
车辆主动悬架系统控制方案设计
2022-05-11 06:04左瑞
科技与创新 2022年9期
左瑞
(宿豫中等专业学校,江苏 宿迁 223800)
车辆悬架作为连接车体与车轴的重要部分,用来减轻来源于外界的冲击。悬架系统分被动悬架、半主动悬架、主动悬架。被动悬架主要的缺陷在于刚度与阻尼是固定的,难以适应多变的路面。半主动悬架通过计算机来改变自身弹簧与阻尼参数,使性能达到最优化。主动悬架能根据外界信号自行调节至最优状态,目前由于价格较贵而主要应用在高级轿车上。车辆悬架综合性能的指标可以从侧倾加速度、悬架的动行程、车身垂直加速度、轮胎的动载荷等方面进行综合评价。本文主要针对车辆主动悬架系统的控制方案展开研究。
1 1/4车辆悬架系统数学模型建立
为了便于分析,本文建立1/4车辆模型。主动悬架系统1/4结构如图1所示,图1中,Zb为车身位移,Zt为车轮位移,Zg为路面对车辆的激励位移,mb为1/4车身质量,mt为1/4车轮质量,Ks为弹簧刚度,Kt为轮胎等效刚度,F为主动控制力。

图1 主动悬架系统1/4结构简图
在将车辆除刚度、阻尼元件以及主动力作动器之外的部分看作质点的条件下,对1/4车辆模型进行受力分析,建立主动悬架系统的动力学方程:

选取车身速度、车轮速度、车身位移Zb、车轮位移Zt、路面对车辆激励位移Zg为状态变量。
结合评价指标:驾乘的舒适性、行驶的平顺性、操纵的稳定性等方面,选取车身垂直加速度、悬架动行程(Zb-Zt)和轮胎动位移(Zt-Zg)作为系统输出向量。求得系统的状态空间表达式为:

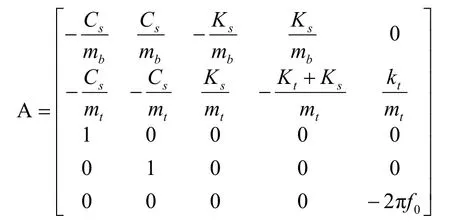
式(2)中:A、B1、B2、C、D1、D2为已知常数的适维矩阵。
系统矩阵:
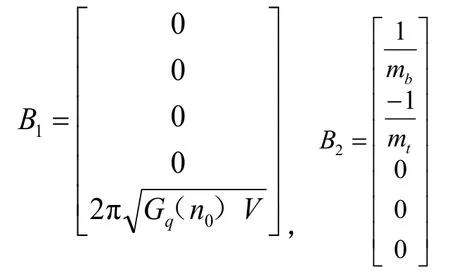
输入矩阵:
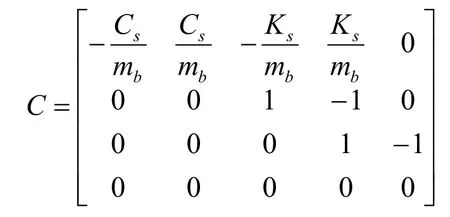
输出矩阵:
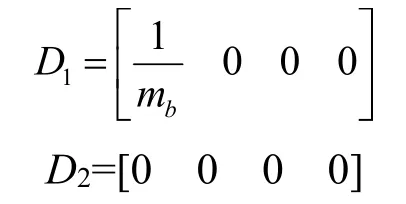
直接传递矩阵:
2 耗散状态反馈控制器的设计
设计控制器的目的是提高系统的性能。耗散系统是一个热力学上的开放系统,它与保守系统形成对比。
2.1 耗散理论
耗散系统的理论:定义供给率s(w,y)是一个实数值函数,对于任何时间T≥0满足,其中w(t)作为外部干扰输入量,y(t)作为输出量。
对系统:

如果系统中存在储能函数V(x(t))≥0并且满足下列不等式:

那么这个系统在供给率下是严格耗散的。在这里,x(t)是t时刻的系统状态,x(0)是系统的初始状态。供给率:

式(4)中:Q、S、R为已知常数的实维实数矩阵,且Q、R互为对称关系。
2.2 耗散状态反馈控制器的设计
在设计中,当Q≤0,公式(3)所描述的系统对供给率是严格耗散的时候,称该系统为严格(Q,S,R)耗散的系统。根据文献[1],使得公式(1)所描述的系统能够实现严格(Q,S,R)耗散状态反馈控制的充分条件是:

则状态反馈增益矩阵K=WX-1。
本文中:

R=r(非负待定系数)。矩阵中,q1与s1是与车身加速度相关的量,q2与s2是与悬架动行程相关的量,q3与s3、q4与s4分别是与轮胎动位移和轮胎动载荷相关的量。如当减小q1与s1而增大其他系数的时候,车身加速度会提升,但是悬架动行程与车轮位移会减小。选取相关系数时要注意使车身加速度要尽量小。设定好各个值之后,可以运用Matlab中LMI工具箱求出解X和W。
3 悬架系统的虚拟建模与仿真分析
3.1 路面模型的虚拟建模与仿真
车辆振动来自于多方因素的影响,如汽车的制动系统、发动机和传动系统、转向系统以及路况等。不同的路况对车辆的干扰激励也不同。在大多数情况下对于车辆平顺性能的探究,都以路面的不规则度作为车辆悬架系统的路面输入信号。
本文选用滤波白噪声来建立路面仿真模型,滤波白噪声模拟路面输入的公式:

式(5)中:f0为下截止频率;zr为路面激励速度;G0为路面不平度系数;v0为车速;w(t)为数学期望值为零的高斯白噪声。
建立如图2所示的仿真模型。图2中路面不平度系数G0取5×10-6m/cycle,下截止频率f0取0.01 Hz,车速v0取20 m/s,仿真时间为5 s。运行仿真,得到路面输入信号如图3所示。

图2 路面输入模型

图3 路面输入信号
3.2 控制系统的虚拟建模与仿真
为搭建系统的虚拟模型,本文的悬架参数选自某轿车。
为便于对比,参考文献[2],搭建了1/4主动悬架和被动悬架控制系统虚拟模型,如图4所示。图4中主动悬架仿真模型如图5所示。图4中被动悬架仿真模型如图6所示。

图4 1/4悬架控制系统仿真模型
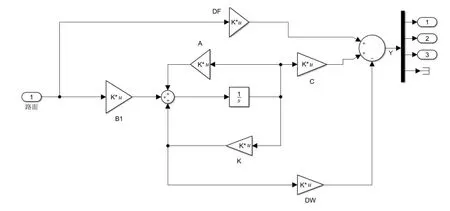
图5 主动悬架控制系统模型
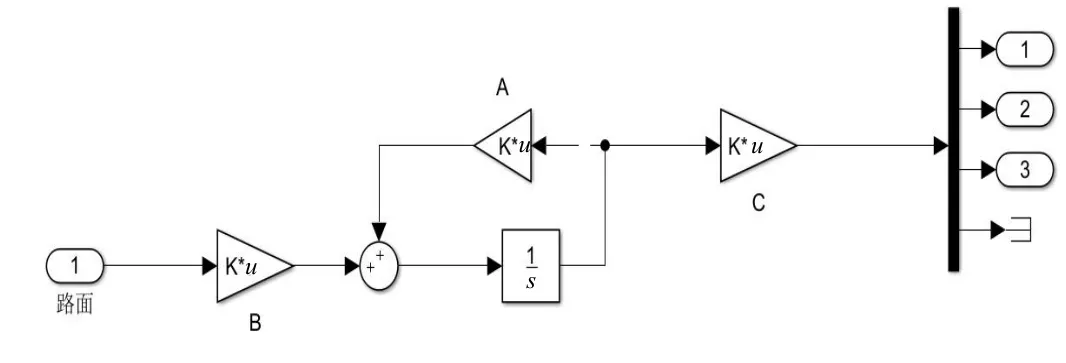
图6 被动悬架控制系统模型
3.3 对比分析
运行仿真,将两个系统进行对比分析。为使主动悬架系统的各项指标最优,确定Q、S、R中各变量值为q1=0.2,q2=620,q3=2 500,q4=10-8,r=5 500,s1=10,s2=0.5,s3=0.1,s4=10-4,最终求得状态反馈矩阵:K=[-1 021 4 -20 814 61 423 82 174]运行仿真,得仿真结果如图7~图9所示。
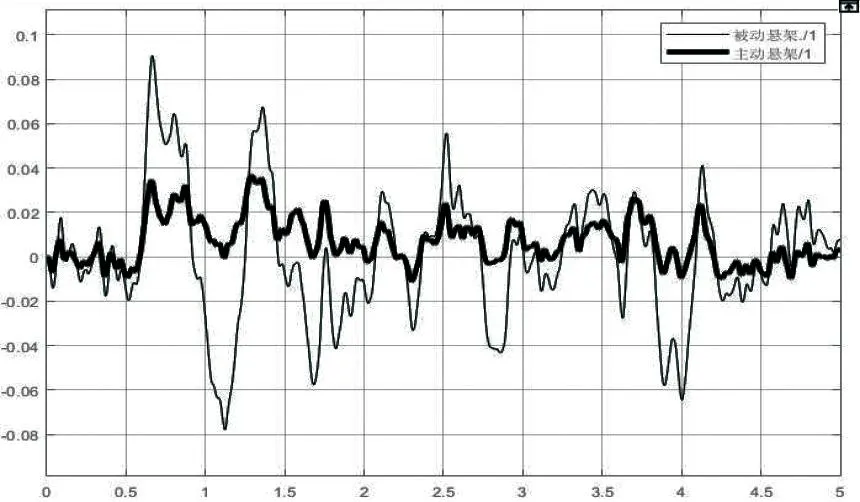
图7 主动悬架与被动悬架车身垂直加速度对比

图8 主动悬架与被动悬架动行程对比图
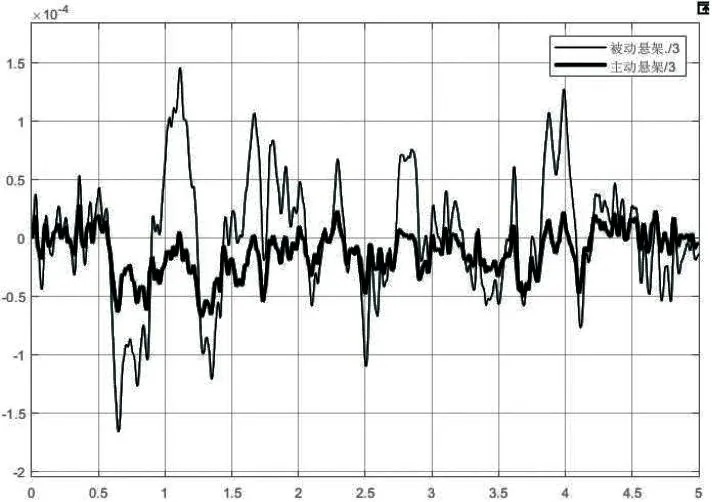
图9 主动悬架与被动悬架轮胎动位移对比
对比曲线可得,基于耗散控制器的主动悬架系统在3个指标上具有明显的优势。被动悬架振动明显,而主动悬架在近乎所有时间点,曲线的变化更加平顺,即车身所受振动更小,车身加速度与悬架动行程振动更轻。
4 结论
本文建立了车辆悬架系统数学建模,并完成了控制方案设计。通过理论分析和仿真实验,验证了采用耗散控制器的主动悬架相对于被动悬架具有更优秀的平顺性和乘坐舒适性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
时代汽车(2021年1期)2021-03-03
VOGUE服饰与美容(2020年5期)2020-09-03
新高考·教师版(2016年2期)2017-07-05
中学生数理化·高一版(2016年8期)2016-12-07
大众科学(2015年1期)2015-09-10
新高考·高一物理(2015年5期)2015-08-18
新高考·高一物理(2015年5期)2015-08-18
