
基于改进传播算子的双基地多输入多输出雷达参数估计
2022-05-05 02:57:08王家珂吴云韬巩朋成
武汉工程大学学报 2022年2期
王家珂,吴云韬*,巩朋成
1.智能机器人湖北省重点实验室(武汉工程大学),湖北 武汉 430205;2.武汉工程大学计算机科学与工程学院,湖北 武汉 430205
受启发于通信领域中的多输入多输出系统,Fisher等人首次提出将多输入多输出(multipleinput multiple-output,MIMO)技术引入到雷达系统,从而构建出一种全新的雷达体制即MIMO雷达。MIMO雷达通过发射端同时发射出多个相互正交的信号,在接收端经过匹配滤波处理,分离出各个发射信号,获得了更大的虚拟孔径,提高了雷达系统的性能。MIMO雷达在参数估计、目标检测、杂波抑制等[1-3]方面相较于传统雷达优势显著,因此成为雷达研究的热点。
MIMO雷达按照发射阵和接收阵的设置方式可以分为单基地MIMO雷达和双基地MIMO雷达。双基地MIMO雷达的回波信号中包含了目标相对于发射阵和接收阵的角度信息,因此可以对目标进行交叉定位。在双基地MIMO雷达的波离方向(direction of departure,DOD)和 波 达 方 向(direction of arrival,DOA)联合估计问题中,文献[4]研究了基础多重信号分类(multiple signal classification,MUSIC)算法估计MIMO雷达方位角的问题,该方法需要进行二维谱峰搜索,因此计算量较大。文献[5]则提出了一种降维MUSIC算法,该算法利用凸优化的方法,将传统二维MUSIC算法中的二维谱峰搜索转化为两个一维谱峰搜索,降低了算法的运算量。文献[6]将求根MUSIC算法应用于MIMO雷达,避免了因谱峰搜索产生的巨大计算量。文献[7]在求根MUSIC算法基础上,增加了酉变换处理,进一步降低了算法的运算量。文献[8]和文献[9]基于均匀线阵的结构,利用其具有的旋转不变性,运用旋转不变子空间(estimation of signal parameters via rotational invariance technique,ESPRIT)算法估计出目标的方位角,文献[9]中ESPRIT算法实现了目标方位角的自动配对。文献[10]提出酉ESPRIT算法,通过前后向平滑技术[11],将接收阵接收到的信号从复数域转换到实数域,有效地降低了运算量,并且估计精度有所提高。文献[12]结合MUSIC算法和ESPRIT算法的优点,提出了ESPRIT-MUSIC算法。文献[13]提出一种改进的传播算子(propagator method,PM)算法,在估计精度接近传统算法的同时,降低了运算量。文献[14]基于MIMO雷达输出信号的张量模型,提出一种多维奇异值分解算法,该算法充分利用多维结构,因此估计精度较传统算法更高。
本文提出一种运用于双基地MIMO雷达方位角估计的改进的PM方法,根据传播算子[15]定义要求,提取存在旋转不变结构的数据求得协方差,组合相关数据矩阵,使用前后向平滑方法求得传播算子,根据其内部结构特征求出旋转不变因子,估计出DOD和DOA的值,从而实现双基地MIMO雷达DOD和DOA的联合估计。
1 信号模型
在双基地MIMO雷达系统结构中,假设其发射阵和接收阵分别为m个阵元和n个阵元的均匀线阵,阵元间距均为d=λ/2,λ为波长,发射阵同时发射m个正交信号S∈[s1,s2,...,s m]T∈ℂm×L,L代表单个脉冲内的采样点数,由于各信号之间彼此相互正交,因此存在等式SSH/L=I m。假设存在K个远场目标,则第k个目标的DOD和DOA可分别用θk和φk来表示。则接收阵列接收到的第q个脉冲信号用矩阵形式表示为
式中,A t=[a t(θ1),a t(θ2),...,a t(θK)]和A r=[a r(φ1),a r(φ2),...,a r(φK)]分别为发射阵和接收阵的导向矩阵,其 中a t(θk)=[1,ej2πdsinθk/λ,...,ej2π(m-1)dsinθk/λ]T为 第k个 目 标 发 射 导 向 矢 量 ,a r(φk)=[1,ej2πdsinφk/λ,...,ej2π(n-1)dsinφk/λ]T为第k个目标接收导向矢量。Λq=diag(c q),其中,c q=[α1,q,α2,q,...,αK,q]T,αk,q表示第k个目标在第q个脉冲时目标的反射系数,N q是均值为零的高斯白噪声矩阵。将X q右乘SHL进行匹配滤波,并将结果向量化以增加虚拟阵列孔径,最后将Q个脉冲信号排列成一个mn×Q维信号矩阵可得

式中,⊙表示Khatri-Rao积,C=[c1,c2,...,c Q],N表示匹配滤波过后的高斯白噪声矩阵。
2 改进的PM方法
观察双基地MIMO雷达匹配滤波输出的信号矩阵Y,用选择矩阵选择前(m-1)n个阵元和后(m-1)n个阵元输出数据,分别记为Y1和Y2,用选择矩阵选择前m(n-1)个阵元和后m(n-1)个阵元输出数据,分别记为Y3和Y4,则有
其 中,J t,1=[I m-1,0],J t,2=[0,I m-1],J r,1=[I n-1,0]及J r,2=[0,I n-1]为选择矩阵,I为单位矩阵,0表示零 向 量 。 由 式(3)和 式(4)得(J t,2⊗I n)(A t⊙A r)=(J t,1⊗I n)(A t⊙A r)Φt,其 中Φt= diag(ej2πdsinθ1/λ,ej2πdsinθ2/λ,...,ej2πdsinθK/λ),由 式(5)和式(6)得(I m⊗J r,2)(A t⊙A r)=(I m⊗J r,1)(A t⊙A r)Φr,其中Φr=diag(ej2πdsinφ1/λ,ej2πdsinφ2/λ,...,ej2πdsinφK/λ)。
对数据矩阵Y1和Y2进行处理,假设(J t,1⊗I n)(A t⊙A r)=A,则存在(J t,2⊗I n)(A t⊙A r)=AΦt,首先根据传播算子的定义有B=[AT(AΦt)T]T,矩阵A可以被分解为A=[AT1AT2]T,其中A1表示矩阵A的前K行,A2表示矩阵A的第K+1到(m-1)n行。同样,可以把B分解为B=[AT1BT2]T,其中B2由B的第K+1到2(m-1)n行组成。假设A1是非奇异的,传播算子P可以被定义为一个唯一的线性算子形式

其中,H表示共轭转置。
以Y1和Y2为例,将选择矩阵处理过后的数据矩阵组合表示为得到样本协方差矩阵R=ZZH/Q,并对其进行前后向平滑处理可得R fb=(R+JR*J)/2,其中J为大小为2(m-1)n的反对称矩阵,将R fb分解为

其中,R1和R2分别表示R fb的前K列和后2(m-1)n-K列,基于样本协方差矩阵的传播算子的最小二乘解可以表示为

从A和B的分解形式可得

另一方面,可以将的共轭转置矩阵分解为

其中,A2,A1Φt,A2Φt的维度与的维度一一对应。根据式(7)对比式(10)和式(11),可以得到
由式(12)可得

其中,#表示伪逆,将式(14)带入式(13)中可得

式(15)表明矩阵Φt的对角线上元素的估计值可以由的k个特征值得到,相应的特征值分解可得

其中,diag(λ1,λ2,…,λk)为Φt的估计值,因此DOD的估计值可以表示为

给定另一个传播算子V,处理数据Y3和Y4,重复上述步骤得到,从而得到diag(v1,v2,…,vk),DOA的估计值表示为

由于DOD和DOA是分开估计的,使用最大似然估计法对其进行配对,得到正确的方位角估计结果。
3 仿真实验
采用仿真实验将所提出方法与文献[16]中传统ESPRIT算法和PM算法进行对比,通过3组仿真实验来验证所提出方法的有效性。考虑一个发射阵和接收阵均为等距线阵的双基地MIMO雷达系统,阵元间距为半波长,假设远场存在两个目标,它们相对于发射阵和接收阵的方位角分别为(θ1,φ1)=(10°,15°),(θ2,φ2)=(25°,35°),500次蒙特卡洛仿真的均方根误差定义为RMSE=其中,和分别表示目标DOD方位角的θk和DOA方位角的φk在第l次蒙特卡洛实验中的估计值。
图1是利用本文所提出方法在发射阵元数m=10,接收阵元数n=10,信噪比为10 dB,脉冲数Q=50时进行100次蒙特卡洛实验目标定位的结果。由图1可以看出,本文所提出方法能有效估计出多目标二维方位角。

图1 改进方法目标定位结果Fig.1 Target location results of improved method
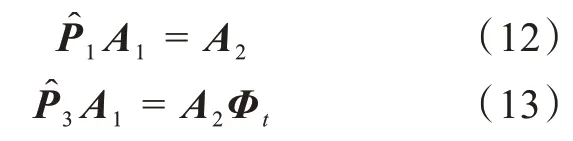
图2显示了本文所提出方法与传统ESPRIT算法和PM算法目标估计均方根误差随信噪比变化关系。实验中,发射阵元数和接收阵元数分别为m=10,n=10,脉冲数Q=50。从图2可看出,随着信噪比的增加,各算法性能均有提升,与ESPRIT算法和PM算法相比,本文所提出方法估计精度更高,并且与传统PM算法相比,在低信噪比情况下本文所提出方法更加稳定。
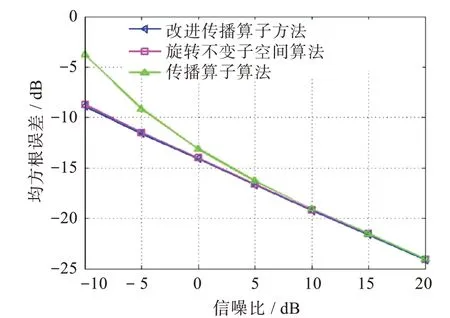
图2 目标估计均方根误差随信噪比变化关系Fig.2 Root mean square error of target estimation versus signal to noise ratio
图3显示了本文所提出方法与传统ESPRIT算法和PM算法目标估计均方根误差随脉冲数变化关系。实验中阵元数m=10,n=10,信噪比为5dB。从图3可看出,随着脉冲数Q的增加,各算法估计精度均有提高,且本文所提出方法较ESPRIT算法和PM算法,估计性能更好。
图3 目标估计均方根误差随脉冲数变化关系Fig.3 Root mean square error of target estimation versus number of pulse
4 结 论
以上阐述了一种基于改进PM算法的双基地MIMO雷达方位角估计方法。该方法根据传播算子定义要求提取存在旋转不变结构的相关数据,组合相关数据求得协方差,采用前后向平滑方法求得传播算子,根据其内部结构特征求出旋转不变因子,估计出DOD和DOA的值。该方法较传统ESPRIT算法和PM算法具有更好的估计性能,并且在低信噪比情况下与传统PM算法相比性能更加稳定,仿真实验表明该方法在方位角估计精度上有所提高。
猜你喜欢
数学物理学报(2021年2期)2021-06-09 08:54:26
卷宗(2021年2期)2021-03-09 07:57:24
应用数学(2020年2期)2020-06-24 06:02:44
空间科学学报(2020年4期)2020-04-22 01:17:04
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
数学物理学报(2016年3期)2016-12-01 05:36:27
河南科技(2015年18期)2015-11-25 08:50:14
