
声纳阵测量高速运动目标入水点关键技术研究
2022-04-29 00:44孙贵新
计算机应用文摘 2022年18期
孙贵新
关键词:落点位置测量;浮标与潜标;瞬态信号
1引言
采用浮标与潜标相结合的方式,可以完成对高速运动目标入水点位置的测量,浮标和潜标探测到的数据可以进行事后融合,同时提升落点位置测量精度和可靠性。但在工程实践中,浮标和潜标相结合的方法会面临诸多技术难题。
2瞬态信号检测与分析技术
瞬态信号在时域上具有很短的上升时间、较短的脉冲持续时间、较大的脉冲幅度。在频域上,瞬态信号具有较宽的频谱分布。在信号特征上,瞬态信号与稳态干扰背景具有比较明显的特征差别,具有明显的非平稳的特征。本系统利用瞬态信号检测完成对水下目标的被动定位。
根据信号特性,分别采用不同的信号检测方法进行分析,如能量法、短时傅里叶变换法,短时相关法、基于小波变换法、双谱法等多种方法进行了信号检测的分析和结果对比。
由于瞬态信号的声源级比较高,采用简单的能量检测法检测时延,较其他检测方法简单、易实现且运算量小,易在DSP处理器上实现,但是存在低信噪比情况下性能急剧下降的缺点,如要在计算机上实现,可尝试采用其他方法检测时延。在潜标定位时采用DSP实时处理,潜标回收后采用多种信号检测技术,可以提高目标检测精度。
3瞬态信号去噪声技术
水下瞬态信号易受海洋噪声的影响,当接收信号的信噪比较低时,会导致能量谱峰值识别存在较大偏差,从而降低定时精度,因此为了提高接收信号的信噪比,同时保证定时精度,需要对水下爆炸信号去噪声进行研究[1]。
在声学信号处理中,采用固定滤波器、维纳滤波、谱减法和小波去噪。与其他方法相比,小波去噪是一种基于小波变换的去噪方法[2]。小波变换有效克服了传统方法在时变平稳信号分析中存在的缺点,可以最大限度保留时变非平稳信号中的突变成分。系统中选择小波变换可以提高约9DB的信噪比,在信号后处理中增加小波去噪,可以提高系统信噪比以及时延检测精度。
4低功耗下水声信号检测技术
在超低功耗工作条件下,系统要求对未知频率、未知频带带宽和未知信号形式的信号进行检测。
为了降低运算量和提高检测概率,本系统的未知信号检测采用时频分析能量检测方法。频谱分析可以将接收信号能量分解到各个子频带内。假设噪声为宽带分布,时间平稳:待检测信号为有限带宽和时宽信号,当信号落到时频分析单元内时,系统实现对信号的匹配滤波,能量检测获得最大处理增益。时频域能量检测采用快速傅立叶变换算法(FFT),可有效地减少信号处理运算量,从而降低了系统功耗。
频域能量检测方法是比较成熟的技术,采用该技术可大大减少系统开发周期,并降低系统研制风险。
海洋环境噪声在系统比较宽的工作频段内幅度谱起伏会比较严重,因此将整个工作频带划分成多个子频带,同时进行动态门限估以及信号检测[3]。门限设定决定了系统检测概率和虚警概率。由于海洋环境噪声是缓慢时变的,因此需要对噪声背景进行实时估计,并动态设定门限。为了简化计算,系统采用a-p滤波器估计方法,原理是当前帧检测门限由当前帧幅度谱均值和前一帧幅度谱均值经过a-p滤波后的结果来决定。
5高精度目标方位估计技术
高精度目标方位估计技术的具体实现方法主要是:时延差估计误差、声速测量误差、基线长度误差和潜标方位姿态测量误差。其中,声速测量误差和基线长度误差是系统误差,时延差估计误差和潜标方位姿态测量误差为随机误差。由于声速测量误差比较小,而基线长度误差可通过水池校准进行修正,因此这两个误差可不考虑。潜标方位姿态测量误差是由辅助设备决定的,不在本系统考虑范围内。基于此,影响目标方位估计的主要误差源就是时延差估计误差。提高目标方位估计精度理论上有很多成熟的方法,工程实践上主要采用提高时延差的方法来估计精度。
采用广义互相关方法进行时延差估计,由于在时域直接计算互相关运算量大,因此采用计算互功率谱的方法来得到信号的互相关函数。
如此,即可将时域上的互相关函数计算转化成频域上的互功率谱计算。如果在互相关之前需要对信号进行预滤波处理,也可以转化成频域来进行,即将两通道信号的互功率谱先乘以滤波权系数,然后反傅里叶变换得到时域上的互相关函数,最后进行时延差估计。采用频域互功率谱计算进行互相关函数计算,就可以将互相关函数计算结合到信号检测过程中进行,不需要再次进行繁复地计算,即当判定检测到信号后,直接利用信号检测过程中计算的信号FFT经过简单处理,则可求得互功率谱,这就大大地减少了信号处理运算量,降低系统功耗。总结上述方法,可得到基于互功率谱的时延差道预处理滤波器的频率响应。
6宽频大动态高倍频采样信号采集技术
测试目标是瞬态冲击信号,距离落点较近的节点接收信号较强,距离落点较远节点接收信号较弱。由于落点位置未知,系统必须具备宽频带大动态信号采集能力。
要实现大动态宽带信号采集,对光源调制带宽、高倍率光学采样、运算速度、运算量、系统动态范围等都提出了极高的要求。在光學调制技术上,干涉型光纤探测需采用光学调制将低频声压信号调制到高频相位载波上,当声压信号带宽增加时,为避免频谱混叠,需要光学调制频率也随之增加。经过优化设计,目前已实现5-2000赫兹宽频带无失真解调。在信号处理中,通过增加单周期内的采样点数,尽可能保留更精细的波形数据和更丰富的频域信息。本项目采用声压频带上限的16倍频光学采样,通过提高采样光脉冲的重复频率,使得从光纤水听器基元中返回的光脉冲携带更全面的声压信息。在计算能力上,根据落点检测系统对声阵段大量基元返回的高采样率信号进行同步实时解算的要求,信号处理系统数据总传输速率、运算速度和运算量都需提升至新的水平。项目主要解决多核并行大容量计算管理与资源调度,数据高速缓存与传输、板卡间高精度同步和数据互联等关键技术问题,同时对运算逻辑和算法进行优化,实现从高采样率光脉冲信号中恢复出高保真原始声场信息的目标。在动态范围上,通过光纤相干探测技术将声压强度大小转化到光场的相位上,并引入光场调制技术,从而将探测幅度跨度巨大的强度信号转化到频域上,而探测系统测到的光场强度保持不变。由于在光频域可产生高的调制频率,光学系统频带宽度远高于强度探测中光电转换及模数转换的动态范围。通过以上措施,可以保证系统具备130dB以上的动态范围。
项目组针对高源级信号进行了海上测试,采用动态范围约llOdB的光纤水听器阵列系统进行测试时,由于信号强度达到了超过系统接收最大范围,采集到的信号出现了过载问题。
通过增加前端采样率与优化系统光学结构等措施,光纤水听器系统的动态范围大于130dB,优化后的光纤水听器阵列可以接收到更大强度的信号而不会出现过载。
7水听器三维阵形监测技术
无人船拖带光线水听器阵列机动机时,在配重块与拖曳力的共同作用下,垂直线阵整体阵形为三维抛物线阵形。为此,阵列中需要安装三维姿态传感器,实现线阵高阶弯曲模态的三维测量,为阵形校正算法提供输入数据。采用姿态传感器对阵形进行较正,可以显著提高阵列处理增益及测向精度。
当拖线阵直径减少到30mm以下时,如果阵形监测传感器的尺寸不变,将会导致传感器安装部位尺寸大于线阵直径,从而增加线列阵拖曳流噪声,降低拖线阵探测性能。与此同时,安装传感器位置的凸起在绞车上卷绕工作时极易损伤水听器阵列,降低系统可靠性。
为了提高监测的实时性,需要提高传感器数据采样频率;为了安装在细线阵中,需要减小传感器尺寸;为了提高阵形校正的精度,需要提升传感器精度及数量:为了实现立体监测,需要实现阵形的三维姿态及工作深度测量。研制小型化、高采样、高精度、多维度阵形监测传感器是本项目的关键技术。
针对36mm直径拖线阵,采用三维电子罗盘已实现阵形航向角、俯仰角与横滚角的高精度测量。针对26mm直径拖线阵,项目组将对阵形监测传感器的结构进行优化设计,集成光传功能、缩小尺寸、改进安装结构,确保传感器可以安装在阵列中,并保证数据的可靠传输。阵形监测传感器核心部件由三维姿态测量板、深度测量板、压力感应头与光电转换板等几部分组成,电路板整体进行封装,并安装到拖线阵中。为了缩减传感器尺寸,需要将三维姿态测量板、深度测量板及光电转换板进行布局优化.以减小板面尺寸。
传感器集成度增加,结构尺寸变小后,还需要对其标定方法进行优化改进。三维电子罗盘中存在零偏误差、灵敏度误差、非正交误差、对齐误差、软磁效应、硬磁效应等误差因素。这些误差都会使传感器的输出偏离真实值,进而对当前姿态的解算造成较大影响。为了让解算的姿态更加准确,必须对这些误差因素进行精确标定和补偿。
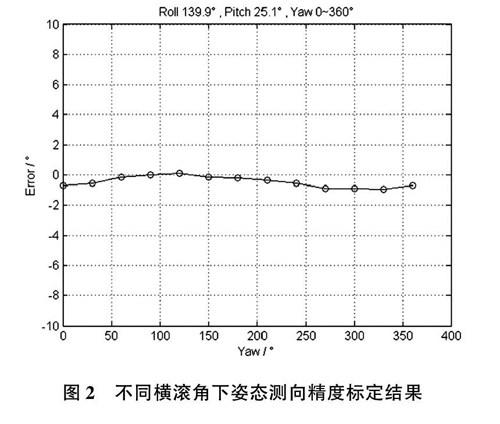
考虑到三维电子罗盘内部非正交误差、对齐误差、软磁效应、硬磁效应之间的相互关系,从整体上将它们都当成一种内部芯片与外壳体的安装误差,项目组提出了一种先通过绕外壳轴旋转标定安装誤差,再标定灵敏度和零偏误差的方法,实现了三维电子罗盘整体误差的精确标定与校正,且校正后的传感器在不同的横滚与斜角范围内都能够保证高精度工作,不同横滚角下姿态精度测试数据图2所示。
8结束语
本文针对实践中应用浮标和潜标相结合的方法解决高速运动目标入水点测量时会面临诸多技术难题,如弹头击水声脉冲瞬态信号检测与分析技术、瞬态信号去噪声技术、低功耗下水声信号检测技术、高精度目标方位估计技术、宽频大动态高倍频采样信号采集技术、水听器三维阵形监测技术等,提出解决方案,并经实践验证及应用,证明了研究结果的正确性。
