
康复机器人上肢的模糊PID和神经网络阻抗控制
2022-05-04 02:45穆海芳
济宁学院学报 2022年2期
穆海芳 郭 凯,2 胡 波
(1.宿州学院 机械与电子工程学院,安徽 宿州 234000;2.安徽省智能机器人信息融合与控制工程实验室,安徽 芜湖 241002)
由脑卒中、脑梗死造成的中枢神经系统损伤,会导致患者的肢体运动功能出现障碍,严重影响患者的生活质量。借助康复医师进行康复训练是一种恢复肢体运动功能的传统方法,但这种方法不仅成本高,而且治疗效果主要取决于医师的技术水平和临床经验,导致康复效率比较低[1]。随着机器人技术的发展,将机器人技术用于康复治疗成为一个热点,康复机器人技术可以弥补康复医师的不足[2]。
现代康复训练中,阻抗控制是一种有效的力控制方法,在训练时为患肢提供一定的阻力,帮助肢体完成康复训练[3]。根据现代偏瘫治疗学原理,肢体运动功能的恢复过程大致分成三个阶段,每一个阶段的病情变化很大,在恢复训练过程中,如果能够根据患者肌力的恢复情况,给患者提供的阻力能够相应的调整,则将在一定程度上激发肢体的自主康复能力,大大提高康复效果[4]。目前阻抗控制广泛应用于康复机器人的运动控制中,目标阻抗参数决定了整个系统的性能,而在传统的阻抗控制方法中,目标阻抗参数一经确定后,在整个控制过程中保持不变,这就大大降低了阻抗控制的性能[5]。神经网络是一种模拟人脑的神经网络以期能够实现类人工智能的机器学习技术,控制器使用的神经网络大多是基于静态的前馈神经网络,采用反向传播(back-propagation,BP)算法对网络进行训练[6,7],阻抗控制与智能控制技术结合可以实时调整目标阻抗参数,提高控制性能。
传统PID算法具有简单易用的优点,在控制系统中广泛使用,但其参数固定不变,在复杂非线性系统中很难使用[8]。而模糊算法不需要精确的数学模型,用于PID参数的整定,可以实时调整PID的参数值,弥补传统PID算法的不足[9,10]。
在患肢进行康复训练过程中,为了给患者提供更好的康复训练体验,本文提出了一种模糊PID神经网络阻抗控制器,包括两个模块:即位置控制模块,使用模糊PID算法;阻抗控制模块,使用神经网络调节参数。通过仿真实验验证该方法对上肢康复机器人手臂的控制效果。
1 总体结构
整个系统的结构是由模糊PID控制器和神经网络阻抗控制器组成,模糊PID控制器用于位置控制,而神经网络实现阻抗控制,如图1所示。
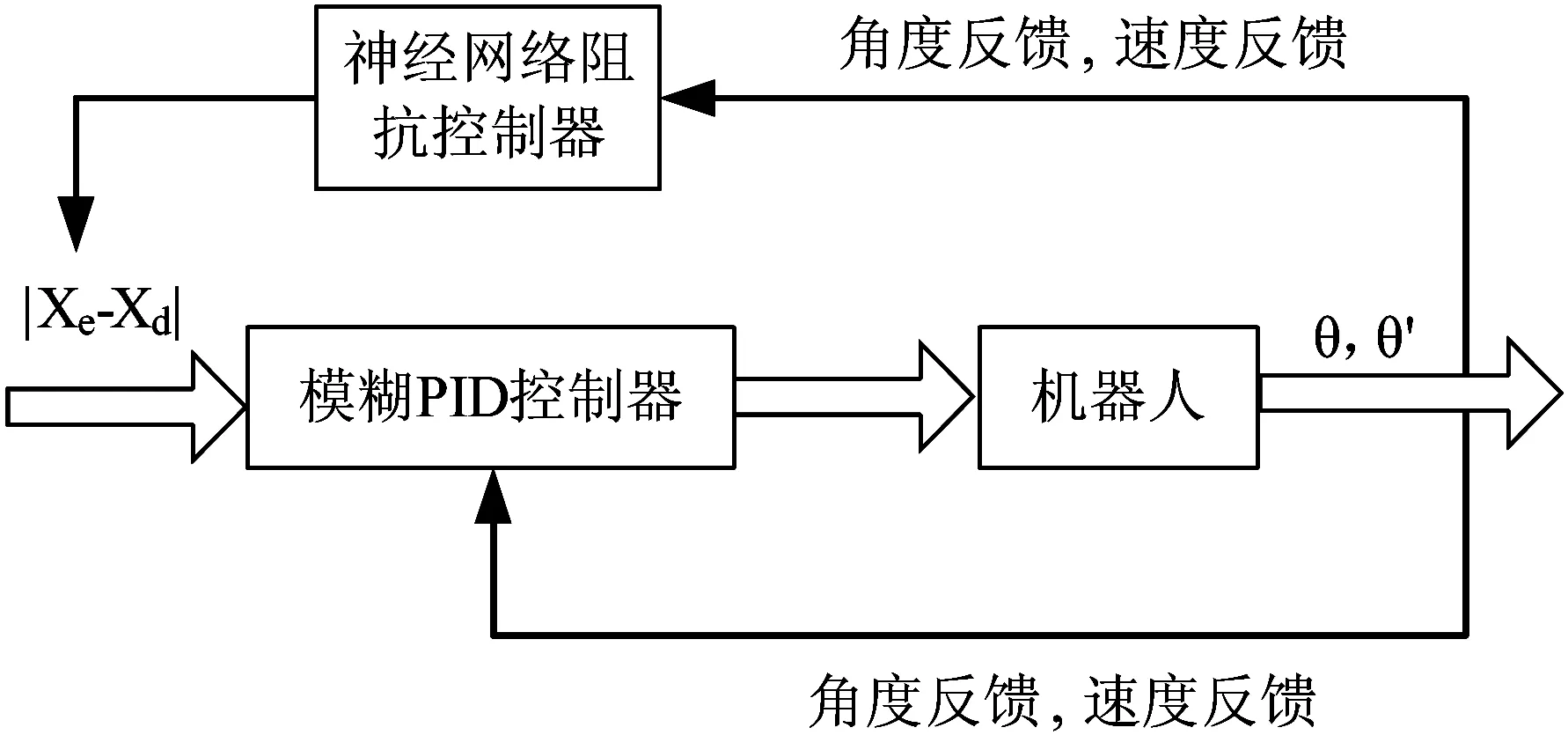
图 1 控制系统结构图
θ是关节角度,用来衡量机器人上肢的位置,θ'是角速度,用来衡量患者上肢与机器人接触力的大小,Xe是实际位置,Xd是期望位置。
2 模糊PID位置控制
模糊PID算法主要用于机器人上肢的运动轨迹和位置跟踪控制,PID控制器的参数可以使用模糊数学理论实时调整,以达到最优控制目标。如图2,PID控制器的输入输出量分别为e(t)和u(t),模糊控制器的输入变量为Δθ、Δθ',输出量为比例系数kp、积分时间系数ki、微分时间系数kd。
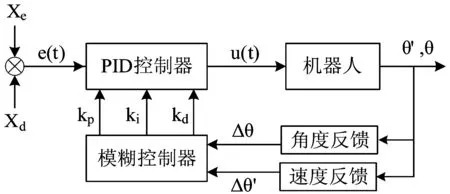
图 2 模糊PID控制器
由于比例项在机械臂的位置跟踪实验中对跟踪性能的影响最大,因此设计一模糊逻辑控制器,它的输出是可以实时调整的kp,经实验总结得到控制逻辑:当Δθ较大时,应增大kp;当Δθ为中等值时,应保持kp为较小值;当Δθ较小时,应保证kp的取值大一点。设θ增大为正,减小为负,采用三角形隶属度函数的模糊子集得到逻辑推理规则如表1所示。
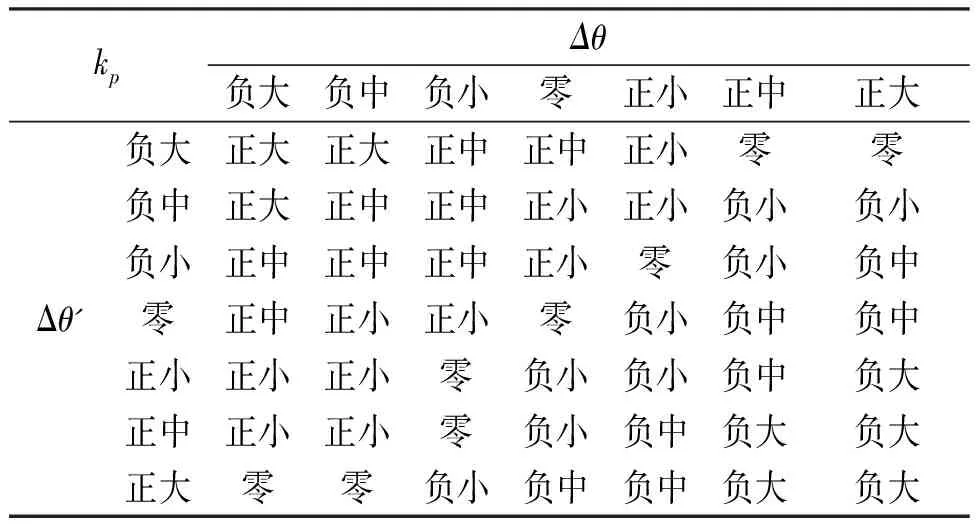
表 1 模糊逻辑推理规则表
3 神经网络阻抗控制
康复机器人辅助训练初期,由于患肢的病情严重,所以常进行被动康复训练,即患肢按照预定的轨迹完成康复运动。经过一段时间的被动训练,患肢病情缓解,这时应将被动训练方式改为主动训练,充分发挥肢体的自我恢复能力。如果目标阻抗系数是固定不变的,则不能够适应患肢病情的变化,而基于神经网络的阻抗控制器可以实时调节阻抗系数,以适应患肢康复进度的变化。为了使患肢能够自主实时调整运动轨迹,基于神经网络阻抗控制方法建立了患肢和机械臂之间作用力和位置的动态关系,阻抗控制与力/位置混合控制方法相比,稳定性更好,不需要切换控制模式,目标阻抗控制模型表示如下:

(1)
其中,M是目标惯性矩阵,B是阻尼矩阵,A是刚度矩阵,X是位置量,X′是速度量,X″是加速度量,Fe是实际接触力,Fd是期望接触力。
为了保证患者的安全,在进行康复训练时,患肢的运动速度都比较慢,所以患肢运动的加速度可以不用考虑。这里取上肢机械臂关节矢状面,假设仅仅做单自由度旋转运动,则在笛卡尔坐标系下,机械臂末端的目标阻抗模型表示如下:
fe×rd=b(θ'd-θ')-a(θd-θ)
(2)
其中,fe表示机械臂与上肢的交互力,rd表示选择半径,b∈B,a∈A,θ表示关节实际角度,θd表示关节期望角度。
如图3所示,神经网络阻抗控制器包括刚度控制器和阻尼控制器,刚度控制器的输入变量为力偏差Δf和角度偏差Δθ,输出为变刚度量ΔAd(t),阻尼控制器的输入变量为力偏差Δf和速度偏差Δθ′,输出为变阻尼量ΔBd(t)。
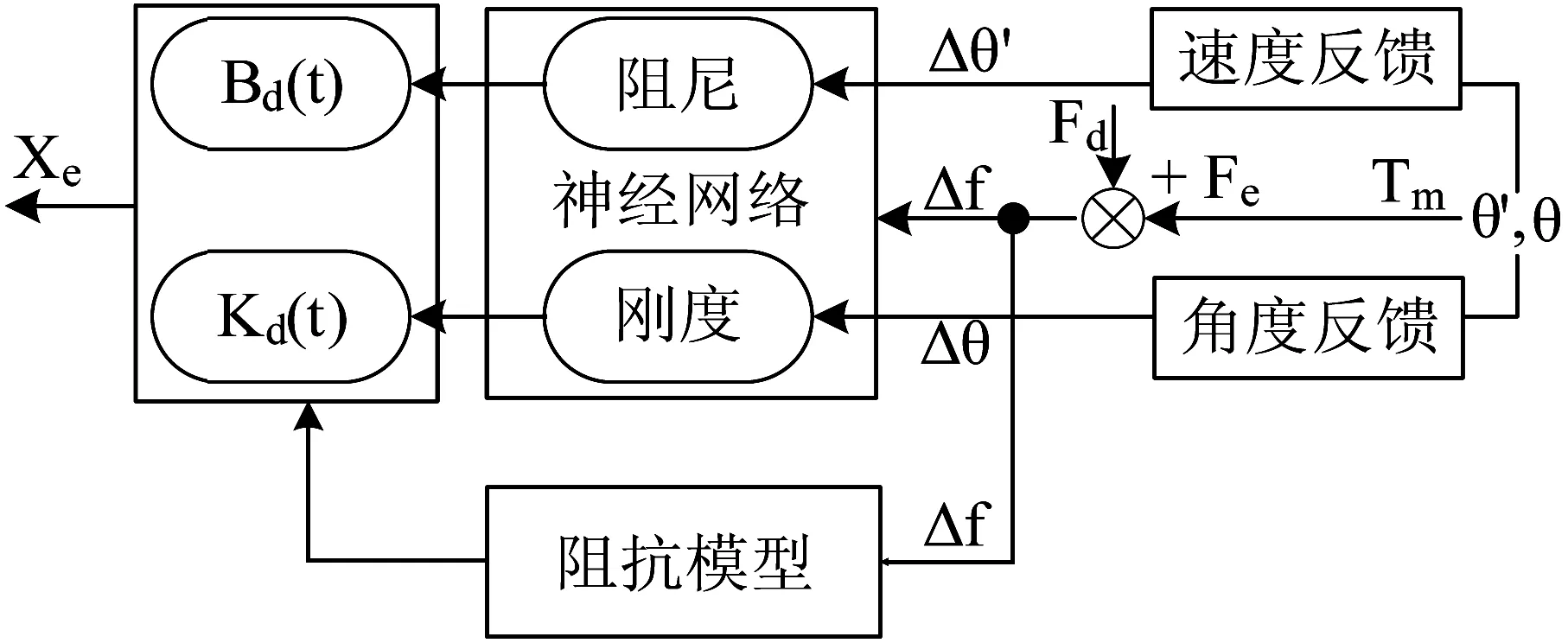
图 3 神经网络阻抗控制器
采用的神经网络是基于误差反向传播算法(BP)的3层前向神经网络,使用BP算法的学习时,前向传播是在采集信息后,经输入层处理传给隐含层,经隐含层再传给输出层。如果此时在输出层得到的输出量不能满足需求,则进一步进行处理,即反向计算在前向传播路径中的误差信号,不断调整网络权值以实现误差信号的减小,直到获取所需的输出量,这就是反向传播。刚度控制器的神经网络结构如图4,阻尼控制器的神经网络结构与之类似。
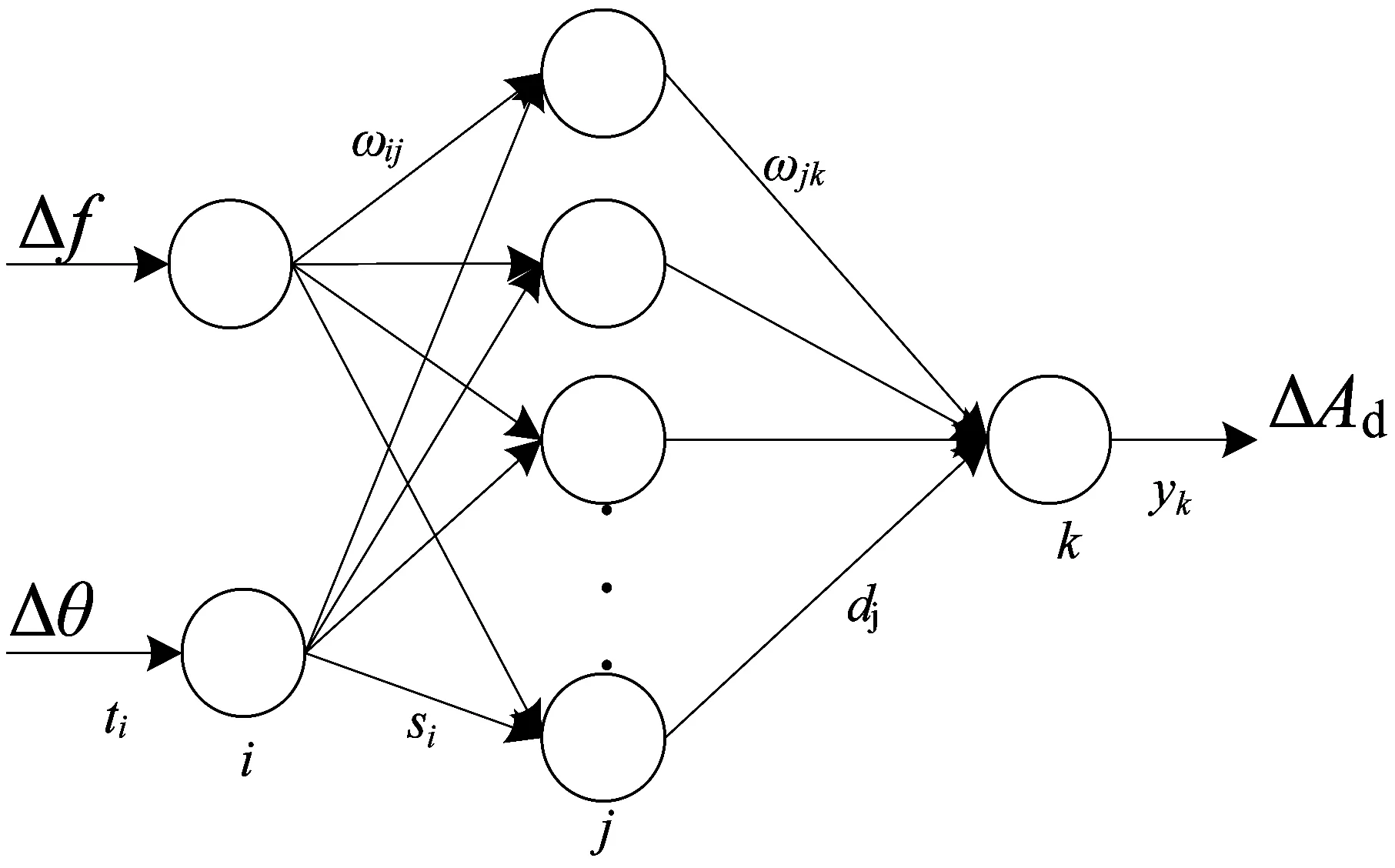
图 4 神经网络刚度控制器
图中网络的输入层是i,隐含层是j,输出层是k,Δθ、Δf是神经网络的输入量,用ti表示,i对应输入量的个数,取2。Si作为隐含层的输入,dj为输出,ωij为隐含层输入权重系数,ωjk为隐含层输出权重系数,yk是神经网络的输出量。输入层、输出层、隐含层的表达式如下:
(3)

=f(ω1jΔf+ω2jΔp)
(4)
(5)
隐含层的激活函数选择Sigmoid函数:
(6)
假设g(k)是上肢控制系统的实际输出,则网络的性能指标函数可以表示为:
(7)
根据梯度下降法对输出权值进行计算:
(8)
ω(k)=Δω+ω(k-1)+β[ω(k-1)-
ω(k-2)]
(9)
其中,α是学习速率,β是动量因子。
4 仿真实验
为了验证本文所提方法的有效性,选择某二自由度康复机器人上肢,使用Matlab软件,在Simulink环境下作仿真实验。初始选定刚度系数360N/m,阻尼系数80Ns/m,神经网络的学习速率0.080,图5中关节角度轨迹作为目标曲线,当期望运动轨迹的幅值和频率固定,从传统控制方法与本文控制方法实际获取的运动轨迹,可以看出本文方法的效果要好。为了进一步分析两者的效果,设定变频变幅的期望轨迹,两个方法得到的实际轨迹如图6所示,可以看出本文方法不仅能够满足控制要求,而且柔顺性和协调性也较好。
使用跟踪误差来评价控制精度,图7是期望轨迹为固定幅值和频率运动曲线的误差比较图,图8是变频变幅的误差比较图。
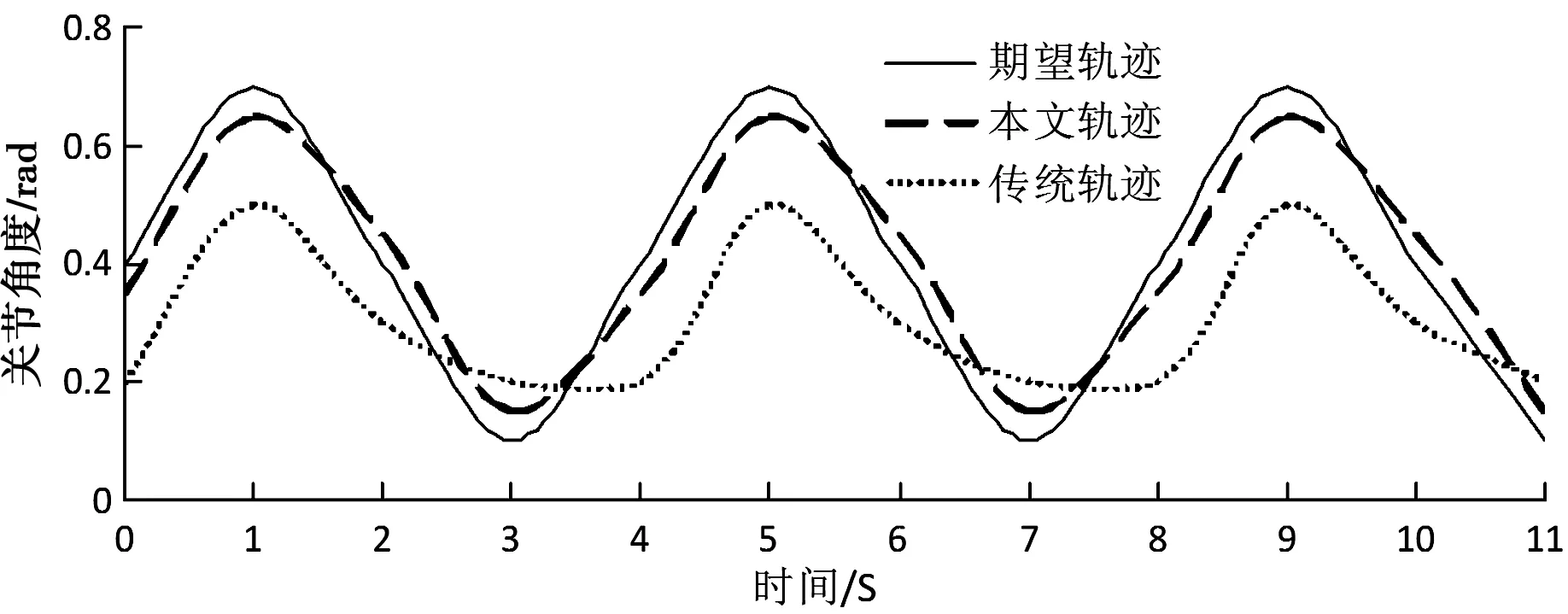
图 5 固定频率固定幅值的仿真运动轨迹

图 6 变化频率变化幅值的仿真运动轨迹
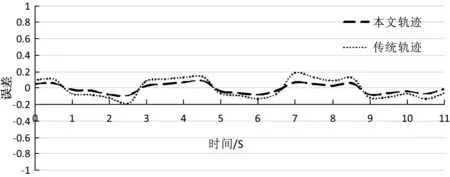
图 7 固定频率固定幅值的跟踪误差
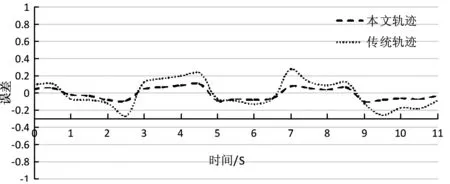
图 8 变化频率变化幅值的跟踪误差
为了测评协调能力,定义均方根误差:
(10)
其中,n是采样次数,Ti是实际运动轨迹对应的采样点,T是期望轨迹对应的采样点,得到跟踪误差、均方根误差的值如表2所示,u表示跟踪误差值。
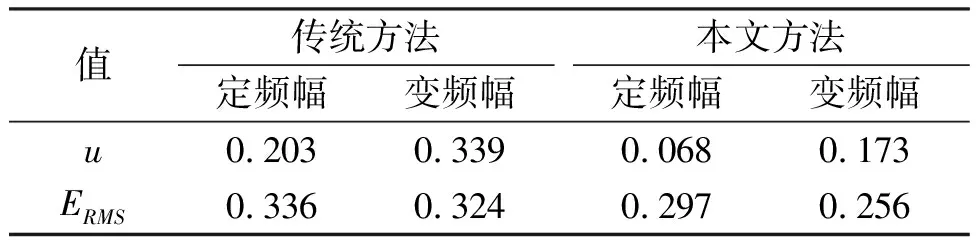
表 2 不同方法的误差值对比
从图7和图8以及表2可以看出,无论是固定频率幅值还是变化频率幅值的期望运动轨迹,本文方法控制的实际运动轨迹不仅响应速度快,而且跟踪误差也较小,同时,均方根误差和平均偏差反映的运动协调能力也较强。
5 结论
为了在使用机器人辅助肢体运动功能障碍患者进行康复训练时保证训练的柔顺性,本文利用阻抗控制原理建立了上肢训练机器人的目标阻抗控制器,提出了一种模糊PID算法结合神经网络阻抗控制的策略,模糊PID模块主要用于训练轨迹的跟踪控制,神经网络主要用于实时调整目标阻抗参数。仿真实验结果表明,与传统的控制方法比较,本文方法控制的运动轨迹响应较快,跟踪误差较小,协调性能指标较好。
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31
装备制造技术(2020年11期)2021-01-26
中华养生保健(2020年2期)2020-11-16
浙江临床医学(2020年9期)2020-10-10
中国生物医学工程学报(2019年6期)2019-07-16
中国自行车(2018年4期)2018-05-26
制造业自动化(2017年2期)2017-03-20
天津护理(2016年3期)2016-12-01
中国民族医药杂志(2016年7期)2016-05-09
中国当代医药(2015年17期)2015-03-01
