LCC/VSC混联系统多区域间惯性支撑协调控制策略与仿真
2022-05-09 03:01:46雷霄夏勇军杨尚瑾王薇薇陈堃李新年
电力建设 2022年5期
雷霄,夏勇军,杨尚瑾,王薇薇,陈堃,李新年
(1.中国电力科学研究院有限公司,北京市100192;2.国网湖北省电力有限公司电力科学研究院,武汉市 430077)
0 引 言
近年来,高压直流输电(high voltage direct current,HVDC)技术在我国得到了大规模推广,其两大技术路线——基于电流源换流器的高压直流(line commutation converter - HVDC,LCC-HVDC)[1]和基于电压源换流器的柔性直流(voltage source converter- HVDC,VSC-HVDC)均获得了广泛的工程应用[2-3]。LCC/VSC直流混联(不同类型直流共享公共交流母线或电气距离较近的交流母线)这一系统结构在国网范围内首次出现在落地于湖北的渝鄂背靠背联网工程中[4-5]。该结构的出现不仅是我国大力发展高压直流输电技术的必然结果,而且在我国能源资源与负荷需求逆向分布的大背景下存在更多发展空间[6]。同时,该结构的出现也使得其近区原有的交直流电网纯LCC直流动态功率协调控制方面[7]出现了新的研究需求:混联系统中VSC、LCC、交流电源之间的相互影响和配合控制仍存在深入研究的空间;VSC和LCC接续式传导的结构中,对于如何利用VSC和LCC的灵活可控性和系统内能量传导特性优化近区交直流电网的暂态稳定性,目前的策略仍局限于只考虑单回VSC、只单独考虑送端或者受端系统[8-9],未进行统筹考虑以发挥混合直流灵活可控特性对维持多区域电网稳定运行的巨大优势。
对于VSC进行附加控制的研究,文献[10]提出采用柔性直流有功无功解耦控制回路附加阻尼控制的方法平抑扰动后机组持续缓慢衰减的功率振荡问题,但没有综合考虑对柔直送端系统的影响以及常规LCC直流可以发挥的作用;文献[11]设计了柔性直流附加控制策略及参数,同样未考虑对柔直送端系统的影响及充分利用常规LCC直流的协调控制;文献[12]提出了柔直受端系统网架补强方案,并未考虑充分利用柔直和常规直流的快速可调节特性来改善系统的动态特性。综上,现有的研究并未能充分考虑并利用VSC和LCC接续式传递的混联电网特有的优势,以改善其连接的多个区域电网的动态特性。
针对LCC/VSC直流混联系统结构,需要统筹考虑柔性直流、近区常规直流及交流电网。本文研究LCC/VSC直流混联系统所连接的3个区域交流电网以及2回不同类型直流之间的能量平衡特性,充分考虑VSC和LCC直流功率快速可调特点,设计涉及交直流混联系统的惯性支撑协调控制整体策略。其核心是LCC/VSC功率/频率协调控制,利用直流系统满足故障后惯性支撑、阻尼振荡、辅助一次调频以及减少切机等控制需求,实现故障后近区交直流电网动态功率协调控制。
1 LCC/VSC混联系统
1.1 系统概况
本文以渝鄂VSC背靠背工程北通道送受端近区电网为研究目标,建立了包含背靠背VSC直流输电系统、LCC超高压直流输电系统、VSC送端电网、VSC受端电网(即LCC送端电网)的直流混联系统,该系统主要用于研究VSC、LCC以及近区交流系统之间的相互影响,电网结构如图1所示。
图1中,VSC受端换流变压器与LCC送端换流变压器接入LQ站同一个500 kV交流母线;VSC换流站包含2个单元,额定输送功率2×1 250 MW,VSC送端电网等值到四级断面;VSC送端通过2回交流线路接入系统1的500 kV JP站;电厂4的机组(总功率5 600 MW)通过3回500 kV线路接入LQ站;LQ站通过3回交流线路连接到DL站,VSC受端电网同样等值到四级断面。该系统方式下LQ站总计功率馈入8 100 MW,通过LCC直流外送3 000 MW至交流系统3,其余经LQ-DL三回500 kV交流线路送出至交流电网2。VSC接入其交流系统1位置的短路电流为8 kA,LCC接入其交流系统2位置的短路电流为12.4 kA,LCC接入其交流系统3位置的短路电流为51 kA。
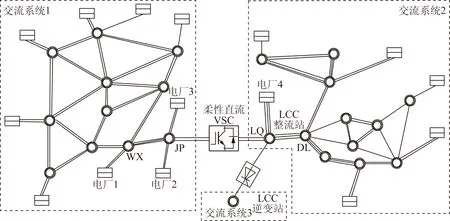
图1 LCC/VSC混联系统电网结构Fig.1 Network structure of LCC/VSC hybrid infeed power system
三区域交直流混联系统等值模型如图2所示[13]。

图2 混联系统等值模型Fig.2 Equivalent model of hybrid infeed power system
图2中:E1∠δ1、E2∠δ2、E3∠δ3为等值机内电势和转子角,U1∠δ1、U2∠δ2、U3∠δ3为母线电压幅值及相角,x1、x2、x3为等值线路电抗,PS1、PS2、PS3为等值机机械功率,PL1、PL2、PL3为负荷功率,PVSC、PLCC为区域1、2之间VSC输送功率和区域2、3之间LCC输送功率。混联系统的能量平衡如式(1)所示。
(1)
根据图2和式(1)分析LCC/VSC混联系统的能量传导特性。当系统内由于故障引起频率振荡/波动或者有功不平衡时,利用VSC和LCC进行功率/频率调制或者功率紧急提升/回降,调整整个系统内的故障后惯性过程、优化能量平衡关系以及提供阻尼作用,使系统更快恢复至稳定运行状态[14-15];根据直流连接的3个交流系统短路容量对比,交流系统3相对最强,因此在故障控制过程中LCC直流可以考虑承担更多的功率平衡任务;功率平衡策略中对交流电网1和交流电网2馈入直流功率变化量的分配按照接入点短路容量的比例进行在线计算;VSC和LCC由于其特殊的联接方式,可以形成接续式传递,将交流系统1的能量平衡问题转移至系统更强的交流系统3进行缓解。
1.2 系统故障类型与风险
本文针对混联系统,考虑以下几种典型故障类型:
1)交流系统1发生N-1/N-2故障:薄弱断面N-1或者N-2故障,引起系统1功角/频率失稳。
2)交流系统2发生N-1/N-2故障:薄弱断面N-1或者N-2故障,引起系统2功角/频率失稳。
3)送端/受端系统跳机故障:跳机故障后网内出现有功功率不平衡、电压支撑能力下降,严重时导致功角/频率失稳。
4)LCC直流换相失败:换相失败期间LCC直流有功缺失,对交流系统2造成冲击引起系统短时振荡。
5)LCC直流闭锁:单极或双极闭锁后系统2有功功率大幅不平衡,需切机或VSC进行紧急功率支援。
2 惯性支撑协调控制系统功能
2.1 协调控制系统设计
针对LCC/VSC混联系统可能存在的故障后失稳问题,本文设计了涉及交流系统1、交流系统2、VSC以及LCC系统的惯性支撑协调控制系统(以下简称协控系统),整体框架如图3所示。
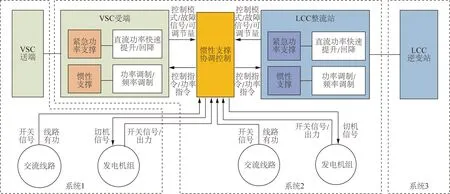
图3 惯性支撑协调控制系统整体框架Fig.3 Overall framework of coordinated control system for inertial support
协控系统接收交流系统1薄弱断面CS-WX双回线路开关信号和有功功率模拟量信号,判断交流线路发生N-1或者N-2故障,并计算潮流变化量;接收交流系统1 VSC近区电厂1、2、3的发电机组故障跳机信号以及机组出力模拟量信号;送出切机信号给系统1发电机组。
协控系统接收交流系统2薄弱断面LQ-DL的3回线路开关信号和有功功率模拟量信号,判断交流线路发生N-1或者N-2故障,并计算潮流变化量;接收交流系统2 VSC近区电厂4发电机组故障跳机信号以及机组出力模拟量信号;送出切机信号给系统2电厂4。
协控系统接收VSC换流站2个换流单元的控制模式信号(包含频率调制模式投入、功率紧急支援模式投入、单单元/双单元控制)以及有功功率定值、可调节量,送出控制指令信号(频率调制模式指令、功率紧急支援模式指令)以及功率指令。
协控系统接收LCC换流站的控制模式信号(同样包含频率调制模式投入、功率紧急支援模式投入、单极/双极功率控制以及换相失败、极非正常停运等故障信号)以及有功功率定值、可调节量,送出控制指令信号(同样包含频率调制模式指令、功率紧急支援模式)以及功率指令。
其中最为核心的LCC和VSC的惯性支撑协调控制逻辑如图4所示,包括了频率控制器(绿色虚线框)、协同功率调制控制器(橙色虚线框)和紧急功率支撑控制器(功率紧急提升/回降功能,蓝色虚线框)。
目前直流工程中广泛应用的频率控制器为比例式或者比例积分式。本文参考了呼辽直流孤岛状态的频率控制器,并对参数进行了适应性地重新整定。图4中上虚线框为LCC部分的控制器,下虚线框为VSC部分的控制器。
图4中:Fref为频率参考值;FAC为接入系统的频率,根据换流站母线电压计算得出,下标_V和_L分别表示VSC和LCC;T1和T2为惯性常数,按工程惯例取值0.1 s;T3为积分时间常数;K1为比例系数;K2为反馈环节的比例系数;Hd和Ld分别为死区上、下限值,实际系统运行中一般设定为网内主力机组一次调频先动作,直流如果投入频率控制功能也仅作为辅助频率控制,本研究考虑充分利用直流系统快速可调能力进行惯性支撑和阻尼支撑,参考其他在运直流工程整定参数,Hd和Ld分别取为0.05 Hz和-0.05 Hz;取K2≪1,K2=0.000 2,T3=0.001 s,其积分部分是放大倍数较大的惯性环节,构成的闭环系统给定稳态无差较小,近似于无差调节;Pfmod_VSC和Pfmod_LCC分别是VSC和LCC频率控制器输出的频率调制功率量;Pref_VSC和Pref_LCC分别是VSC和LCC的原功率指令值;Pref_LCC_final和Pref_VSC_final分别为LCC和VSC直流最终功率指令值;KLCC和KVSC为协同功率调制的比例系数,本研究中按全部调制考虑取1。频率控制器的比例系数K1与直流接入系统强度、直流额定运行功率等因素相关。K1的物理意义为引起系统频率变化1 Hz的直流输送有功功率变化量,与直流接入点的短路比成正比,短路比越大,说明系统越强,频率变化所需的直流功率变化量越大;对于本文VSC接入系统的仿真计算得出1 Hz频率变化所需直流功率变化量为2 000 MW左右,故取K1=2 000;LCC接入系统的仿真计算得出1 Hz频率变化所需直流功率变化量为3 000 MW左右,故取K1=3 000。
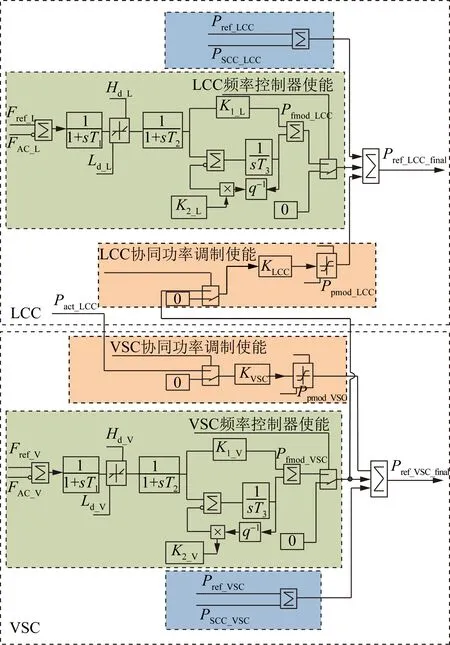
图4 惯性支撑协调控制逻辑Fig.4 Control logic of active power/frequency coordination
计算原理如下:对于VSC部分,频率控制器中,当FAC_V与Fref_V的差值经过一阶惯性环节之后的偏差高于死区上限Hd_V或低于下限Ld_V时,偏差值减去死区限值后再经过一阶惯性环节与带反馈的比例积分环节,得到VSC的频率调制功率量Pfmod_VSC;Pact_LCC为LCC直流的实际运行功率测量值,协同功率使能信号为1时,Pact_LCC经过比例环节KVSC和限幅环节,得到Ppmod_VSC;Pfmod_VSC、Ppmod_VSC、紧急提升/回降量PSCC_VSC与原功率指令Pref_VSC叠加得到最终VSC的功率指令值Pref_VSC_final。
对于LCC部分,同样通过频率控制器计算得到频率调制功率量Pfmod_LCC;VSC的频率调制功率量Pfmod_VSC送入协调控制中LCC的协同功率调制控制器,协同功率调制信号为1时,经过比例环节KLCC以及限幅环节,得到Ppmod_LCC;Pfmod_LCC、Ppmod_LCC、紧急提升/回降量PSCC_LCC叠加至LCC原功率指令Pref_LCC,得到最终LCC的功率指令值Pref_LCC_final。
根据本文交直流混联系统控制需求以及1.2节的故障类型分析,图4中VSC频率控制器使能条件设定为交流系统1发生对应交流线路的N-1/N-2故障,由死区上下限控制其输出值,LCC频率控制器使能条件设定为LCC发生换相失败后延时启动;LCC协同功率调制使能的条件设定为交流系统1发生对应交流线路的N-1/N-2故障,VSC协同功率调制使能的条件设定为LCC发生换相失败后延时启动;紧急功率支撑控制的功率变化量PSCC是根据相关故障后交直流系统功率变化计算得到的,具体计算逻辑见2.3节。
2.2 惯性支撑协调控制分析
不考虑相关网损因素,故障过程中系统1和系统2频率平衡方程如式(2)所示。
(2)
式中:ΔPS1和ΔPS2为系统的等值机机械功率变化量,下标1和2分别表示系统1和系统2;ΔPL1和ΔPL2为负荷功率变化量,ΔPL1=KL1Δf1,ΔPL2=KL2Δf2,KL1和KL2为负荷频率特性;Δf1和Δf2为系统频率变化量;ΔPVSC为VSC功率变化量;ΔPLCC为LCC功率变化量。
发电机转子运动方程如下[16]:
(3)
式中:Δω为角速度变化量;Tj为发电机组惯性时间常数;D为阻尼系数;ΔPm为原动机输出机械功率变化量,受发电机组调速器的作用,ΔPm也为Δf的函数,Δf为系统频率变化量;ΔPe为电磁功率变化量。
以交流系统1发生N-2故障为例,协控系统策略为LCC协同功率调制使能,VSC协同功率调制不使能,图4中VSC比例积分带反馈的直流频率控制器表示为传递函数,如式(4)所示。
(4)
则直流功率变化如式(5)所示:
(5)
综合式(2)、(3)、(5),可得:
(6)
当交流系统1发生N-2故障时,发电机输出功率曲线接近0,发电机转子在过剩转矩的驱动下不断加速;故障清除后发电机输出功率运行点发生改变,但由于转子速度已大于同步转速,虽然转子已经开始减速,但相对角度依然处于增大的过程。转子持续处于减速过程会到达机械功率Pm和电磁功率Pe平衡点,但同步转速依然高于转子速度,相对角度继续减小;当机械功率又大于电磁功率后转子又进入加速状态,开始第二次振荡过程;若没有能量损耗则会出现往复振荡。本文利用直流惯性支撑协调控制策略计算得出的ΔPVSC和ΔPLCC,增大直流系统的正阻尼作用,为系统提供足够的减速面积,改善交直流混联系统的惯性支撑和阻尼支撑。
2.3 动作时序
图4中的惯性支撑协控系统相当于整个交直流混联系统的大脑和中枢,通过采集系统中的实时状态量,确定故障类型,然后执行LCC/VSC的惯性支撑协调控制、紧急功率支援(功率快速提升/回降)、切机等指令。
针对1.2节所涉及的典型故障类型,考虑直流进行惯性支撑和辅助一次调频,设计协控系统的动作时序如下:
1)交流系统1发生N-1/N-2故障:断面CS-WX发生N-2故障,系统1存在失稳风险;协控系统接收双回线开关分位信号同时判定线路有功功率变为0,认为出现N-2故障,向VSC发送指令启动频率控制模式,VSC根据频率偏差计算得到Pfmod_VSC进行频率调制,为交流系统1提供足够阻尼抑制振荡;同时协控系统向LCC发送指令以使能LCC协同功率调制功能,以及根据VSC频率调制计算得到的功率调制量,进行协同功率调制,将能量波动传导至相对最强的交流系统3;此控制过程仿真算例见本文3.2节。
2)交流系统2发生N-1/N-2故障:断面LQ-DL发生N-2故障,系统2存在失稳风险,控制逻辑如下:
(1)协控系统接收双回线开关分位信号,同时根据故障前线路有功功率,计算并查表得到需要切除的电厂4机组出力值Plost。
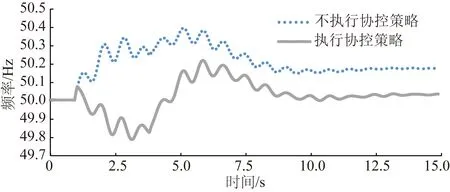
(2)根据VSC接入交流系统1的强度和需求,设定VSC进行紧急功率回降的上限值为额定功率的10%即250 MW;设定故障后柔直理论需要回降的功率量为PVSC_comp=0.125×Plost,若PVSC_comp<250 MW,且PVSC_comp (3)协控系统同时向LCC发快速提升有功功率量PSCC_LCC,两回直流的功率紧急支援量根据其接入的交流系统短路容量按比例进行分配,本文所述方式下PSCC_LCC=1.5×PSCC_VSC(若协控系统实时收到的LCC可提升功率量PLCC_limit (4)协控系统根据VSC和LCC可提升/回降功率量,计算得到电厂4切机量Pgen=Plost-PSCC_VSC-PSCC_LCC,发送到电厂4执行选择切机。 3)交流系统1或2发生跳机故障:系统1发生跳机故障,协控系统接收电厂跳机信号和机组出力损失量Plost,向VSC发快速回降有功功率量PSCC_VSC=Plost,同时向LCC发快速回降有功功率量PSCC_LCC=PSCC_VSC;系统2发生跳机故障,协控系统收电厂跳机信号和机组出力损失量,并发LCC快速回降有功功率量+VSC快速提升有功功率量,功率分配比例同上述第2)点,这里不再赘述。 4)LCC直流换相失败:LCC单次换相失败将造成交流系统2出现200~300 ms的短时有功缺额,协控系统收换相失败信号后执行LCC功率快速提升,向VSC发送指令以使能VSC协同功率调制功能,并延时启动LCC/VSC频率调制,抑制系统频率波动;本部分相对复杂,将在后续论文中展开阐述。 5)LCC直流单极闭锁:单极闭锁后,协控系统接收LCC的故障闭锁信号,判定功率损失量PLCC_lost,根据2回直流接入点的交流系统短路容量,按系统强度配比在线计算得到VSC直流快速回降功率量PSCC_VSC=0.4×PLCC_lost,同时交流系统2执行切机Pgen2=0.6×PLCC_lost,交流系统1切机量按欠切考虑;通过以上控制逻辑,使系统恢复至新的稳定运行点,具体仿真案例见本文3.2节。 对本文所述系统,在机电暂态等值电网数据基础上,利用PSCAD/EMTDC建立交流系统1和交流系统2等值电网电磁暂态仿真模型,网架结构和模型参数与机电暂态模型完全一致。其中,发电机模型配置调速系统、励磁系统和电力系统静态稳定器;LCC直流输电系统为典型±500 kV接线方式,额定输送功率为3 000 MW,控制保护系统采用与实际直流控制保护系统基本一致的仿真模型[17]。VSC直流的控制采用传统的功率/电压外环和电流内环的控制结构,其中电流内环控制器采用dq解耦控制,外环控制器采用定直流电压控制、定有功和定无功控制[18-20]。交流系统3采用无穷大电源+等值阻抗方式进行建模。 本文所涉及的混联系统协调控制策略在1.2节所述5种故障型式下均有相应逻辑执行动作。本节以其中2种故障情况进行分析和仿真验证。 1)交流系统1断面CS-WX发生N-2故障。 CS-WX发生N-2故障后,利用目前直流通用的频率控制器+回降VSC功率+配合切除交流系统1相应机组才能够使交流系统1恢复到新的稳态运行点,但是会影响到交流系统2的功率平衡。根据前面分析的功率特性曲线以及图4的整体控制策略,考虑利用VSC进行频率调制来为系统提供足够的惯性支撑和辅助一次调频,使系统恢复到原稳态运行点,避免VSC回降造成交流系统2的功率不平衡;由于VSC频率调制过程中功率持续波动和变化,考虑混联系统的网架结构和特性,同时对LCC进行协同功率调制,避免交流系统2的功率波动,实际上是将交流系统1的稳定问题由VSC和LCC的接续式传导,转为由短路容量更大的交流系统3来承担。 采用惯性支撑协调控制策略前后的仿真结果对比如图5所示。 图5(a)为交流系统1频率对比,其中虚线为故障后VSC采用工程现有控制策略的曲线,实线为VSC应用本文提出的惯性支撑控制策略后的曲线。由图可见,VSC在合适的参数配置下进行频率调制后,为系统提供了惯性支撑,降低了系统故障后第一次上摆幅值,且明显抑制了后续振荡过程,避免系统失稳,系统能够恢复稳定运行,且稳态运行点未发生改变。 图5(b)为交流系统2频率对比,其中虚线为LCC不进行功率调制,实线为LCC进行协同功率调制。由图可见,LCC跟随VSC进行频率调制后,系统2频率第1次和第3次下摆、第1次上摆大幅减小,整个动态过程的频率更快恢复至稳定状态。 图5(c)中红色曲线为LCC单极有功功率,蓝色曲线为VSC单单元有功功率。由图可见在VSC进行频率调制的过程中,在协调控制逻辑的作用下,LCC跟随VSC进行协同功率调制,功率变化趋势一致。 图5 惯性支撑协调控制策略仿真波形Fig.5 Waveform of coordinated control strategy for inertia support 2)LCC发生单极闭锁故障。 不考虑过负荷能力的情况下,LCC发生单极闭锁后将损失一半的有功功率1 500 MW,根据图4整体控制逻辑及2.3节所述策略,执行以下动作时序(均以单极闭锁为0时刻): LCC发生单极闭锁故障—50 ms VSC执行功率回降600 MW—100 ms执行交流系统1切除200 MW发电机—100 ms执行交流系统2切除900 MW发电机。执行本策略的仿真结果如图6所示。 图6给出了是否执行协控策略的交流系统2频率对比,其中虚线为不执行协控策略的曲线,实线为执行协控策略的曲线。由图可见,在发生LCC单极闭锁故障后,如不执行协调控制策略,系统频率最大波动至50.4 Hz且稳定在新的高周运行点;对混联系统执行协调控制,能够大大减小系统频率波动且很快恢复至额定频率运行。 图6 LCC单极闭锁后系统频率仿真波形Fig.6 Frequency Waveform of LCC monopole block 本文中提及的其余故障类型均设置相应的协调控制策略并进行了仿真验证,以改善故障后整个混联系统的动态恢复特性,由于篇幅原因,在此不再赘述。 LCC/VSC混联系统包含2回不同类型的直流,连接3个交流系统,对于系统内的交/直流故障,应充分发挥VSC和LCC快速可调的特性,实现系统的最优控制。 本文考虑利用多类型直流对整个混联系统提供惯性支撑和辅助一次调频,设计了涵盖VSC和LCC直流、交流线路、发电机组的多区域间惯性支撑协调控制系统;核心在于提出了直流频率控制策略和多类型直流之间协同功率调制控制策略,整定了与系统短路容量、直流输送功率水平相匹配的适应性参数;通过集成开关状态采集、直流功率指令下发以及切机指令下发等功能,最终实现了VSC、LCC和交流系统间的惯性支撑协调控制。 通过仿真研究系统内可能引起失稳的几种典型交/直流故障,在所提出策略的作用下系统能更快恢复至新的稳定运行状态,验证了本文提出的策略对改善系统故障后动态恢复特性的作用。 下一步将根据VSC潮流方向的变化,扩展协调控制功能,以进一步适应实际系统运行需求和多种应用场景。3 仿真分析
3.1 仿真建模
3.2 故障分析与控制策略验证

4 结 论
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16湖南电力(2022年3期)2022-07-07 08:56:36中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06家庭影院技术(2021年3期)2021-05-21 02:15:00铁道通信信号(2020年5期)2020-09-21 09:21:34制造技术与机床(2019年7期)2019-07-22 03:42:24电子制作(2018年17期)2018-09-28 01:57:02中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23小学科学(学生版)(2016年1期)2016-10-09 01:53:02铁道通信信号(2016年10期)2016-06-01 12:10:51