常泰长江大桥5号墩沉井基础下沉取土装备研究与应用
2022-05-02 23:59刘修成程茂林陈广飞管政霖
中国港湾建设 2022年4期
刘修成,程茂林,陈广飞,管政霖
(1.中交第二航务工程局有限公司,湖北 武汉 430040;2.长大桥梁建设施工技术交通行业重点实验室,湖北武汉 430040;3.交通运输行业交通基础设施智能制造技术研发中心,湖北 武汉 430040;4.中交公路长大桥建设国家工程研究中心有限公司,北京 100120;5.江苏省交通工程建设局,江苏 南京 210004)
1 工程概况
常泰长江大桥连接常州与泰兴两市,主航道桥为公铁合建双塔双索面斜拉桥,其孔跨布置为(142+490+1 176+490+142)m,是世界首座集高速公路、普通公路、铁路“三位一体”的跨江大桥,也是目前在建的世界最大跨度斜拉桥。
该桥5号墩沉井基础位于泰兴侧,为了减小水流对桥梁基础周围河床的冲刷深度,减轻运营期沉井自重,最终采用了圆端型截面台阶型沉井基础[1]。沉井底部尺寸95.0 m×57.8 m,顶面尺寸77.0 m×39.8 m,沉井总高72 m,其中钢沉井高64.0 m,顶高程+7.0 m,底高程-65.0 m,如图1所示。外井壁宽度1.8 m,内井壁宽度2.0 m,隔墙宽度1.4 m,基础持力层为密实中细砂。
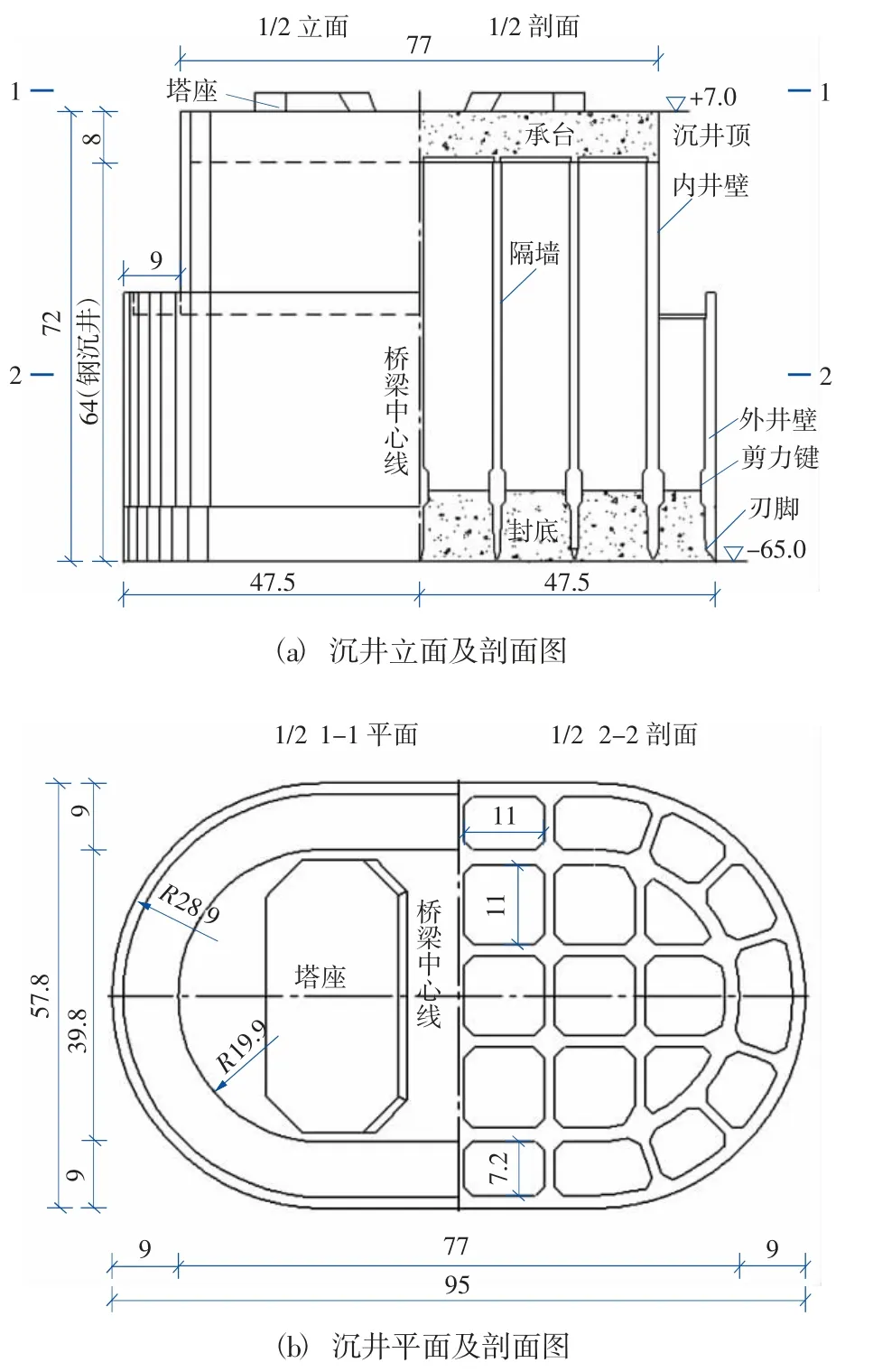
图1 5号桥墩沉井基础(m)Fig.1 The caisson foundation of pier No.5(m)
5号墩桥址处河床平均高程-14.5 m,地质条件以冲洪积的黏性土、砂性土为主,土层不均匀,层底高差大,如表1所示。表层分布4~6 m厚的硬塑粉质黏土层,砂性土地层揭示有砂质胶结层,主要分布在标高-38~-48 m范围。

表1 5号桥墩土层分布情况Table 1 Soil layer distribution of pier No.5 m
为了消除沉井墩位处上层的硬塑粉质黏土层对沉井施工的不利影响,采用抓斗挖泥船对河床底部进行预开挖清除。根据硬塑粉质黏土层分布范围,开挖深度10 m,即开挖至-24.5 m标高,超出硬塑粉质黏土层层底。河床预开挖采取基坑开挖边坡为1∶3,坑底开挖平面尺寸为沉井外轮廓往外延3 m放坡开挖的形式。
2 施工难点
相较于国内外沉井基础,该项目地质条件复杂,沉井体量更为庞大,结构形式尤为新颖,下沉取土施工难点如下:
1)平面尺寸大,沉井取土量达20万m3,此外,较大的平面尺寸使得其外周长与井壁及隔墙底面积之比为0.16,这表明下沉阻力中,端阻力占比较大,下沉过程中遇到承载能力较好的硬质土层时,易出现下沉困难的问题[2]。
2)沉井结构的外形整体为台阶形、平面为圆端形。影响门吊轨道布置,易产生取土盲区。
3)土层复杂,取土难度大。沉井下沉需穿过多层粉质黏土以及砂质胶结层,传统取土设备在此类地层中的作业效率很低。
4)精度控制要求高:沉井下沉过程中,倾斜姿态要求控制在1/150以内。为了保证沉井下沉姿态平稳,内、外井孔泥面需形成“外高内低”台阶[1]。对于黏土层,内井孔取土深度不得超过外井壁刃脚踏面以下2 m。
3 设备研究及取土方法
砂土层由于其流动性较好,在井孔范围内,采用气举取土使井孔泥面开挖低于隔墙底部1 m左右[3-4],即可脱空。而黏土层和胶结砂层具有较好的直壁保持特点,当井孔内泥面开挖至限制标高,沉井仍下沉困难时,采用旋喷钻机对节点进行预搅松,利用气水复合射流[5]破除隔墙下土体。对于内井壁局部难破除区域,则采用机械臂水下取土机器人进行定点清除。沉井盲区破土方法分布如图2所示。
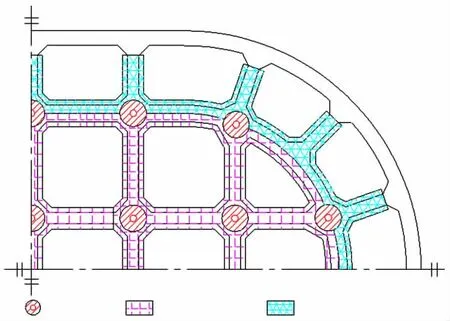
图2 沉井盲区破土方法分布图Fig.2 Distribution of soil breaking method in blind area of open caisson
3.1 自动化气举取土
传统的空气吸泥工艺存在以下弊端:取土作业依靠人工操作,管口与泥面的距离难以达到最优,影响吸泥效率;井孔泥面易出现较大高差,无法做到可控取土;吸泥完成后,泥面标高需通过下放重锤测量,测点少,劳动强度高。
在空气吸泥的基础上,研发了自动化气举取土设备以及门吊集群控制系统。该系统主要由集中控制室、门吊和空气吸泥机组成。作业人员在集控室内,选取待作业的井孔,完成参数设置后,将作业指令通过无线网络发送至门吊PLC控制系统,门吊即可吊运空气吸泥机沿设定的路径和深度进行取土作业。作业过程中,通过监控系统可实时监测设备作业状态和排泥口处泥浆浓度;作业完成后,该系统对井孔泥面标高进行自动测量。
3.1.1 起重设备及其定位系统
为了尽量减小因起重设备布置所引起的取土盲区,根据沉井圆端形的结构特点,门吊轨道布置如图3所示。按单台门吊作业区域覆盖2个井孔、对称布置设备的原则,共配备11台直线行走和4台圆弧形轨道行走门吊,起重量为20 t。由于门吊大车走行下横梁具有一定的宽度,导致在直线轨道与圆弧形轨道交会处存在取土盲区,以及直线轨道无法适应的三角形异型井孔,故这些区域(图3中阴影表示)采用4台起重能力为315 t·m塔吊辅助吊装吸泥管进行吸泥作业,塔吊臂长选用50 m和25 m 2种规格。

图3 门吊及塔吊布置图Fig.3 Layout of gantry cranes and tower cranes
吸泥管在井孔内沿设定路径自动移位的前提是能实时感知吸泥管在井孔中的平面位置。为了实现这一目的,在门吊大车走行、小车走行机构上设置绝对值编码器,小车行走采用齿轮齿条传动,提高定位精度。
在每个井孔的参考原点处设置磁感应开关,门吊移动至该位置时,大车编码器自动归零;在小车行走后停止位设置限位开关,定期对小车编码器进行校准。在电动葫芦起升卷筒上安装绝对值编码器,用于计算钩头下放量,起升机构上还集成有高精度吊重传感器,用于监测吸泥管在作业状态下吊钩上的荷载变化,判定吸泥管是否接触到泥面,并以此为依据控制电动葫芦起升或下放,为实现自动吸泥作业提供支撑。
3.1.2 吸泥机及相关配置
为了提高吸泥作业效率,每个井孔布置一套空气吸泥机,吸泥管和供气管的规格分别为DN250、DN80,在吸泥管口周向均匀分布有3个内径为10 mm的射水喷嘴,水压为2.5 MPa,供水管规格为DN80。吸泥管口设计成锯齿状,并用筋板加强,减小堵管的概率。管节长度分为9 m、3 m、2 m、1 m 4种规格。采用一体化设计,提高管节连接效率和严密性能。
主供气、供水和排泥管道在每个井孔预留法兰接口,空气吸泥机各路管线通过软管与相应主管连接,接口处设置有阀门,以便控制空气吸泥的开闭。上、下游驳船上各配备有15台排气量22 m3/min、排气压力1.0 MPa空气压缩机;5台流量155 m3/h,扬程270 m水泵;4只10 m3气包。气、水通过耐压软管输送至沉井顶面,再由主管道向各井孔供应。
此外,为了改善对粉质黏土层的破土效果,配备有8套可快速安拆的电动绞吸模块,每套包含2台功率30 kW水下电机驱动的2个转动方向相反的三翼刮刀钻头[6]。取土过程中遇到粉质黏土层时,将吸泥机端部的吸泥头更换为电动绞吸模块即可。
3.1.3 自动化取土作业
集控室通过无线通讯对15台门吊进行远程集中控制。数据传输包括集控室发送至单台门吊的作业指令信号,以及门吊反馈给集控室的硬件状态信息、作业数据信息及视频信号等。该自动化气举取土设备具有以下功能:
1)自动调整吸泥管口高程,提高泥水混合物浓度。吸泥管口距泥面过低易堵管,过高吸泥效果不好[7]。因此需要在吸泥过程中随着泥面变化不断调整吸泥管口的高程。
2)吸泥管沿预设路径自动移位,实现井孔内可控、均匀取土。门吊PLC控制程序判定单点吸泥深度满足设定值后,自动执行下一点位吸泥作业,避免超吸引起的涌砂风险。
3)泥面标高自动测量。吸泥完成后,关闭空气吸泥机,将吸泥管作为测杆进行泥面标高测量。吸泥管总长已知,以吊重传感器数值变化判定吸泥管是否触及泥面,记录电动葫芦钢丝绳下放量,即可计算出泥面标高和刃脚埋深。
4)门吊集群控制,作业数据可追溯。2名操作人员在集控室内即可控制15台门吊,大大提高了沉井取土作业机械化、自动化程度。作业过程数据,如吸泥作业时长、单次吸泥完成后的泥面标高、吸泥效率等均能记录、存储。
井孔内自动化吸泥作业流程如图4所示。以砂质土层为例:单点吸泥开始后,下放吸泥管,当重量传感器检测到吸泥管触碰泥面后提升20 cm,隔一定时间再下放吸泥管10 cm,直至电动葫芦钢丝绳下放量满足设定值,即达到目标吸泥深度。不同土层吸泥管作业参数有所不同,需依据工艺试验确定。

图4 井孔内自动化取土作业流程图Fig.4 Operation flow chart of automatic soil excavation in wells
下沉取土过程中,编排合理的内、外井孔吸泥顺序,使内、外井孔泥面形成约1.5 m高差。通过内井孔吸泥保证取土量,外井孔吸泥调整沉井姿态及每日下沉量,使整个下沉过程可控。
自动化气举取土在砂质土层吸泥效率可达到30~40 m3/h,在软塑粉质黏土层为20 m3/h。作业完成后,井孔内泥面高差可控制在1 m以内。作业过程中发现,沉井每下沉5~10 m需用抓斗对井孔内遗留下的大块石进行清理,否则影响吸泥作业效率。
3.2 高压旋喷与气水复合射流破土
当沉井下沉至软塑粉质黏土层时,采用高压旋喷RJP工法对内井壁及内圈隔墙上的24个节点处的黏土层进行预搅松。通过分布在钻杆上、下段的高压喷射流体2次切削破坏土层,从而扩大射流影响区。钻头钻进时水压3.5 MPa,流量12 m3/h,穿透黏土层后停止钻进,缓慢提升钻杆并进行水平喷射破土作业。上段水平喷嘴射水压力20 MPa,流量6 m3/h;下段喷嘴射水压力40 MPa,流量18 m3/h,射水孔环向气孔喷射1 MPa压缩空气形成气幕。钻杆提升速度25 mm/min,转速2.6 r/min。作业过程中,可观察到节点相邻的4个井孔均出现明显翻涌现象,且节点处预埋的反力计读数由0.9 MPa降低到0.3 MPa(修正环境影响后的压力),可判定该节点已完全脱空。单个节点作业总耗时约9 h(含钻杆安装、拆除),其中5 m土层内旋喷作业总时长约4 h。
内井孔取土后四周隔墙处形成临空面后,采用气水复合射流工艺对土墙进行冲射破除。冲泥器端部布置有4个水平喷嘴,工艺原理与RJP工法相似,不同的是射水压力为2~2.5 MPa,流量提高至280 m3/h,与空气吸泥机的供气、供水系统共用。喷嘴周向的压缩气体助推水力喷射,使被射流冲击的土体迅速膨胀破坏。破除井孔单边10 m长井壁隔墙下的土体耗时约1 h。作业过程中,通过观察相邻井孔水面翻涌情况以及隔墙下预埋的反力计数值变化来评估破土效果。
3.3 机械臂水下取土机器人
3.3.1 总体设计
针对刃脚下取土盲区,研发了一种适用于深水多井孔沉井基础机械臂水下定点取土机器人。该设备由上部平台和水下机器人本体组成,如图5所示。上部平台包括操作室、水下机器人收放系统以及电缆绞车;水下机器人本体包括内支撑臂架、液压系统、射水泵、机械臂和铣刨头。机械臂绕中心在±190°范围内回转,臂长伸缩范围为3.5~8.0 m,工作部件铣刨头最大切削力为20 kN,刀头处设置有射水喷嘴,用于清洗刀齿,并辅助破土。
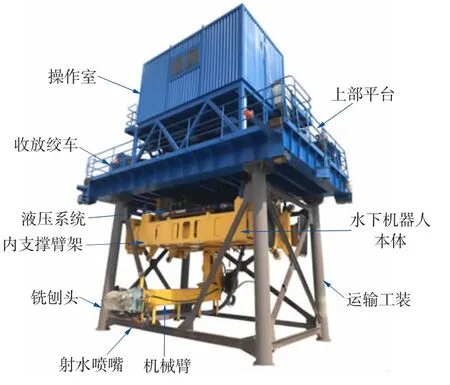
图5 水下取土机器人Fig.5 Underwater excavating robot
上部平台走行机构由变频电机驱动无轮缘轮组行走,配合水平导向轮进行限位,通过调节两侧的变频电机驱动频率,实现直线轨道和圆弧形轨道自适应行走。动力总成及控制阀组设置于水下,减少了液压系统压力损失和动作延迟。
3.3.2 刀头空间位置计算
铣刨头相对刃脚的空间位置关系实时感知是问题的关键。2台绞车上的编码器可以测量钢丝绳的放绳量,从而计算出机械臂回转中心点相对于刃脚的高度H。此外,机器人还搭载了高精度水下传感器,包括回转角度α、臂长L、伸缩臂倾斜角度β,如图6所示。传感器将数据传输到操作界面,通过数学模型即可实时解算出铣刨头与沉井刃脚的空间位置,并将其展现在操作室控制系统界面上。辅助作业人员判断刀头与沉井井壁及刃脚的相对位置关系,并通过观察铣刨头负载油压变化对土体切削过程进行监测,实现水下精准定点、可视化取土。铣刨头设有过载保护,超过一定压力能自动泄压,防止刀头及钢沉井壁体被损坏。

图6 铣刨头空间位置计算模型Fig.6 Calculation model of spatial position of the cutter head
3.3.3 施工工艺
起重船将设备吊装至沉井顶面轨道上,解除上部平台与水下机器人之间的锁紧机构,2台绞车缓慢下放水下机器人并同步下放电缆。当穿过剪力键达到设定高度时,内支撑臂架上4个油缸伸出,支撑于沉井壁,完成驻位,单个油缸压力保持在15~20 MPa。
准备工作就绪后,机械臂回转至需要铣削的点位,通过伸缩、变幅动作移动铣刨头破除刃脚处土体。作业过程中,观察铣刨头负载油压,并不断调整刀头的切削进给量,直至刀头整体越过井壁隔墙中线。当前点位作业完成后,缩回机械臂,并回转一定角度,调整臂长和倾角,直至完成单次驻位所有点位刃脚处土体破除作业后,缩回内支撑油缸,回收水下机器人,上部平台沿轨道移动至下一工位,重复上述步骤即可。单次驻位、破土作业及水下机器人回收总耗时约6 h。作业完成后,采用三维声纳扫描井孔泥面[8],并根据图像判断内井壁刃脚下的脱空情况。K1—K4井孔泥面扫描如图7所示,可见内井壁刃脚下方已完全脱空。
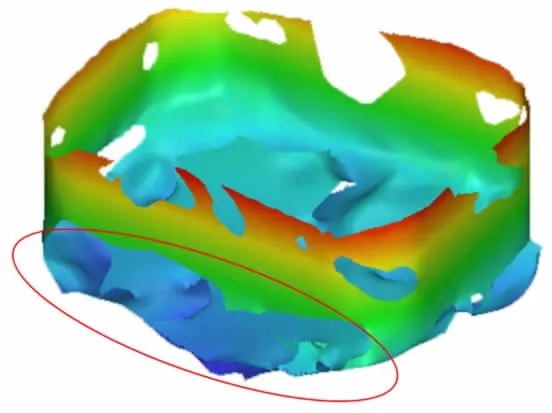
图7 井孔内三维声纳扫描Fig.7 3D sonar scanning in wells
4 结语
常泰长江大桥5号墩沉井基础结构新颖,平面尺寸大,端阻力成为沉井下沉的控制因素。依托项目研发的自动化气举取土集群控制系统、机械臂水下定点取土机器人,并引入高压旋喷与气水复合射流工艺,首次采用内、外井孔台阶式取土工艺。沉井于2020年6月10日开始取土下沉,并于2020年12月28日下沉至-65 m设计标高,日均下沉量达到45 cm,且下沉过程中倾斜姿态始终控制在1/150以内,终沉到位时横桥向、顺桥向高差分别为4 cm、1 cm,沉井中心平面偏位约10 cm。通过沉井下沉取土装备研究与现场应用,提升了沉井施工机械化、自动化水平,实现了可控、可测、可视取土下沉,保证了沉井平稳、安全、高效下沉至设计标高。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
铁道建筑(2021年12期)2022-01-08
建材发展导向(2021年9期)2021-07-16
绿色科技(2020年22期)2021-01-08
当代陕西(2020年24期)2020-02-01
当代陕西(2020年24期)2020-02-01
当代陕西(2020年24期)2020-02-01
故事大王(2016年7期)2016-09-22
儿童故事画报(2013年3期)2013-06-24
科技传播(2012年7期)2012-08-15