煤矿探巷机器人感测与控制系统研发与应用
2022-05-13 11:42赵春雷田中华舒爱国朱红金李慧彤
煤炭工程 2022年5期
赵春雷,田中华,李 航,舒爱国,朱红金,李 明,李慧彤
(1.北京天地华泰矿业管理股份有限公司,北京 100013;2.中国矿业大学(北京) 能源与矿业学院,北京 100083)
20世纪90年代以前,我国部分地区小煤窑泛滥,无计划开采、越界偷采严重,导致生产布局混乱、资源浪费。自2009年始,我国陆续对各中、小型煤矿进行兼并重组,实现总体规划、计划开采。但是,整合后的矿井,地质资料不详,采区受到老巷及房采区等破坏区的威胁,尤其是掘进过程中揭露老巷及房采区时,容易造成大量有毒、有害气体及老空水涌出,给安全生产带来极大隐患。
长期以来,我国大部分矿井对老巷及房采区的探查与监控都采取人工结合物探的方式进行人为探巷,这样不仅安全系数小,而且不能对老巷的实际情况进行全面、正确的了解[1-3]。尤其遇到低矮、有害气体聚集、顶板未支护的巷道,人员难以进入,无法掌握现场情况,给下一步制定具体生产措施及安全生产带来了困难和障碍,并且人为探巷时,一旦遇到险情,极有可能造成人员伤亡事故。
我国近年来步入煤矿智能化发展的初级阶段,煤炭行业科技创新与产业变革方兴未艾,智能化、无人化、安全化开采也是行业未来的发展方向[4-8]。而矿用智能装备尤其是机器人的研制与运用是改善井下安全生产的根本手段之一。国内外对煤矿用机器人已进行了大量的研究[9-12],美澳研制多种煤矿救援机器人用于救援工作,但在井下实际应用过程中面临诸多难题,在恶劣的环境中多发生故障。国内研制煤矿机器人起步较晚,目前对于不同用途的机器人检测与应用停留在实验室阶段,在实际工况中应用尚处于起步阶段,并且机器人研发过程并未建立统一规范标准。由于井下环境特殊,存在瓦斯等易燃易爆气体,机器人兼顾防爆性能、探测能力以及环境适应能力至关重要。因此,机器人的感知、检测、控制技术亟待创新是主要发展瓶颈之一。
因为井下环境恶劣,人工探巷直接影响煤矿生产和效益。随着机器人技术的不断进步,利用机器人进行辅助生产及救援是保障安全的重要方向[13-17]。在这种情况下,攻关井下老巷探巷机器人研发技术难题,尤其针对机器人的感测与控制技术进行创新,设计出具有人机交互、自主行走、数据处理等功能的机器人,使得机器代替人工、利用机器人探巷代替人为探巷,进而改掉人工方式的弊端,对实现探巷工作安全、高效,证煤矿安全生产发展有重大意义,同时也是对我国煤矿机器人研发工作的探索与补充。
1 煤矿探巷机器人设计方案
煤矿探巷机器人系统主要由机器人本体、无线中继和手持遥控终端三部分组成,如图1所示。机器人本体采用履带式行走方式,使其适应探测老巷的需求,并具有自主避障功能和一定的越障能力;最后的现场应用表明双履带的构造符合设计跟应用,且保持平稳的越障性能[18-20]。防爆云台和多参数气体传感器具有环境探测、图像采集、热眼检测、音频采集等功能;手持遥控终端通过无线中继实现对机器人的无线遥控,并通过互联网实现数据的实时监测与传输。

图1 煤矿探巷机器人组成
煤矿探巷机器人本体采用履带式行走方式,根据巷道地形,可以满足越障、爬坡、越沟等作业,结构简单,控制方便。机器人本体采用远距离无线遥控方式通讯和控制,通过手持终端,经无线网络,向机器人本体发出指令,远程控制机器人行走、信息采集,以及根据现场实际情况调整防爆一体化云台动作,所携带的红外热成像仪可自动捕捉视野区域内的最高温度并显示在手持终端的屏幕上,方便作业人员了解探巷危险区域,同时通过多参数传感器实时观测巷道检测地点,可连续检测甲烷、二氧化碳、一氧化碳等多种气体的浓度及现场环境温度等参数,并可设定特定参数超限报警。
2 探巷机器人主要系统研发
探巷机器人主要适用于煤矿井下老巷的探测任务,其采用全金属骨架的履带式结构,且具备有效减震措施,机动性强,行走平稳。探巷机器人基本参数:行走速度1.5m/s;外壳防护等级是IP65;连续行走时间达到3h;爬坡能力最高78%(38°);红外摄像机图像解析度700TVL;拾音器灵敏度40dB;红外热像仪具备网络+模拟视频接口。

图2 煤矿探巷机器人防爆云台
防爆云台的结构如图2所示。防爆指使用专业方法使机器人本身不发生易燃、易爆物质的意外[21-25]。防爆云台具有红外热成像及可见光摄像机两种图像采集功能,红外热成像仪具有锗玻璃及防护网防护功能,实现对热源的检测。通过可见光摄像机采集老巷现场环境并将图像实时上传,辅助操作人员准确操控机器人。为确保机器人在井下淋水、黑暗及高粉尘等操作环境中正常工作,在摄像机镜头前安装有雨刷器和补光灯,利用手持遥控终端可对其进行控制。
针对煤矿探巷机器人设计了防爆云台动作执行程序。鉴于云台的多样性和云台运转作业的可控性,该程序设计的结果直接作用于闭路监视系统的可操作性及可靠性等关键性指标。程序运用yuntai_cmd函数实现设计,运行使得云台可以稳定固定红外热像仪和可见光摄像机,多角度地调节支撑设备以及进行360°转动调整机器人的视野。
此外,机器人携带GD7型多参数传感器作为环境探测工具,多参数传感器可同时连续监测甲烷、二氧化碳、一氧化碳、氧气、温度、湿度和差压等7种参数,并可设定特定参数超限报警。传感器采用RS485通讯模式,与监控系统联网实现数据传输。
GD7型多参数传感器工作原理如图3所示。氧气、一氧化碳、二氧化碳和甲烷探头以及温度、湿度和差压传感器将外界输入信号分别送入A/D转换器,进行模拟量到数字量的转换,然后经CPU处理后得到与实际输入对应的数值,通过485通讯模块传送到显示屏上显示。同时,采集的二氧化碳、一氧化碳等多种气体参数经无线中继,传送到手持终端进行显示。另外,机器人本体上还装有后置摄像机、照明灯、红外测温传感器、避障传感器和拾音器。后置摄像机用来采集设备后方的视频信息,左右两侧的照明灯可使机器人在光线弱的环境中扩大摄像机的可视范围,机器人前端右中部设有拾音器,用以检测机器人周围的音频信号。
探巷机器人在探巷过程中出现损坏、打滑现象均会造成摩擦力显著增大,如果工作中温度超过机器工作温度将会导致机器本体零部件发热严重,当其超过温度阈值将会停止工作,造成一定的工作问题,探巷机器人储存、使用环境温度为-20~+70℃。因此需要灵敏度较高的传感器进行工作。

图3 多参数气体传感器原理图
无线中继是手持遥控终端和机器人本体无线通讯的中间枢纽,操控人员通过矿用本安手持遥控终端经无线中继之间架设的无线网络,向机器人发出指令,远程控制机器人的行走、现场环境信息采集以及防爆云台的控制等。
手持遥控终端可以实现对机器人的视频显示、数据监视和行走控制,手持遥控终端顶端设有音频输出接口,可外接耳机或其他音频设备。手持遥控终端通过屏幕界面上的模拟按钮,实现对机器人及云台的操控。设计了煤矿探巷机器人遥控终端开关量程序。
3 软件系统流程设计
3.1 主控程序流程设计
主控程序设计流程如图4所示,手持遥控终端为所有控制命令的下发起始端,操作人员通过手持遥控终端下发控制命令并通过无线WiFi信号传输到无线中继,无线中继将WiFi控制命令进行网络转换及控制信号功率放大后,实时转发至机器人本体。为了保证控制命令的准确性,机器人本体会对接收到的命令进行CRC校验,控制命令经过校验解析无误后进行相应的控制动作。若CRC校验有错误,机器人本体认为本次接收到控制命令存在错误,且不进行相应设备的动作,等待下一次控制命令的接收。
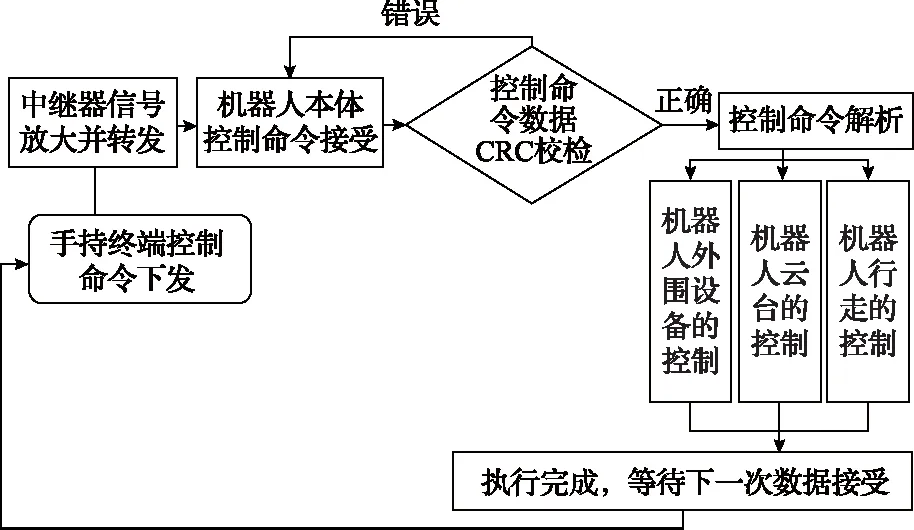
图4 主控程序流程图
3.2 信息采集及显示报警程序流程设计
信息采集及显示报警程序设计流程如图5所示,机器人本体运行状态及其周围环境参数等信息通过各个信息采集模块(包括温度采集模块、视频信息采集模块、气体参数采集模块、电池信息采集模块、避障数据采集模块等)传输至机器人本体主控系统,并通过主控系统对采集到的数据进行解析,得到相应的机器人本体及周边环境参数值并上传至手持遥控终端显示,同时手持遥控终端可对参数报警限值进行配置。机器人本体主控系统实时将采集的参数信息与其报警限值进行比较,若超过限值,本体控制系统将此报警信息上传至手持遥控终端进行报警并将报警信息记录,以便后续对参数报警信息的查阅。

图5 信息采集及显示报警程序流程图
3.3 数据传输及通讯程序流程设计
数据传输及通讯程序设计流程如图6所示,由于视频传输的数据远远大于控制命令数据,为了消除控制命令数据传输被视频信号传输干扰的问题,采用了视频与控制命令数据分开传输的方式。控制命令由手持遥控终端通过WiFi传输至无线中继,并经过无线中继进行网络转换为RS232通讯并进行信号放大处理后,再经过无线数传电台传输至机器人本体通讯主控模块,对机器人本体进行控制。同理,机器人本体的采集数据,通过机器人本体通讯主控模块经过无线数传电台传输至无线中继后,通过无线中继进行网络转换为RS232及信号放大后,通过WIFI模式传输至手持遥控终端显示。
如图6所示,机器人本体视频信号通过无线图传电台传输至无线中继,无线中继接收到视频信号后,经过视频服务器将模拟视频信号转换成网络视频信号,并经过网络转换将以太网信号转换为WiFi模式,经过WiFi传输至手持遥控终端,进行视频图像展示。

图6 数据传输及通讯程序流程图
4 探巷机器人应用效果
探巷机器人研制成功后,在山西某矿进行了实际应用。该矿位于朔州市山阴县,探巷机器人工作于15304工作面,倾向长240m,平均采高3m,倾角3°,共配置162台液压支架,支架中心距1.5m,刮板机中部槽137节。该矿井田范围内存在较大范围的房采区以及周边煤矿房采区积水、有毒有害气体等隐患,在矿井正常生产期间经常会揭露老巷和老空区,存在有毒有害气体涌出等风险。根据老巷探查实际现状,为保证探查老巷人员安全及矿井安全生产,用履带式探巷机器人代替人工进行老巷探查。
实际应用效果表明:检测数据为温度16.4℃、氧气19.3%、湿度74.5%RH、二氧化碳0.54%、甲烷和一氧化碳均为零,探巷结果表明该废弃老巷安全。本次现场应用效果表明在该矿用履带式探巷机器人实践性能方面表现良好,负载能力大,越障能力强,适应复杂环境和地形,作业效率高,监控摄像头可实现多方位视频监视。利用探巷机器人可以清楚拍摄老巷形状及其它情况,最大限度的降低了探查老巷的风险,而且探查老巷不需要排放老巷内的气体,所有的参数和图像信息可实时上传,有效地解决了探巷人员在上述场所面临的人身安全和数据信息采集不足等问题,对提高探巷安全性,减少人员伤亡具有重要意义。
为比较机器人探巷相对于人工的优势以及测试该探巷机器人的性能表现。就某老巷的探巷各个环节进行人工探查和该机器人探查的最终结果进行对比分析,见表1。
由表1可以看出,采用机器人探查,工作效率大大提高,同时大量减少用工数量,更重要的是,采用机器人探巷不必承担人工探查所承担的未知风险,大大提高了安全性,对于实现煤矿无人化开采也是很好的探索。
5 结 语
基于对煤矿老巷探查的需求,将矿用防爆技术与机器人技术相结合,研发设计了适合煤矿井下的履带式探巷机器人,具体对探巷机器人的感测和控制系统研发与设计流程进行介绍。该机器人具有较好的运动性能和适应能力,具有体积小、质量轻、方便运输等特点,通过在煤矿的实际应用表明:设计的探巷机器人可以替代探巷人员在老巷及房采区探查,适应性强、使用效率高,研发的感测和控制系统准确可靠,能够为井下老巷探测、服务生产提供可靠、详实的资料。另一方面,用机器人代替人工探巷体现了“以人为本,生命至上”的理念,在安全方面大幅度的降低了面临的重大风险,确保了作业人员的安全。在经济方面为回采工作面复采提供了技术依据,减少了煤炭资源的浪费,提高了煤矿的经济效益。
猜你喜欢
初中生学习指导·作文评改版(2020年11期)2020-09-10
作文大王·中高年级(2019年3期)2019-04-23
学苑创造·C版(2018年7期)2018-08-08
科学与技术(2018年23期)2018-06-17
上海师范大学学报·自然科学版(2018年2期)2018-05-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
特别健康·下半月(2017年7期)2017-08-09
作文周刊(中考版)(2015年20期)2015-06-10