
基于无人机的输电线路工程图像采集研究
2022-05-06 13:32李海龙刘金慧张志国王照华刘晓龙
电子设计工程 2022年8期
李海龙,刘金慧,张志国,王照华,刘晓龙
(国网辽宁省电力有限公司,辽宁沈阳 110004)
近几年来,随着我国电力工程建设的迅速发展,电力网的输电线路长度不断增加,满足了社会工业和生活用电的持续增长需求[1]。以现在的发展速度,到2030 年,中国的输电线路将达到240 万千米,并网规模位居世界第一。
由于高压输电线路地域覆盖范围广,受复杂地形和自然环境(如雷击、大风冰雹、强对流天气等)的影响,或受外力破坏,造成线路故障[2]。一旦输变电线路发生故障,那么整个配电站将难以正常运行,严重影响工业、交通、医疗卫生等多个部门的正常运转,给人们生产生活带来极大不便[3]。因此,必须对输电线路进行定期检查维护,以保证电力系统安全稳定地运行。
基于此,相关学者设计了一种输电线路一体化图像监拍装置,实时采集输电线路状态图像,然后上传到监控中心的软件平台[4]。在此期间,工作人员可以通过APP 浏览监控照片,及时分析处理现场情况,快速排除险情。该设备需要无线网络传输图像数据,可以实时监控,但其角度固定不变。若被外界干扰物遮挡,将影响采集效果。
为解决这一问题,文中提出了基于无人机的输电线路工程图像采集方法。智能无人机因重量轻且可从任何角度对线路巡视,以及受干扰程度小而成为巡视输电线路的有效工具。
1 工程图像采集装置
基于无人机的工程图像采集装置如图1 所示。

图1 基于无人机的工程图像采集装置
如图1 所示,在无人机上搭载相机组,图像采集卡分别与相机组和嵌入式板连接,最后嵌入式板与内存板连接,嵌入式计算机通过图像传输模块和数据传输模块进行传送[5]。
相机组由多个摄像机组成,摄像机的一端与图像采集卡相连,另一端与可扩展USB 插槽的图像采集卡连接,而可扩展USB 插槽与嵌入板上的串口相连。图像传输模块包括图像传输天线和图像接收天线,其中图像传输天线通过编码器连接到嵌入式板,图像接收天线通过解码器连接到笔记本电脑;数据传输模块包括数据传输天线和数据接收天线,其中数据传输天线与嵌入式板连接,数据接收天线与笔记本电脑连接,两个天线可以相互收发数据[6-8]。
将手提电脑放到地面,打开电源,将无人机与摄像机连接并启动,然后在手提电脑操作与照相机组拍摄下,开始无人机的飞行巡检工作[9]。
2 工程图像采集流程设计
在无人机采集图像数据之前,需要根据业务需求提前制订任务计划,并对测试区域进行了解。
步骤一:设置航拍参数。将航高、像片重叠度、航线这3 个参数作为航拍参数进行设置。
1)计算航高。通过检查所测区域的地理位置,根据相关业务需求,对所测区域的地形和存在的遮挡进行不同比例的航拍,并选择图像的地面分辨率[10-12]。通过比例尺和地面分辨率的对比来确定图像的地面分辨率,结果如表1 所示。

表1 比例尺和分辨率分析
根据式(1)计算航高:

式中,H表示航高;f表示物镜焦距;a表示像素元尺寸;k表示航空摄影地面分辨率[13]。
2)像片重叠度。按照测绘行业的技术规范和标准,结合被调查地区的地理因素和有关业务要求,图像重叠度应满足纵向重叠度不小于1/2,横向重叠度不小于1/8。
3)航线。根据航测范围大小确定航程和航程长度,式(2)和(3)分别用来计算拍摄到的图像的基准长度和行宽。

式(2)、(3)中,S表示实际拍摄长度;D表示实际无人机航拍轨迹间隔宽度;Lx、Ly分别表示拍摄到的像幅长和宽;Px、Py分别表示航向和旁向重叠度[14]。
步骤二:调整无人机拍摄参数。为使调整效果更好,用户在笔记本电脑上输入相关指令,通过数据传输模块传输给嵌入板。嵌入板可将拍摄参数根据相应的指令发送到笔记本电脑,用户可根据拍摄参数对无人机实时飞行的拍摄效果进行评估,及时调整无人机的拍摄参数,以达到最佳拍摄效果[15]。
步骤三:画面数据编码。拍摄的实时图像数据由嵌入板通过编码器进行编码,并通过图像传送天线将编码后的图像数据传送至地面终端接收天线。
步骤四:数据传输。图像传送接收天线接收图像资料并传送给解码器,解码器解码实时图像资料并传送给笔记本电脑。
步骤五:基于无人机工程图像三维重建。以无人机工程图像为基础的三维重建无人机摄影测量系统,利用倾斜摄影测量技术,通过无人机搭载摄像机从多角度获取地面图像,快速生成三维模型[16]。
三维重建的目的就是为输电线路工程建立适合于图像采集的结构模型,能够在无线网络环境下对三维数据进行分析与处理。图2 中显示了三维投影和重建的过程。从图2 可以看出,三维重建过程是相机成像的反过程,了解照相机的成像过程,就能更好地进行三维重建。无人机获取的图像序列都是二维的,因此使用二维图像序列来重建传输线的三维结构模型。

图2 三维投影与重建流程
摄像机模型有4 个坐标系,关系如图3 所示。
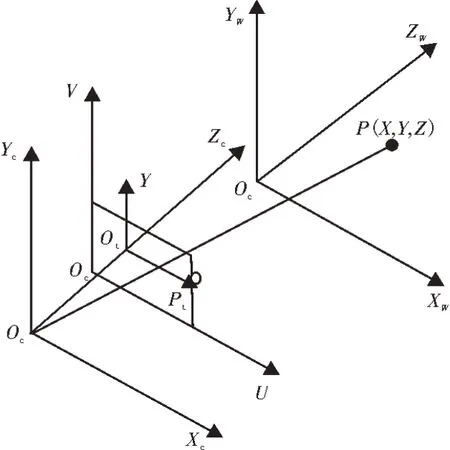
图3 四大坐标关系
图3 中,P(X,Y,Z)点投影与图像素坐标系之间的关系如下所示:

式中,R、T表示无人机拍摄到的动态信息;n表示无人机拍摄相机的内部参数。
利用动态数据恢复技术,以无人机拍摄到的动态信息R和T为初始值对新图像进行动态数据恢复。新建的点云对应的特征点占新建点的50%以上,利用最小全投影误差算法对重建点云进行迭代优化,从而对重建点云进行优化。无人机采集到的动态数据由二维图像序列转换为三维结构。
步骤六:图像畸变矫正。由于不同摄像机镜头不同,所以镜头拍摄时都会产生一定的偏差,容易导致原始图像变形失真,其中径向畸变是指镜头半径处失真的表现行为是镜头中心光线比其余光线弯曲,这一变形在普通的镜头中更为明显,如图4所示。

图4 径向畸变示意图
由图4 可知,成像仪光轴中心基本没有失真,但是从镜头半径到边缘的失真越来越严重。前者的失真由几个围绕泰勒级数展开的数学模型的主要部分来描述,而后者的失真一般可由O1、O2两个部分来描述。也就是说,对于这样一个失真的大鱼眼透镜,可由数学模型来描述。成像器在某一点上,可根据其径向分布进行调节,调节公式为:

式(5)中,(x0,y0)表示发生畸变初始位置;(x,y)表示畸变校正后位置,径向畸变后,点位偏移与光心距离不同的点。修正结果是成像点距离光心越远,径向位移越大,说明成像失真越严重。当光心附近像点基本无偏差时,校正完毕。
步骤七:图像保存。无人机在飞行中到达预定地点后,根据系统预设的飞行路径和预定的地理位置信息,使用笔记本电脑调用OpenCV 截图功能,直接捕获当前笔记本电脑显示的不同摄像机的实时图像,并将捕获的图像数据保存到该电脑中。
步骤八:画面显示。摄像机通过数据采集卡将数据交换后的实时图像传送给嵌入式面板,嵌入式面板再将图像采集结果传递给计算机,最终由计算机LED 屏幕显示采集结果[17-18]。
3 实验与分析
以某输电线路为研究对象,应用该研究设计的基于无人机的输电线路工程图像采集方法进行详细测试。
3.1 实验装置与环境
选取阴天、大雾、大雪的实验场景,如图5 所示。

图5 实验场景确定
实验中使用DJI和DNaN 飞行控制软件对无人机进行控制。无人机配置参数为:延迟拍摄时间要求在2.0 s 以内;飞行高度可达到150 m;拍摄图像分辨率为1 080 P;焦距为25 mm;偏航角度是60°;拍摄时以水平方向为拍摄轨迹,横向拍摄8张,纵向拍摄8张。
3.2 实验结果与分析
对比在不同场景下,输电线路一体化图像监拍装置和文中设计的基于无人机的图像采集方法的应用效果,对比结果如表2 所示[19]。

表2 两种方法图像分辨率对比分析
分析表2 所示结果可知,使用输电线路一体化图像监拍装置最高分辨率为1 920×1 080,最低为640×480。而应用文中设计的基于无人机的图像采集方法后,最高分辨率为2 048×1 080,在大雾和大雪环境下也可以将分辨率保持在1 920×1 080 的水平。因此,设计的基于无人机的图像采集方法的应用效果更好。
4 结束语
文中提出的基于无人机的输电线路工程图像采集方法结合了动态数据恢复技术,重新构建输电线路工程三维图像,并矫正图像径向畸变,大大提高了图像分辨率。
虽然该研究在提高图像采集质量方面取得了一定研究成果,但仍存在问题,需后续进行深入研究,如在传输线工程中,图像重建的效果还有待提高。因此,在接下来的研究中,将充分考虑线轮廓形状的规律性,将传输线轮廓的先验知识引入三维重建中,进一步提高图像采集效果。
猜你喜欢
西南交通大学学报(2022年5期)2022-11-03
金属热处理(2022年3期)2022-04-09
北京航空航天大学学报(2021年6期)2021-07-20
中华养生保健(2020年7期)2020-11-16
英语文摘(2020年2期)2020-08-13
软件(2020年3期)2020-04-20
东南大学学报(自然科学版)(2020年1期)2020-01-16
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
腹腔镜外科杂志(2016年12期)2016-06-01
