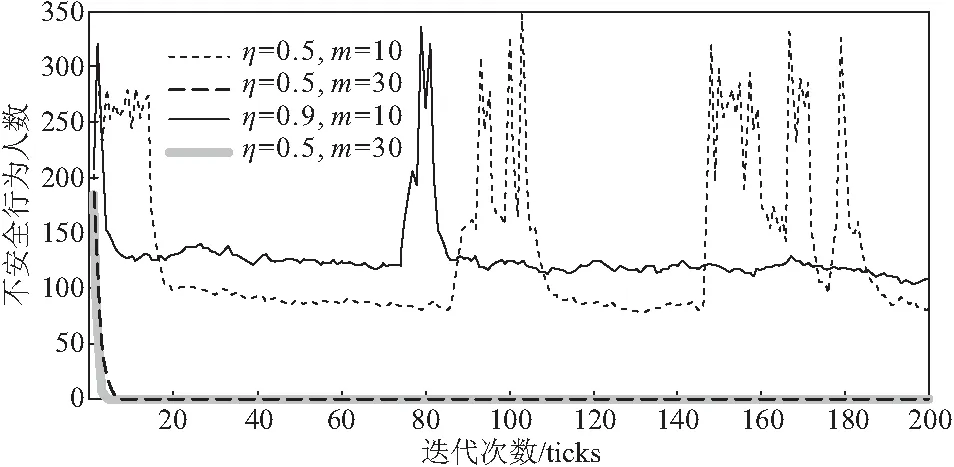
图6 不同监管方案下行为传播演化结果
观察图6所示演化结果,仅提高监管力度对不安全行为的传播影响较小,高额的罚款则对不安全行为传播起到了很好的抑制作用。而当高监管力度与高额罚款结合时,不安全行为纠正的速度更快。究其原因,是工人个体具有风险厌恶的特点,高额的处罚结合高强度的监管,让选择不安全行为的工人几乎失去了劳作一天的收益,在这样的情况下工人会厌恶不安全行为。
4 建筑工人不安全行为传播控制对策
从三组实验可以看到,严厉的安全监管以及高额的罚款对抑制不安全行为传播具有直接而有效的作用。然而,监管力度与企业的安全管理成本正相关,多数企业不愿承担高昂的管理成本。因此,除提高监管力度之外,企业还需采取低成本管理措施。
(1)扩大工人的社交范围。从作用邻域对不安全行为传播的影响来看,邻域的扩大能够有效减缓不安全行为传播的速度。因此,企业可以将不同班组的工人混编在同一宿舍,加大不同工组工人之间的沟通交流;还可以安排管理人员与工人同吃同住,增进工人与管理人员之间的沟通,提高安全管理效率。工作中,项目经理还可以合理扩大各施工班组的规模,增大工人工作交流范围。
(2)在固定的工作空间内发挥领袖的榜样示范作用。从意见领袖对工人群体的影响来看,如果领袖能够做出安全行为表率,该领袖所在工作空间的不安全行为传播就会得到有效控制。因此,施工企业首先应当做好施工人员的梯队建设,选择精技术、善管理且安全意识强的工人作为班组长,将班组内安全意识强的工人培养为技术骨干,树立意见领袖的权威。同时还应对组长定期进行考核,保证班组长这些关键少数发挥安全行为示范作用。
5 结 语
本文在提出建筑工人是有限理性经济人假设的基础上,考虑从众心理特征,剖析其在空间近邻影响下的社会学习过程,根据前景理论构建其对不同行为策略的价值感知函数,进而建立工人的行为学习模型,运用元胞自动机模拟空间演化过程的能力,模拟近邻空间中建筑工人不安全行为的传播扩散。根据仿真实验结果总结建筑工人不安全行为传播规律,并提出相应对策。
本研究还存在以下不足:构建行为决策模型时未考虑工人个体生理及心理方面的差异性,此外构建不安全行为传播演化模型时没有结合实际考虑建筑工地的群体密度,后续可以基于现有成果与结论开展更深一步的研究。
猜你喜欢
黄河之声(2022年6期)2022-08-26
农业工程学报(2022年7期)2022-07-09
逻辑学研究(2021年3期)2021-09-29
好日子(2019年4期)2019-05-11
扬子江诗刊(2018年2期)2018-11-13
当代陕西(2018年12期)2018-08-04
扬子江(2018年2期)2018-03-24
读写算·教研版(2017年2期)2017-07-10
艺海(剧本创作)(2015年1期)2015-12-19
知识力量·教育理论与教学研究(2013年11期)2013-11-11