工业机器人工具坐标及方向的标定方法
2022-05-09 13:20:16吴云飞王仁胜
海南热带海洋学院学报 2022年2期
吴云飞,柳 贺,李 阳,王仁胜
(1.安徽工程大学 电气工程学院,安徽 芜湖241009;2.安徽埃夫特智能装备股份有限公司,安徽 芜湖241009)
0 引言
如今,在工业进程不断发展的前提下,工业机器人的发展也越来越快,在各行各业都能见到工业机器人的身影,如光伏、锂电、码垛、焊接、打磨行业,等等。但是不同行业不同工艺的机器人的任务和需求都不尽相同,这就意味着机器人末端夹具也会各不相同。面对机器人不同的末端夹具,需要根据实际需求以及情况来建立工具坐标系以及标定工具方向。工具坐标系标定决定了轨迹规划的准确性,工具坐标系标定对机器人离线编程意义重大,因此工具及工件标定具有重要的研究意义。
李广云等[1]提出一种快速确定坐标系的方法,利用激光跟踪仪及几何法原理进行工具坐标系的位置标定,该方法快速有效;何淼[2]以FANUC工业机器人为例,分析了直接输入法、三点法、六点法的工具坐标系的设置方法;罗豪龙等[3]将最小二乘法与工具坐标系相结合,提出一种新的工具坐标系的标定方法,该方法提高了标定的精度;周星等[4]和吴乐平等[5]提出一种改进的五点选优TCP(Tool Center Point)标定算法,在传统的四点法的基础上增加了误差阈值,使标定精度进一步提高;王永强等[6]根据打磨工件标定算法及工件的特点,设计标定块,利用辅助特征点三点标定方法及合理的测量方法,完成了工件的高精度匹配;李培东等[7-11]针对不同行业及型号的机器人进行了关于工具坐标系标定方法的说明以及改进。但以上方法均不适用于本研究的应用场景,所以,根据市场需求及应用场景,本文提出了一种新的方法。
为解决客户现场具体需求问题,本文设计如下方法。机器人抓取一根直杆,放置到固定位置的卡槽中,接着绕抓取的直杆旋转90°。完成后,放置直杆离开。机器人在绕杆的过程不能产生较大的偏差,目前评估约在1~2 mm以内。
在机器人投用于正常的工艺现场之前,通常会通过仿真软件来模拟评估机器人是否可实现动作,以及实现动作后从仿真软件中输出点位信息来帮助调试。但是在应用于实际工艺之前的仿真中,模型与实际夹具还是存在着较大偏差,所以在仿真中得到的工具值不可以直接输入,而需要根据具体的夹具和新方法通过标定来准确地计算出直杆的工具坐标,以解决工艺中的精度问题。由于传统的基于C10系统的埃夫特工业机器人的实现方法是靠传统的TCP与坐标轴的方向来标定工具坐标方向,这种方法精度远远不够。基于此种情况,设计一种算法以让示教器实现需求非常必要。
1 工具方向标定方法
在如今的工业生产线上,通常存在着多种工艺,这就使得工业机器人需要在末端执行器上安装特定的工具,并且需要在这些工具的规定位置上建立一个坐标系,以便坐标的获取与转换,这就是所谓的工具坐标系,而机器人某些特定的轨迹常常基于工具上的某一点来进行规划,这个点被称为工具中心点(TCP),简称CT点。
本实验所选用机器人基于C10系统的埃夫特工业机器人,在实现绕杆90°旋转的工艺时,传统的方法是至少先标定出直杆的一个TCP,标定方法是C10系统的三点标定法,然后再进行工具方向的标定,方法是通过工程师的经验用肉眼或者吊铅垂线将直杆尽可能调整至与选择的基础坐标系中的XYZ轴的任一方向重合,从而实现直杆夹具的工具方向的标定。
2 改进的工具方向标定方法
针对传统工具方向标定方法的缺陷与不足,本文提出用算法来解决工具方向标定问题。首先标定出直杆两端面正中心的TCP位置,分别设为T0和T1。然后取其中间值,计算出直杆正中心的T2的偏置数值。再通过算法确定基于C10系统的欧拉角变换,从而计算出直杆的工具方向。
2.1 工具坐标
一般情况下,工具坐标系的原点就是PC,工具在被安装在机器人末端执行器上之后,除非人为改变其安装位置,否则工具坐标系相对于机器人末端坐标系的关系是固定不变的。
而在实际工作中,原始默认的工具坐标系有时不能满足工作需求,这时候就需要工程师根据末端执行器上的特定工具装置来重新构建一个工具坐标系。这个新建立的工具坐标系会在实际工作需求中让操作者灵活方便地调整机器人姿态,从而精确地控制机器人的运动轨迹来实现工艺需求。
2.2 工具坐标的标定
首先通过标定来准确地计算出直杆的工具坐标。当工具的TCP点标定完成后(设定为直杆的正中心),再标定工具方向(设定直杆的方向为工具的z轴方向)。最后完成整个工具标定后,对机器人进行手动示教,将直杆放置到卡槽中间,接着在工具坐标系下,点击TZ绕工具z方向旋转90°。完成整个动作的示教。
首先标定出直杆两端正中心的TCP位置,分别为T0和T1。然后取其中间值,计算出直杆正中心的T2的偏置数值。接着标定直杆的方向为工具z方向。并通过上面T0和T1的偏置数值,可以计算出直杆的z方向,再进行工具方向的标定。计算公式为
(1)
(2)
(3)
其中:T0(x)、T0(y)、T0(z)是T0点的坐标值;T1(x)、T1(y)、T1(z)是T1点的坐标值;T2(x)、T2(y)、T2(z)是基于T0、T1得到的偏置中心点T2的坐标值。如图1所示,根据T0、T1的坐标值计算出T2的坐标值。
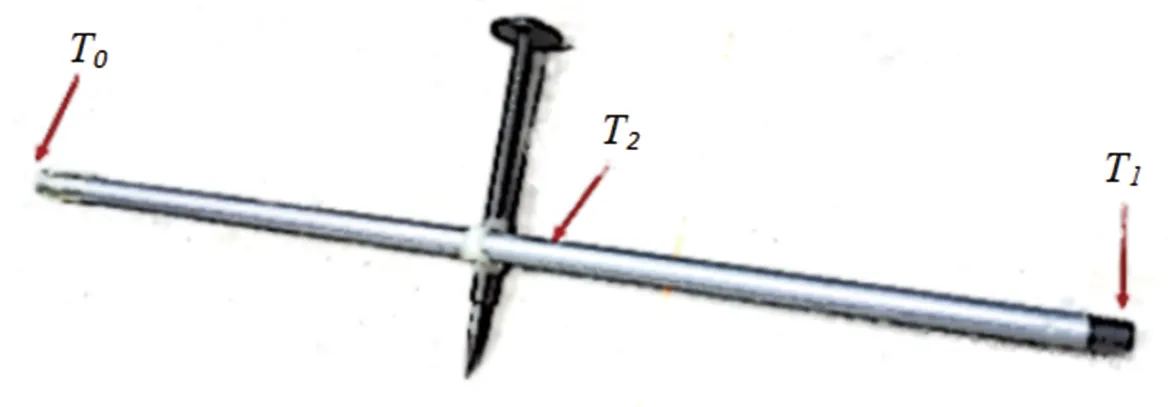
图1 直杆模型TCP点位置
完成程序示教调用工具坐标系,完成点位示教。程序中相关点位调用T2工具号。直杆中间点TCP偏移的计算式为
T0=(x1,y1,z1,0,0,0),
(4)
T1=(x2,y2,z2,0,0,0),
(5)
T2=(x3,y3,z3,a3,b3,c3),
(6)

2.3 工具方向标定
在完成夹具的工具坐标标定后,接下来就需要完成工具方向的标定工作。直杆工具方向的计算如图2所示,图2(a)为法兰盘默认的工具方向,图2(b)为根据用户需求自定义标定后的工具方向。
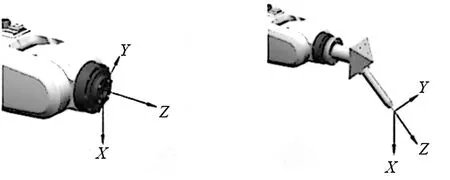
(a)默认工具坐标系 (b)自定义工具坐标系图2 工具坐标系转换对比示意图
显然,默认的工具坐标系与工艺中所需要的坐标系大相径庭,所以工程师需要自己标定自定义的工具坐标系以及工具坐标方向才能完成类似于本文所解决的工艺需求。
根据本次工艺的现场需求,需要注意的是,由于现场为使用机器人绕杆进行旋转,所以本文根据现场需求将直杆所指的方向标定为工具的Z方向,而对于本研究中属于无关变量的直杆的X和Y方向,不作为本研究实验中所考虑的因素。下面主要考虑如何将默认工具坐标系中的工具方向转变为自定义工具坐标系所示的方向。
2.3.1 欧拉角静态定义
在机器人的坐标以及工具值中,abc标识的是机器人姿态变换的欧拉角。在不同的机器人系统中,欧拉角的表示方法各有不同。
为了区别坐标轴,分别设xyz轴为惯性系的参考轴,即大地坐标系的3个轴;设XYZ轴为载体系的参考轴,即载体坐标系的3个轴。
正确的欧拉角组中,任何两个连续的旋转,必须绕着不同的转动轴旋转。因此,欧拉角的表示共有12种方式。其中有6种绕3条轴的旋转(Tait-Bryan Angle):XYZ,XZY,YXZ,YZX,ZXY,ZYX;有6种只绕两条轴的旋转(Proper Euler Angle):XYX,YXY,XZX,ZXZ,YZY,ZYZ。同时,欧拉角组中旋转变换的类型根据参考的旋转坐标的不同又分为2种:一种是绕固定于载体的坐标轴的3个旋转的复合;另外一种是绕大地坐标系参考轴的3个旋转的复合。C10系统使用的是绕固定于载体的坐标轴ZYZ的欧拉角的表示方式。
2.3.2 欧拉角动态定义
①绕固定载体坐标系旋转
设任何一点P1在xyz与XYZ坐标系统的坐标分别为r1与R1。定义Z(α)为绕着Z轴旋转α角度的结果,Y(β)为绕着Y轴旋转β角度的结果,X(γ)为绕着X轴旋转γ角度的结果。
(7)
在本文算法中C10系统为ZYZ的欧拉角,所以本文表示它的姿态角为(α,β,γ),首先,坐标系X1,Y1,Z1为默认的工具方向。
第一步:坐标系X1,Y1,Z1绕Z1轴旋转角度α,旋转方向符合右手坐标系。旋转后的坐标为X2,Y2,Z2。
第二步:坐标系X2,Y2,Z2绕Y2旋转角度β,旋转方向符合右手坐标系。旋转后的坐标为X3,Y3,Z3。
第三步:坐标系X3,Y3,Z3绕Z3进行旋转,对于现场的使用不影响,所以此步骤可以取消,因此可取γ=0,如图3所示。
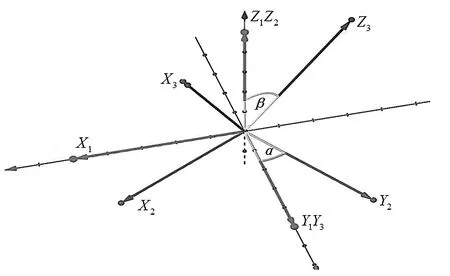
图3 绕固定载体坐标系旋转情形
②绕大地坐标系旋转
设任何一点P2在xyz与XYZ坐标系统的坐标分别为r2与R2。定义z(α1)为绕着z轴旋转α1角度的变换,y(β1)为绕着y轴旋转β1角度的变换,x(γ1)为绕着x轴旋转γ1角度的变换。
(8)
在本文算法中绕大地坐标旋转,同样按照ZYZ的欧拉角进行旋转,姿态角为(α1,β1,γ1) 。
第一步:坐标系X1,Y1,Z1绕Z轴旋转角度α1,此步骤对于Z2方向无变化,可取消α1=0。

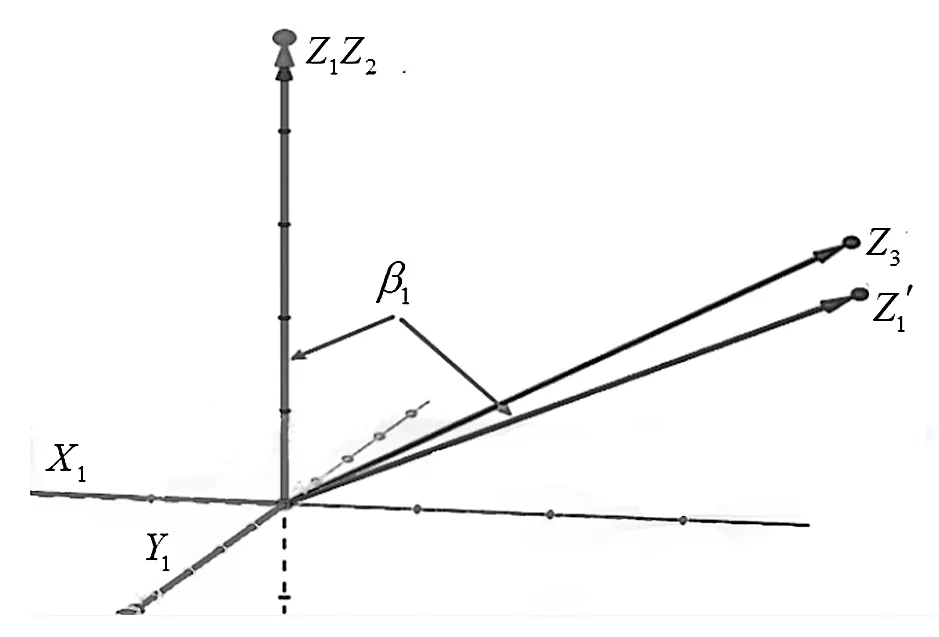
图4 绕大地坐标系旋转β1角
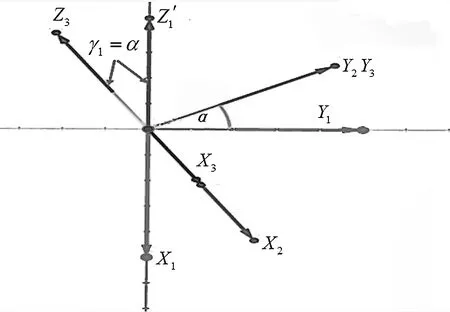
图5 绕大地坐标系旋转γ1角
2.3.3ZYZ欧拉角的计算
从绕固定载体坐标系旋转与绕大地坐标系旋转两种方式比较来看,绕大地坐标系旋转更便于工业中的计算和运用。所以本文使用绕大地坐标的方式计算欧拉角,再推算出绕固定载体坐标系旋转的值,这样就能得出自定义的工具坐标系以及工具方向。目前已知条件为已知T2的方向向量(X3,Y3,Z3),对应图上向量Z3,也就是Z3的坐标。

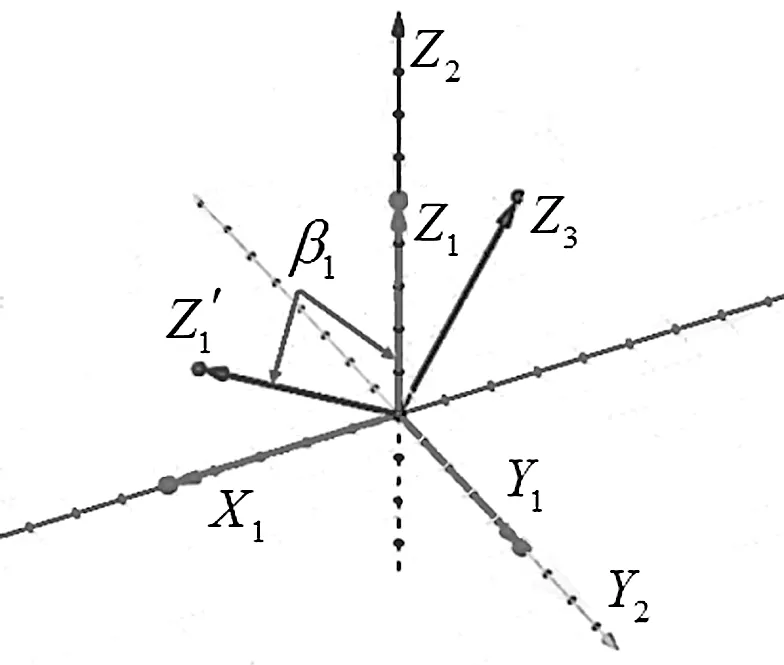
图6 Z1绕Y轴旋转β1角
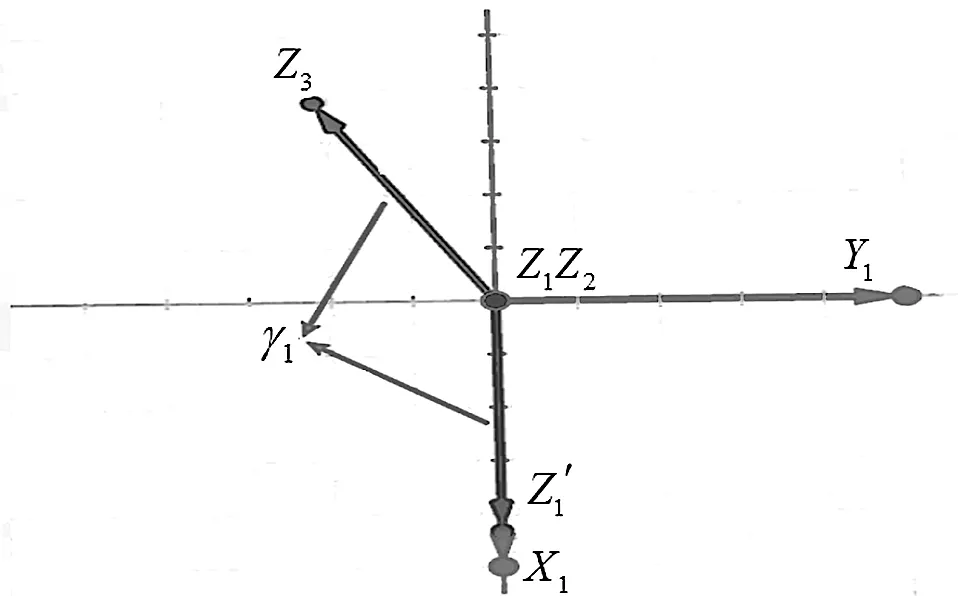
图7 计算γ1角度
由计算得到的β1、γ1的值,可将默认工具坐标系中的工具z方向转变为自定义工具坐标系的工具z方向。完成整个工具标定后,机器人就可以手动示教,将直杆放置到卡槽中间,接着在工具坐标系下,点击TZ绕工具z方向旋转90°。完成整个动作的示教。
3 实验结果
本文通过理论模型与实物实验相比较来得出实验结果及结论。由本文提出的方法来编写的改进的部分标定程序如图8所示,通过仿真软件来模拟机器人工具方向标定如图9所示。
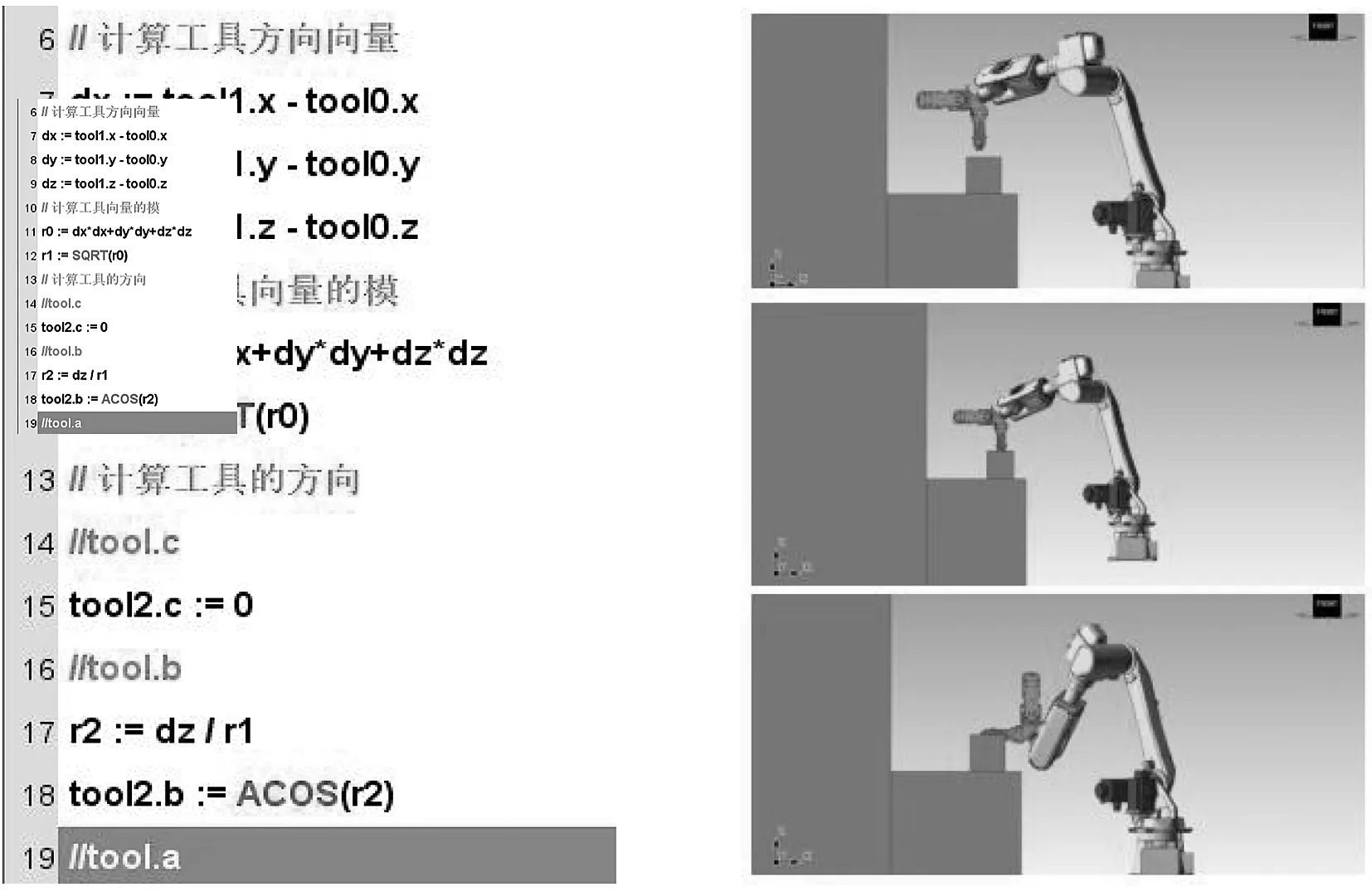
图8 部分示教程序 图9 仿真软件仿真姿态
将传统方法得到的工具方向、本文方法得到的工具方向以及仿真软件模拟仿真得到的机器人工具方向进行对比实验,通过实验效果发现,本文方法与仿真软件得出数值结果更加接近,明显要比传统方法更精确、更方便快捷,且受主观外界因素的影响更小,完成效果更好。下面是实验中使用3种方法和两组T0、T1坐标值得到两组T2的实验结果的对比情况(表1~表4)。
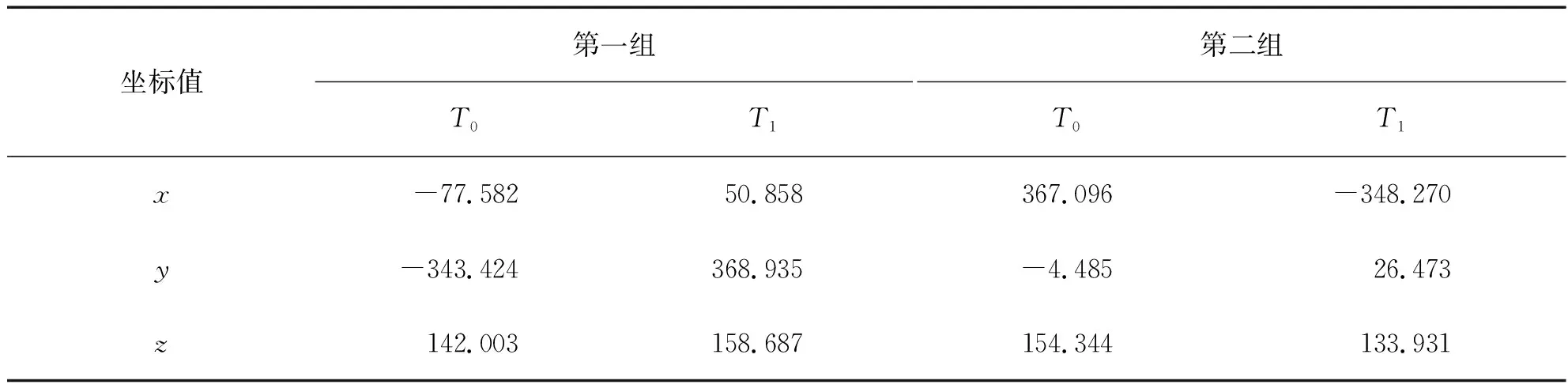
表1 T0、T1坐标
表3和表4中的结果与表2仿真结果相比较得知,与传统的标定工具方向方法相比,本文算法得到的欧拉角度值与模拟仿真得出的理论值误差更小,这说明在精度方面,本文算法明显比传统方法更加准确。并且在实际绕杆旋转工艺的实现过程中,直杆旋转更加稳定,实现过程也更加方便,不需要再通过人为经验去标定方向,算法改进有效且实用性很强。
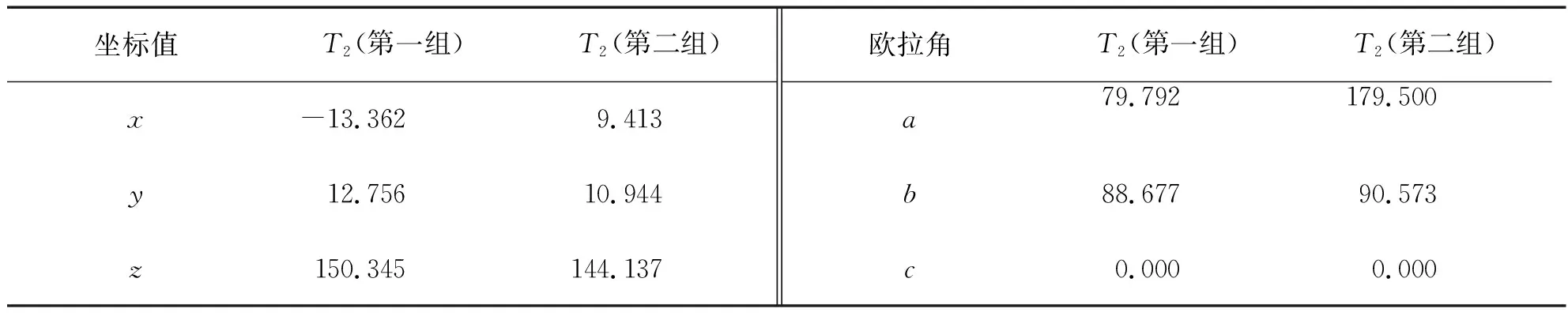
表2 仿真得到T2坐标的结果
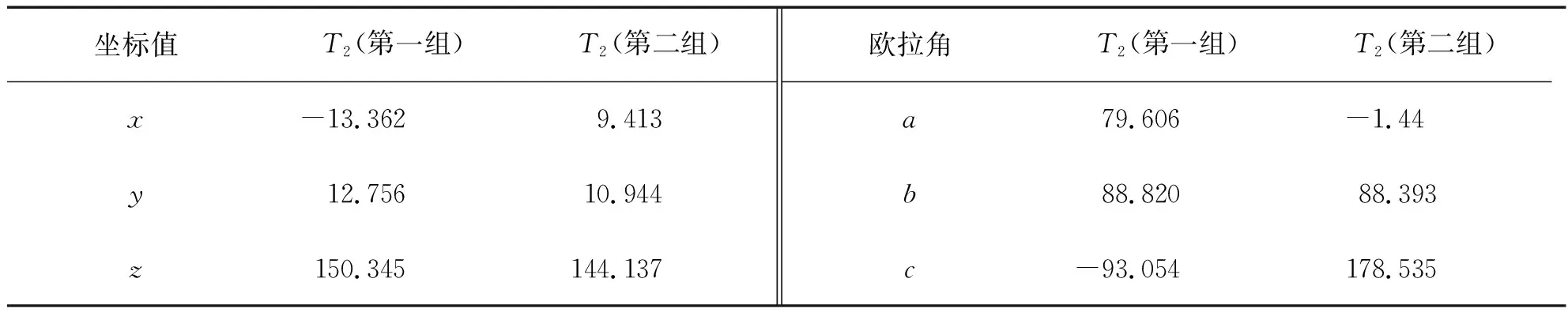
表3 传统方法计算示教得到T2坐标的结果
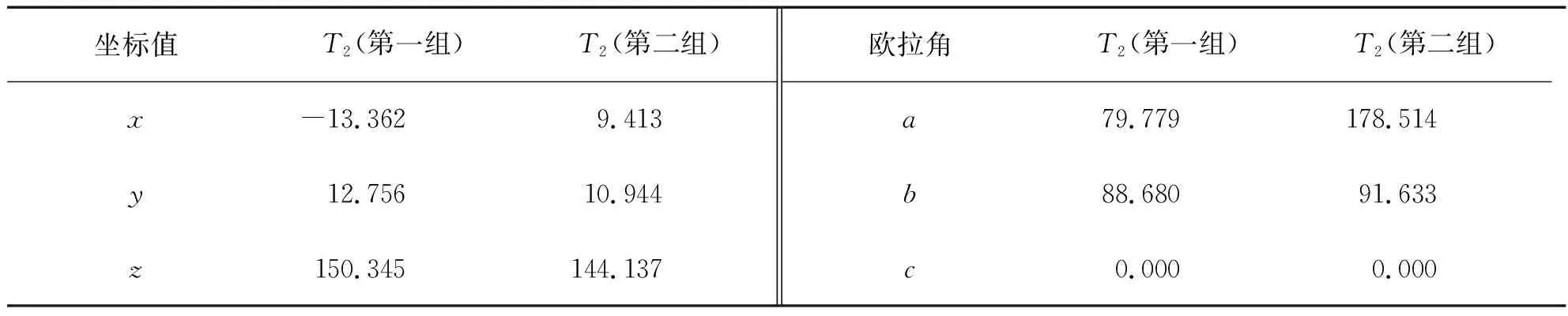
表4 本文方法计算得到T2坐标的结果
4 结论
在如今的工业领域中,工艺精度要求越来越高,本文就针对传统标定工具方向方法中出现的缺陷开展研究。为解决工艺需求,针对传统方法的缺陷,提出了通过算法确定欧拉角变换来实现工具坐标方向的准确标定以及绕杆旋转工艺,从而使得标定机器人工具方向的时候可以通过示教器算法程序来进行工具方向的精确标定,大大地方便了工艺流程。通过实验对比,本文解决了传统方法所存在的精度问题,与传统方法相比较,本文提出的算法在应用中更为准确,误差更小,满足工艺要求。
猜你喜欢
军事文摘·科学少年(2021年11期)2021-12-04 22:42:25
消费电子(2021年5期)2021-07-17 23:13:31
动漫星空(兴趣百科)(2020年5期)2020-06-10 03:12:12
汽车维修与保养(2020年11期)2020-06-09 05:42:16
物理之友(2018年7期)2018-08-06 00:51:46
科技视界(2017年6期)2017-07-01 08:33:34
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
软件导刊(2016年11期)2016-12-22 21:37:36
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38