车辆前泊车辅助系统间歇性误报警问题研究
2022-05-04 12:11:34徐磊
汽车电器 2022年4期
徐 磊
(同济大学汽车学院,上海 201804)
随着智能驾驶技术的快速发展,越来越多的车载新技术应运而生,例如HUD抬头显示、ACC自适应巡航、360环视和PDC泊车辅助控制等,这些技术在一定程度上解放了驾驶员的大脑和双手,让人们真正体会到了智能驾驶技术带来的便利与舒适。据统计,95%以上的车辆制造商都具备了智能驾驶技术,在未来几年,几乎所有车辆都将会搭载智能驾驶模块。但是,对于360环视摄像头、PDC泊车辅助控制传感器等模块,其传输的都是模拟信号,很容易受到外界的电磁干扰,因此对车内的电磁环境要求非常高。而随着车载新模块和新零件的不断增加,很多零件会在有限的整车布置空间内尽可能地靠近,这就导致车内电磁环境变得更加复杂。此时若忽略了骚扰源与敏感体的安全布置距离,就有很大可能出现敏感体零件无法正常工作的情况,例如360环视界面出现水波纹、PDC误报警等,这样不仅会给车内乘客带来非常不好的用车体验,严重时还会威胁到车内乘客的生命安全,因此,提高零件及整车的电磁兼容性能比以前任何时候都重要。
1 PDC介绍
当驾驶员停车或低速行驶时,PDC将通过前超声波传感器检测车辆前方的障碍物,一旦检测到障碍物,系统将通过声音和可视距离显示警告驾驶员。声音报警的蜂鸣声间隔频次与车辆到障碍物的距离相关联:车辆与障碍物距离越近,蜂鸣声报警频次越高。当驾驶员倒车时,PDC将通过后超声波传感器检测车辆后方的障碍物。
PDC系统包括超声波传感器(发射与接收)、信号控制与处理模块、报警及其辅助模块等。它的工作原理主要是:控制器控制超声波雷达传感器发出一串特定频率的超声波信号,信号经前方障碍物反射回来由雷达传感器接收,见图1;此时通过PDC信号控制与处理模块运算获得两者的时间差值,并利用公式(×)/2计算距离,为车辆与障碍物之间的距离,为超声波在空气中的传播速度,为超声波雷达发射与接收到超声波的时间差。
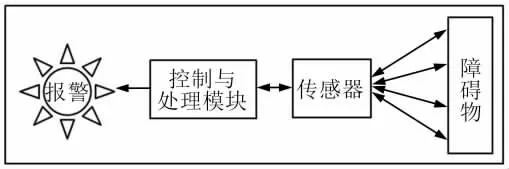
图1 PDC系统工作原理图
超声波雷达的接收前级是弱小信号,很容易受到车内或外界复杂电磁环境的干扰,而汽车在工作时,大部分驱动电机都会工作,此时车辆内部或外部都会有很强的电磁辐射,因此在PDC设计或安装时都需要考虑抗干扰问题。
2 前PDC实车间歇性误报警失效案例
2.1 问题描述
车辆在低速行驶时(20km/h以下),车辆前PDC间歇性发出警示音,提醒驾驶员前方有障碍物,而下车检查并未发现车辆前方存在任何障碍物,因此被定为误报警。该问题的发生让驾驶员无法做出正确的判断,严重影响到用户的用车体验,因此需要对该问题进行排查和解决。
2.2 问题排查分析
从整车零件布局图、前PDC传感器安装和走线位置判断,骚扰源大概率来自车辆前舱。再通过频谱仪及近场探头等辅助工具探测验证,最终锁定前PDC间歇性误报警问题是由于水泵电机电源线上的同频干扰所导致(用示波器测量水泵电机电源线,显示电源线上有频率为46kHz左右幅值450mV的周期性信号,如图2所示,而本车辆PDC传感器的工作频率为48kHz)。问题排查从电磁兼容(EMC)三要素入手,即对骚扰源、骚扰路径及敏感体进行EMC特性分析。同时对实车水泵电机与PDC传感器的布局布线进行检查,最后根据分析检查结果进行针对性整改。

图2 电源线上信号波形
前PDC失效频率在48kHz左右,参考车厂零件管控要求,所对应的零件EMC测试项为磁场发射(20Hz~200kHz)及磁场抗扰度(15Hz~150kHz)两项测试,见表1、表2。

表1 磁场发射频率与限值

表2 磁场抗干扰测试要求
2.2.1 水泵电机
水泵电机为骚扰源,因此对水泵电机进行磁场发射测试,测试结果见图3,其中红色曲线为车厂要求的限值曲线,蓝色曲线为零件实测发射值。从测试图可以看出,水泵电机的磁场发射值均在车厂要求的限值线以下(参考表1),说明水泵电机单体零件磁场发射测试项满足车厂要求。
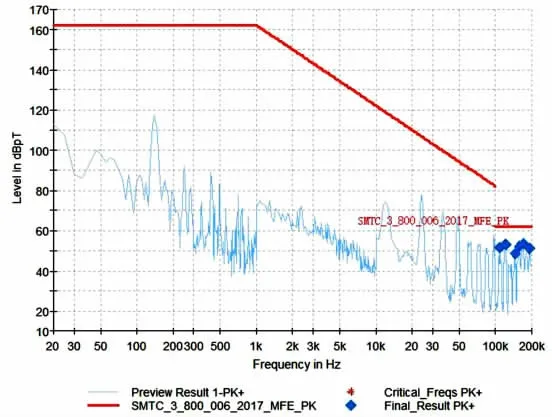
图3 水泵电机接插件处磁场发射测试结果
2.2.2 水泵电机电源线
查看水泵电机的实车布线设计图,发现水泵电机的电源走线环路面积非常大,并且非常靠近右前PDC传感器,见图4。根据EMC理论及经验,骚扰零件的走线环路越大,越靠近敏感体零件就越容易产生EMC问题,由此可得,水泵电机的电源线布线不合理。
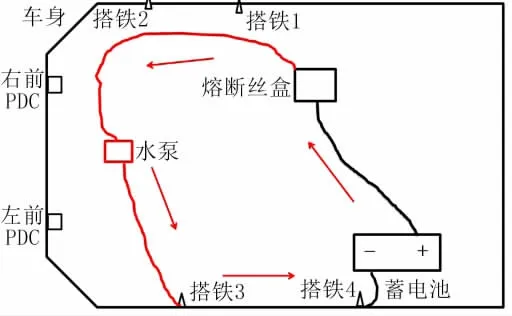
图4 前舱水泵电机与右前PDC传感器布局走线图
2.2.3 前PDC传感器
前PDC传感器为受干扰零件,因此对其进行磁场抗扰度测试,测试结果见表3。从表中可以看出,前PDC传感器在Level1测试条件下出现失效,而根据车厂的企标要求(表2),此零件属于Region II零件,因此在Level 1测试条件下不允许出现任何失效,即前PDC传感器单体零件磁场抗扰度测试项不满足车厂要求。

表3 磁场抗干扰辐射线圈法测试结果
通过以上分析可得,在EMC三要素中,水泵电机单体零件满足车厂要求,水泵电机电源线布线不合理,前PDC传感器不满足车厂要求,后两者都可能导致前PDC系统间歇性误报警问题的发生。
2.3 整改方案制定与实施
通过问题排查分析所得出的结论,分别对水泵电机、水泵电机电源线及前PDC传感器进行针对性整改,再辅以整车问题验证,最终得出前PDC系统间歇性误报警问题的解决方案。
2.3.1 水泵电机整改
水泵电机虽在零件层面满足车厂企标要求,但其作为骚扰源,需尝试从源头降低骚扰信号幅值。从示波器上查看水泵电机电源线上的骚扰信号初始幅值在114mV左右,因失效频率低,故在其他实车原始条件保持不变的情况下,在水泵电机电源线与搭铁线之间增加1000μF电容,用以稳压消除杂波的作用,见图5,此时示波器显示骚扰信号的幅值由450mV降至85mV,见图6,此后前PDC系统间歇性误报警问题未再出现,再将电容移除,PDC失效问题再次复现,因此可证实此措施有效。

图5 电容安装位置
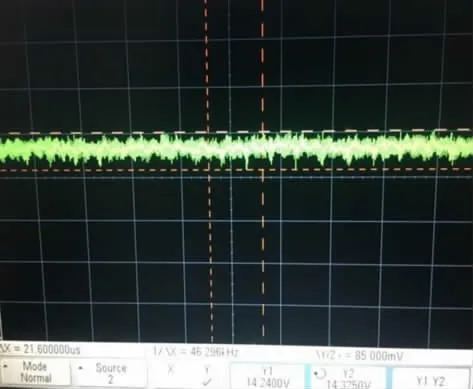
图6 增加电容后电源线杂波幅值降为85mV
2.3.2 水泵电机电源线整改
从电磁兼容三要素来看,骚扰路径是电磁干扰形成的必备条件之一,因此从路径上阻断或降低骚扰源是系统或整车电磁兼容风险控制的重要措施。在实车其他原始条件保持不变的情况下,将水泵电机的电源线搭铁点由搭铁点3改为搭铁点1(图4和图7),此后前PDC系统间歇性误报警的问题未再出现,再将搭铁点改回搭铁点3,PDC失效问题再次复现,由此可证实此措施有效。

图7 搭铁点3改为搭铁点1的电流回路示意图
2.3.3 前PDC传感器整改
由于PDC传感器内部含有磁敏感器件,非常容易受到外界或车内电磁环境的干扰。从此前分析来看,前PDC误报警是由于其受到水泵电机电源线上的空间耦合干扰所导致,而增强零件的屏蔽性能是解决空间耦合干扰的最有效且最快速的措施之一。用铜箔将前PDC传感器包裹,然后对其进行零件磁场抗扰度测试,验证其抗干扰能力是否有提升。通过零件测试结果发现,零件性能得到明显改善,可以满足车厂要求的磁场抗扰度Level2的测试要求,如表4所示。在实车其他原始条件保持不变的情况下,用铜箔包裹前PDC传感器的非探测部分,此时前PDC系统间歇性误报警的问题未再出现,将铜箔去除,前PDC失效问题再次复现,因此可证实此措施有效。

表4 磁场抗干扰辐射线圈法测试结果
2.4 实车解决方案实际可行性分析及选择
通过零件整改及实车反复验证得出,能够解决前PDC间歇性误报警问题的方案共3种:①在水泵电机电源线与搭铁线之间增加1000μF电容;②将水泵电机电源搭铁点更改搭铁点1;③在前PDC传感器非探测部分增加屏蔽罩。但最终方案选取时,还需进行实际可行性分析,详见表5。

表5 解决方案实际可行性评估表
由表5可得,在水泵电机电源口加电容及调整水泵电机电源搭铁点两个方案只能解决现有PDC误报警问题,实车上仍然存在其他未知风险;而在PDC传感器非探测部分增加屏蔽罩的方案,不仅能解决其被水泵电机干扰的问题,而且还能从根本上降低其被车内其他潜在骚扰源干扰的风险;因此,给前PDC传感器增加屏蔽罩被选为解决其间歇性误报警问题的最实际且可行的方案。
3 结论
系统或整车电磁兼容风险评估伴随在整个车辆开发周期,从零部件设计开发到整车布置设计,再到后期实车测试验证等,因此车辆制造商在保证零件电磁兼容性能满足车厂要求的前提下,还要遵循以下原则。
1)前期零件布局布线设计时,将敏感类零件布置在尽可能远离骚扰零件的位置。
2)尽量做到骚扰类零件与敏感体零件既不共搭铁也不共电源。
3)保证所有零件在整车上的走线环路尽可能的小。
车辆制造商只要严格参照企标要求管控零件开发,严格参照整车设计规范进行零件布局布线,就会大幅降低系统或整车电磁兼容失效的风险,降低后期整车整改费用,提高车辆的安全性与舒适性,最终让乘客拥有良好的用车体验。
猜你喜欢
家庭影院技术(2020年11期)2020-12-28 01:22:38
汽车维护与修理(2020年5期)2020-09-04 01:59:26
汽车维护与修理(2019年23期)2019-06-18 09:07:34
汽车杂志(2019年3期)2019-03-26 08:20:54
家庭影院技术(2018年9期)2018-11-02 05:31:30
汽车杂志(2018年5期)2018-06-25 07:44:34
汽车与驾驶维修(维修版)(2017年4期)2017-07-18 11:21:48
汽车零部件(2016年12期)2016-02-23 07:40:30
电脑迷(2015年11期)2015-04-29 00:44:03