
仓货场景中的光流与超宽带定位
2022-05-05 09:21:08郭鑫宇李玉杰吴子昂
数字通信世界 2022年4期
吴 昊,郭鑫宇,李玉杰,吴子昂,杨 宁
(南开大学滨海学院,天津 300270)
0 引言
为了满足不断增长的国民货运需求,物流行业蓬勃发展,各大物流公司应运而生。仓储业务作为各物流公司的主要经营业务和重要盈利中心,其作业效率、作业能力和服务水平可以对企业产生直接影响,因此,对仓储作业的优化改革迫在眉睫。在大型的高位货架仓库中,选用体积小,使用方便,机动性强的无人机代替人工进行货物检视和盘点不失为一种好的选择[1]。UWB是一种用于测距、定位和跟踪的超带宽通信的无线电技术,超宽带无线信号具有传输速率髙、功耗低、抗干扰能力强、穿透性强、定位精度髙等优点,是一种发展前景广阔的室内实时定位技术。基于UWB定位技术的无人机精准定位系统结合光流辅助定位、二维码识别等技术,就可以对货架上存放的货物进行盘点[2]。借助无人机底部的智能摄像头,采用光流算法计算两帧的位移,实现对无人机的高精度定位。而对于二维码识别技术,随着移动互联网的迅速发展,二维码应用已经渗透到了生活的各个角度,它具有信息量大,可靠性、保密性、防伪性强等优点,无人机与之合作的仓储作业方案将仓储管理水平提高到一个全新的高度。
本项目拟开发一个仓货场景中的光流和超宽带定位系统。传统无人机定位主要采用GPS方式,此种方法快速、廉价但准确性较差且在室内几乎无法使用,与传统的GPS定位系统不同,超宽带(UWB)近场通信技术由于其抗干扰能力强、精准度高,在一些特定环境下可以辅助乃至完全替代GPS定位。在大型的高位货架仓库中,货物检视和盘点是一项费时费力的工作,且人工盘点的准确性仅有89%左右,而无人机结合UWB、光流、二维码识别等技术,就可以对货架上存放的货物信息进行捕捉,从而实现货物盘点。
1 系统总体结构
系统采用超宽带定位技术、光流定位技术、二维码识别技术,实现无人机的精准定位和货物识别。融合超宽带定位模块和光流传感器数据得到无人机的精准坐标,实现精准定位。无人机达到指定坐标后,机载相机扫描二维码得到货物信息,借助服务器作为上层应用进行数据存储以及数据显示,再以MySQL数据库为数据存储系统,即可将打包的信息传输至服务器的数据库中。借助Fastadmin框架搭建监测平台,使数据实时显示在Web页面上,方便查询。系统总体流程图如图1所示。
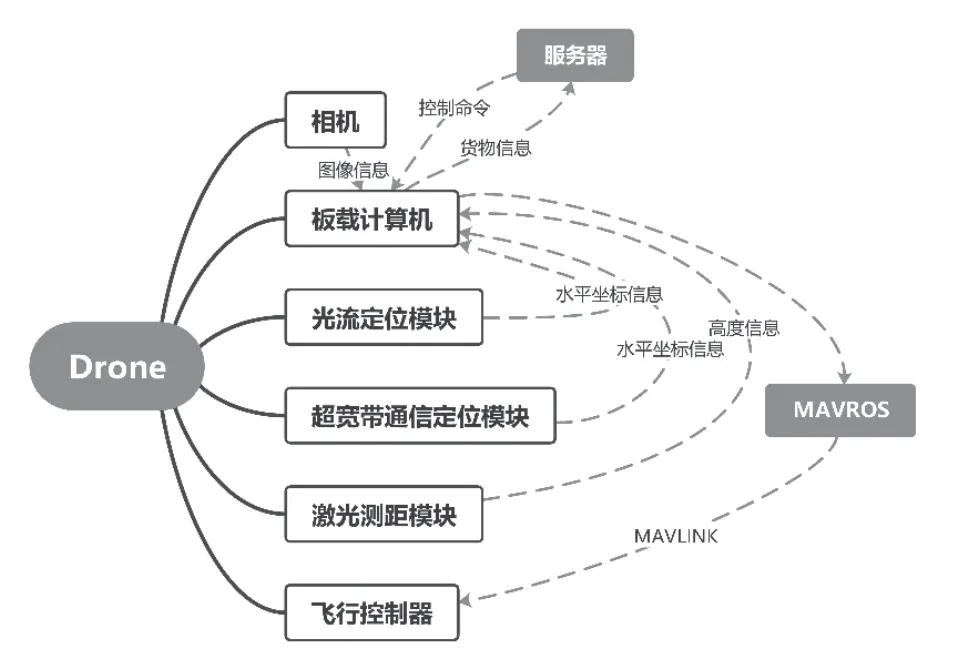
图1 系统总体流程图
所搭建系统实物图如图2所示。

图2 场景搭建实物图
2 系统硬件技术
系统硬件设计主要由PX4 Flow、UWB定位等模块组成。
2.1 光流定位技术
光流是在无人机上光流定位,是测速算法,它借助无人机底部的一个摄像头采集图像数据,采用光流算法计算两帧图像位移,实现对无人机的定位,即利用光流测试再积分定位。在室内没有信号时,也可以实现对无人机高精度定位,实现更加平稳的控制,同时具有良好的抗噪能力。它通过检测图像中光点和暗点的移动,来判断图像中像素点相对于飞行器的移动速度。所谓光流定位,其实就是利用光流测速再积分定位。
基于梯度的方法又称为微分法,它利用时变图像灰度的时空微分(即时空梯度函数)来计算像素的速度矢量。通过加权矩阵的控制对梯度进行不同平滑处理。典型代表是Horn-Schunck光流计算方法。
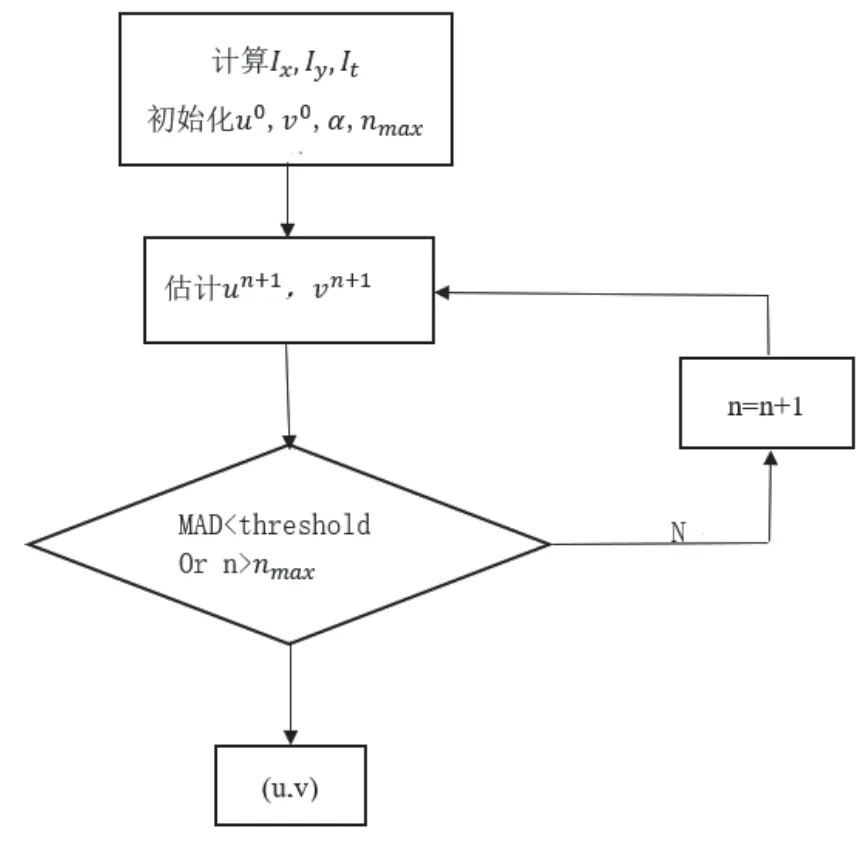
图3 光流计算流程图
光流的计算欧拉方式

光流计算方式
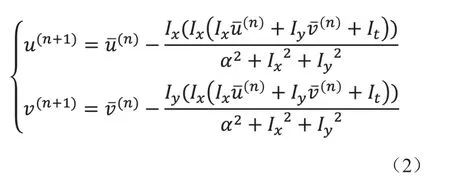
在光流的计算方法中,很多方法基于如下的光流约束方程

式中,I是图像上点(x,y)的灰度;(u,v)是该点的光流;Ix、Iy、It分别是灰度相对于x、y、z的偏导。

这就称之为基于梯度的方法。
对于基于梯度法的光流定位,它的刷新速率快,短时精度高,并且易于实现。但基于梯度法的光流定位其本质是依靠计算明暗像素点的偏移速度,其位置估计则是对偏移速度的积分,在累计误差的影响下,依靠光流定点的无人机还会出现水平漂移。
2.2 TDOA与TWR定位算法以及UWB定位技术
2.2.1 飞行时间差——TDOA定位算法
TDOA是一种利用时间差进行定位的方法,是一个稳定可靠的基于网络化的定位方式,是基于多站点的定位系统,对信号进行定位必须有至少3个以上的检测站进行同时测量。通过测量信号源的距离,确定信号源的距离,然后利用信号源到各个监测站的距离(以监测站为中心,距离为半径作圆),确定信号位置。但是绝对时间一般比较难测量,通过比较信号到达各个监测站的绝对时间差,就能画出以监测站为焦点,距离差为长轴的双曲线,双曲线的交点就是信号的位置。
TDOA值的获取:利用移动台到达2个基站的时间TOA,取其差值。这时需要基站时间的严格同步,但是当两基站间信号传输特性相似时,可减少由多径效应带来的误差。
根据到达时间差获得的TDOA方程为

算法示意图:

图4 TDOA算法示意图
与其他定位技术相比,TDOA算法不存在相位模糊问题,测向基线可不受控制,系统复杂度低,同时定位精度较高。但是在TDOA系统中,各个基站的时钟必须严格同步。
2.2.2 双向测距—— TWR定位算法
TWR是一种双向测距算法。定位基站分为主基站和从基站,一个主基站对应四个从基站,主基站主要负责和定位引擎进行通信,需要的基站数量总体较多。基站通过无线电波在基站与标签之间进行三次飞行(标签-基站-标签-基站),然后算出基站与标签之间的距离。
TWR算法大大缩短了标签的待机时间,并且它的定位精度高于TDOA。
2.2.3 UWB定位技术
UWB定位超宽带LinkTrack S/P室内测距模块,是一个能通信的定位系统,具有高精度、高频率、低延迟以及可靠性高等特点,集定位、导航、通信、授时于一体。通过室内布置四个已知坐标的定位基站,需要定位的定位标签按一定的频率发射脉冲,不断和几个基站进行测距,然后通过一定的精确算法定出标签的位置。
优点:超宽带定位依赖于基站定位,坐标位置明确,不会出现累计误差,而且穿透力强,功耗低。
缺点:由于超宽带通信定位受非视距影响较大,即使有冗余基站补偿和NLOS优化算法,纯粹依靠UWB模块也很难实现高精度的定位。上层应用端做平滑处理后会产生时间滞后,也会影响定位效果。
2.3 超宽带定位与光流定位融合
面对单一传感器定位的各种不足,人们已经想出了将各种传感器融合的方法。例如,常见将IMU和光流融合定位、IMU和UWB融合定位,这些办法在实际应用中已经取得不错的效果。UWB和光流的优缺点恰巧互补,下面主要讨论如何使用一阶互补滤波融合这两种传感器的数据实现无人机的高精度室内定位。
问题假设:我们已有两路数据,光流可以获取实时的对地速度,UWB能够获取位置信息,采样间隔为Ts。两者只涉及高频和低频的噪声,且有以下线性关系

即光流测量值等于光流真实值加上光流低频噪声,UWB测量值等于UWB真实值加上高频噪声。
于是我们让两个传感器分别通过高通滤波器和低通滤波器求和得到理想姿态,即
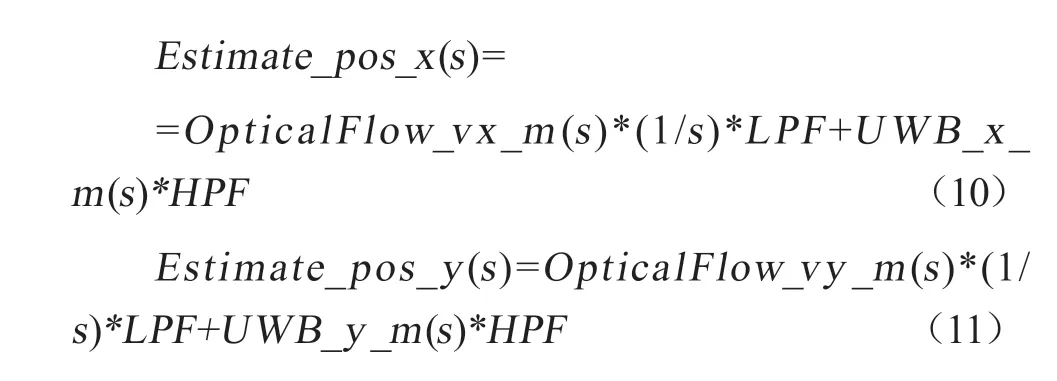
程序中常用一个简化系数k代替滤波器的功能,则有算法如下
我们假设飞机在x,y轴方向均以一定速度移动,每隔一段时间得到UWB、光流和融合后的定位坐标值。
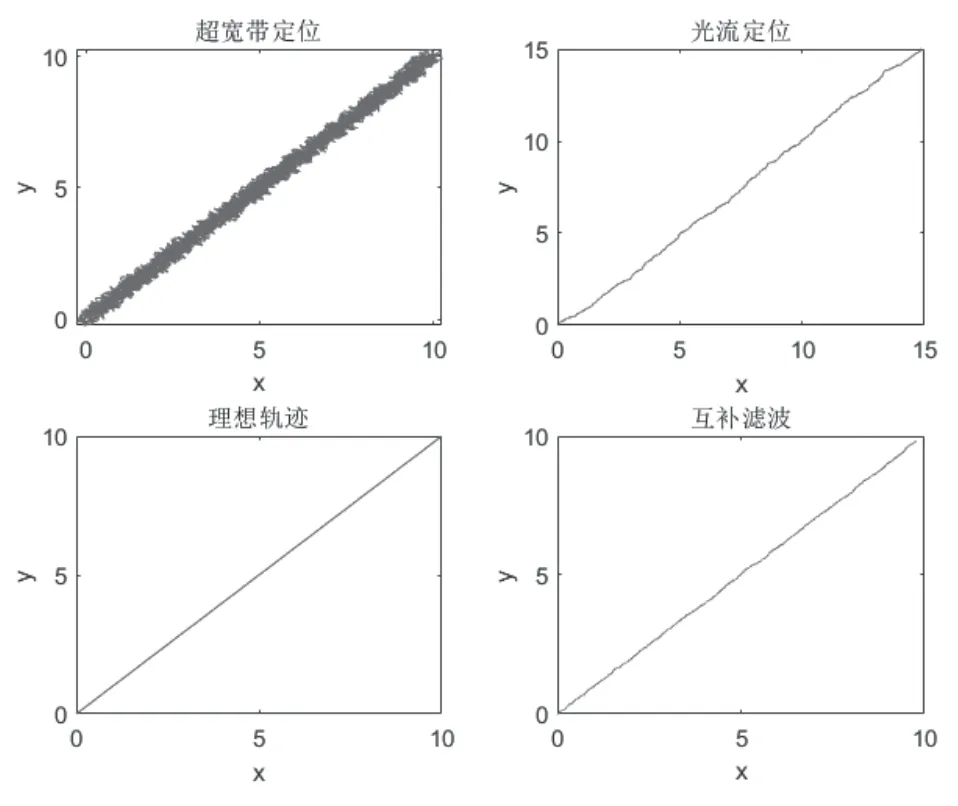
图5 UWB、光流定位数据和滤波后数据对比图
经MATLAB仿真验证,能够从图中观察到UWB的高频噪声和光流的累计误差,单独使用两种传感器进行定位效果并不理想,滤波后的无人机的位置轨迹和无人机运动的理想轨迹相符合,融合后的定位效果对比单个传感器定位效果有显著提升。
3 无人机上层控制设计
3.1 PX4固件和MAVROS
PX4-Autopilot是国外知名的开源无人机项目,其固件支持板载计算机和飞控通过MAVLINK通信,实现对无人机的状态读取和上层控制。MAVROS是ROS中支持MAVLINK通信的软件包,开发者能够利用ROS工具和MAVROS软件包,编写外部控制程序,向无人机发布控制指令。
激光定高模块、光流模块、UWB模块通过TTL转USB芯片接入板载计算机,板载计算将激光定高数据、光流和UWB滤波后的数据传入“/mavros/vision_pose/pose”话题中,实现无人机的三维定位。修改无人机的飞行状态,发布位置和速度期望,实现无人机的位置控制功能。
3.2 服务器端程序设计

图6 定位数据显示界面
无人机机头搭载智能相机,opencv程序识别二维码,每个货物箱上的二维码将以“货物编号/货物名称/存放日期/描述”格式存储信息。扫描到货物信息之后,通过TCP发送到服务器端,货物信息将被实时记录下来并保存到服务器端的数据库中,方便操作员可以从网页中轻松的查找到入库记录。
4 结束语
本文设计了一个用于仓货场景的光流与超宽带定位系统,该方案包括以下步骤:获取仓库中货物信息数据库;获取货物信息数据库中各个货物对应的物品信息和货物分区信息,获取每个货物分区的分区巡视路径规划地图;获取检视和盘点指令信息并解析,从而得到待检视和盘点货物的信息,使得无人机根据该分区巡视路径规划地图进行分区直飞巡检,从而获得实际检视和盘点的货物数据。更重要的是,无人机结合UWB、光流定位、二维码识别等技术,就可以读取大型的高位货架仓库上存放货物的数据,能够对独立的货物进行单独检视和分区盘点,以达到节省时间、人力物力资源。
猜你喜欢
导航定位学报(2022年5期)2022-10-13 08:35:28
成都信息工程大学学报(2022年2期)2022-06-14 03:36:28
动漫星空(2020年10期)2020-10-29 06:57:00
电光与控制(2018年10期)2018-10-13 08:19:00
雷达学报(2018年3期)2018-07-18 02:41:12
雷达学报(2017年1期)2017-05-17 04:48:51
电子制作(2016年11期)2016-11-07 08:43:34
新农业(2016年13期)2016-08-16 12:12:41
江苏年鉴(2015年00期)2015-11-15 06:32:06
中国铁道科学(2014年6期)2014-06-21 06:35:32
