
多模态网络下多智能体协同控制的通信拓扑重构方法
2022-04-29 05:15张汝云肖戈扬单麒赫邹涛李丹滕菲
通信学报 2022年4期
张汝云,肖戈扬,单麒赫,邹涛,李丹,滕菲
(1.之江实验室智能网络研究院,浙江 杭州 311121;2.大连海事大学航海学院,辽宁 大连 116026;3.信息工程大学信息技术研究所,河南 郑州 450002;4.大连海事大学船舶电气工程学院,辽宁 大连 116026)
0 引言
多智能体系统(MAS,multi-agent system)协同控制的研究在现阶段科学发展中的应用十分广泛。例如编队控制、避碰避障控制、通信组网设计等。随着云计算、人工智能、通信网络等领域的发展,MAS 协同控制与这些新兴领域技术相互融合,已取得一些成果[1]。然而,MAS 协同控制方法仍然存在许多问题,比如不确定性、通信拓扑、多一致性等。
目前,MAS 协同控制的研究仅对单边主义通信网络下的单个MAS 的协同控制进行研究和设计。然而,由于多智能体实际工况下所处环境不断变化且其所面临任务也越来越复杂,导致仅单个MAS协作常常无法胜任。因此,在面对更大规模复杂任务时,需要多个不同功能的MAS(MMAS,mutiple-functional multi-agent system)实现多边化的分布式协同控制来应对和完成任务。MMAS 多边化分布式协同控制的含义是通过构建一个合理的通信拓扑结构,设计一个合适的分布式控制协议,使面向任务重新分组后各组内所有智能体最终趋于一致,进而实现多个具有不同功能的多智能体系统的协同控制。然而,在MMAS 多边化分布式协同控制过程中,会存在以下问题。
1) MAS 协同控制一般要借助于通信网络拓扑结构来实现,单个智能体通过与其邻居之间进行信息交互来实现协作,现阶段研究仅限于单边主义通信网络下单个MAS 实现协同控制。在面对大规模复杂任务和时变工况时,处在单边主义通信网络下的MAS 之间不能进行信息交互,无法实现MMAS多边化分布式协同控制,导致无法完成最终任务。
2) 即使MAS 之间可以实现信息交互,但简单地将MMAS 组网也不能保证实现多边化分布式协同控制。MAS 通信拓扑结构需要满足一定条件才能保证分布式协同控制的实现,面向复杂多样化任务需要对MMAS 内各个MAS 进行分析和重组,设计一种合理的通信拓扑结构。
为了解决上述问题,本文针对多模态网络下MMAS 提出一种通信拓扑重构方法,为实现多边化分布式协同控制奠定基础,以应对大规模复杂任务。对此,本文有以下贡献。
1) 随着新型网络环境的发展,基于多模态网络[2]构建MMAS 多边化分布式协同控制框架,以实现开放网络环境下MMAS 协同控制,突破单个MAS协作无法完成日渐复杂和多样化任务的局限性。
2) 基于外部公平划分(EEP,external equitable partition)算法对MMAS 中多个MAS 进行分组,提出MMAS 通信拓扑重构方法,使在同一组内各个MAS 趋于一致,整个MMAS 达到多一致性,进而实现多边化分布式协同控制。
1 相关工作
本文主要研究多模态网络下MMAS 多边化分布式协同控制问题,下面,分别从多智能体协同控制和多模态网络两方面进行相关工作阐述。
1.1 多智能体协同控制
智能体是一种拥有独立思考并在环境中自主调节的实体,是使人工智能技术实现的一种载体[3]。但是,随着任务越来越复杂,单个智能体的处理能力有限,所以MAS 引起了相关领域研究者的关注。协同控制是MAS 领域的关键研究问题,其在编队控制、集群控制等领域中都有广泛的应用,并有很多的研究成果。Borkar 等[4]提出多个智能体基于通信协议进行信息交换,来达到协同控制,从而完成预期的复杂任务。Degroot[5]在控制领域中首次结合一致性的思想,提出了加权平均一致性算法,并且考虑了传感器接收不确定性信息的问题。Viscek 等[6]建立了一种离散时间模型,每个粒子通过通信协议得到邻居粒子的状态信息,来改变自身运动状态,从而使粒子群在有限时间内速度收敛,并实现一致性。Jadbabaie 等[7]基于Viscek 模型,通过使用代数图论,首次对一致性问题进行理论性的研究,证明了MAS 中所有智能体最终收敛趋于一致。Moreau[8]基于凸理论、系统理论、图论等知识研究了有向网络下MAS 的一致性问题,并提出了智能体之间通信次数过多会影响系统的收敛速度。Olfati-saber 等[9]证明了MAS 的通信网络拓扑连通度与其收敛速度有关。Ren 等[10]基于代数图论进一步探讨了连续时间下的一致性,证明了系统收敛到一致状态的充要条件。然而,当通信网络不连通或面对多种复杂任务时,MAS 无法达到一致性,因此需要对MAS 进行通信拓扑结构设计。Olfati-saber 等[11]和Gambuzza 等[12]研究了MAS 网络的多一致性控制问题,对一个具有单元间交互的基本有向图和期望的多一致性MAS,基于EEP 来对MAS 进行通信拓扑重构,通过分布式控制来驱使MAS 朝着目标状态发展,为实现MAS 的多一致性提供了理论依据和解决方法。通信拓扑的连通性是研究MAS 协同控制的理论前提[13],对此Wang 等[14]和Liu 等[15]基于代数图论和Warshall 算法针对复杂网络提出了一种连通性判断的算法。
随着时间的推移,MAS 内的所有个体的状态最终均趋近于同一个状态值,被称为一致性。一致性问题是MAS 协同控制的基础问题,但利用一致性完成多目标任务时存在一定的局限性,系统在同一时间内无法完成多个任务。而且在MAS 的实际应用中,外部环境复杂多变,协作任务随机分配,甚至时间的变化都有可能导致网络中的智能体收敛到多个一致性的现象出现,这种状态被称为多一致性[16]。
1.2 多模态网络
“构建多模态网络环境”发展理念是由邬江兴院士在2021 年首次提出的[17],其基本思想是在面对逐渐复杂的网络环境时,通过设计一种基于全维可定义平台的开放式网络架构,来解决多元化网络中出现的一系列问题。Li 等[18]提出独立于IP 的新型网络体系,即一种实现共治共管共享的后IP 时代的环境,达到了多边共管、平等开放、性能高效、去中心化等目标。在国家973 计划“可重构信息通信基础网络体系研究”的项目支持下,兰巨龙等[19]提出了“可重构网络”的思想。基于上述认识,李挥等[2]继续提出一种开放的网络架构,突破了现有网络技术对网络拓扑、通信、连接的技术难题,来满足基于多边主义下网络多元化发展的需求。这些研究的出现,意味着当前网络环境有着革命性创新的发展趋势[20]。
MAS 作为人工智能领域中热门的研究方向,智能体之间通过分布式协同控制达成多一致性,以解决复杂的问题。近些年,随着互联网智能化和数字化发展的不断升级,为了使工业网络、家庭网络、无人驾驶和智慧城市建设能更好地适应新型的网络环境,上述MAS 网络的结构需要升级重构,并要符合多模态智慧网络技术的发展需求——多元化、高性能、个性化、智能化[21]。MAS 在解决这些问题上有一定优势[22],主要体现在以下几点。
首先,MAS 具有独立性与自主性。智能体在执行任务时,可以自主地选择相应的策略来解决问题,最终使系统达到一致性。在设计MAS 时,对智能体进行分层分组式管理,对同一任务配置多个智能体,从而降低单个智能体完成任务的复杂程度。在对大型系统或网络进行控制和管理时,通过拓扑设计,可对MAS 多模块化处理,有效降低控制算法的复杂度。
其次,MAS 具有协作性。在MAS 中,各个智能体互相通信与协商,调整各自的行为,高效地完成复杂任务。面对规模较大、数量较多的任务时,可以将系统划分成不同单元,单元之间相互协作,通过约束性算法完成这些复杂任务并达到多一致性。
最后,MAS 具有分布性和异构性。每个智能体可以看作机器人、计算机、无人车等由不同的编程语言和开发理念设计出来的实体。
上述优势仅仅局限于单边网络环境,即一个MAS 就可胜任的复杂任务。但随着多边化网络体系的发展,在面对更大规模的复杂任务时,其周围环境也会随着时间改变,未知的扰动和影响会限制甚至阻碍单个MAS 的控制。为了突破单边MAS 控制的局限性,结合多模态网络环境下多边共治的设计理念,基于上述认知,本文针对多模态网络下MMAS 提出一种通信拓扑重构方法,为实现多边化分布式协同控制奠定基础,以应对大规模复杂任务,所以未来的多智能体协同控制将会依赖于多模态网络。
2 MMAS 多边化分布式协同控制框架
MMAS 多边化分布式协同控制是基于多模态网络环境通过MAS 间交互信息来实现的,其框架如图1 所示,具有分布式、多边共管、即插即用、平等开放、结构可扩展等特点,可以实现复杂任务的快速响应、高效处理,来更好地服务和推动新型网络技术的发展与升级。
图1 中,MISSION 1 为系统当前所执行的任务,MISSION 2 为系统结束当前任务后所执行的下一个任务。由图1 可知,MMAS 由多个具有不同功能的MAS 组成,分别是无人水面艇(USV,unmanned surface vessel)、无人机(UAV,unmanned aerial vehicle)和自主式水下潜器(AUV,autonomous underwater vehicle)。在面向复杂任务时,MMAS不再由单个MAS 完成,而是由上述多个MAS 通过多边化分布式协同控制来实现的。

图1 MMAS 多边化分布式协同控制框架
MMAS 中的每个MAS 都是任务的执行者和参与者,并存在于同一网络层次中。针对不同任务需求,要求多个具有不同功能的MAS 进行组队来执行。若遇到工况时变,参与任务的MAS 数量不够,空闲适合的邻居MAS 就可以随时加入任务中。
MMAS多边化分布式协同控制框架由2个层级组成,分别为任务发送方和任务执行方。任务发送方是动态的主体,在图1 中,任务发送方解析和评估第三方提交任务的风险和难度等级,合理分配任务,并且将任务发送给其他任务发送方,在完成任务分配后,此任务发送方恢复为与其他任务发送方相同级别的通信水平,来向不同任务执行方发送任务;任务执行方,即图1 中3 种不同的MAS(USV、UAV 和AUV),其可根据自身情况,通过信息交互选择接受或拒绝附近任务发送方所分配的任务,在接受任务后,可与其他的MAS 建立合适的通信网络组成MMAS,实现多边化分布式协同控制。具体操作步骤如下。
步骤1任务受理。根据就近原则,距离第三方最近的任务发送方接受任务并临时成为任务解析方,对任务的风险及难度进行解析评估,并对其周围处于不同单边主义网络环境下的任务发送方分配具体任务需求。
步骤2任务发送。任务解析方与其他的任务发送方进行信息交互并通过网络部署任务,在任务分配结束后,任务解析方恢复成与其他任务发送方同级别的通信水平,每个任务发送方均可与附近的一个或多个MAS 通信。
步骤3任务接受。各个任务执行方,即合适的MAS接受任务(如图1中的USV、UAV和AUV),通过通信网络与其他接受任务的MAS 建立临时通信,组成一个结构简单的MMAS。
步骤4任务执行。临时组建的MMAS 需要满足一定的通信拓扑结构条件,当不满足条件时,通过对MMAS 的通信拓扑结构进行拓扑设计,使重构后的MMAS 达到要求,进而实现多边化分布式协同控制,协作完成任务。
步骤5任务完成。在完成一次任务后,MMAS自行解散,并等待下一个任务的分配,再重新组队。
上述提出的MMAS 多边化分布式协同控制架构的设计在多模态网络环境下秉承着去中心化、即插即用、多边共管的理念,实现了多个单边主义网络环境下MAS 面向任务的动态组队,通过多个MAS 的协作可以更加灵活地满足复杂多样的任务需求。
3 MMAS 通信拓扑重构方法
MAS 实现协同控制需要依赖通信网络,当通信网络是多模态网络下的通信网络时,才能构建新的多智能体团队(即本文提到的MMAS)。这种情况下MMAS 可以实现多边化分布式协同控制,所以多模态网络下的通信拓扑重构是实现多边化多智能体分布式协同控制的基础。
多模态网络下的MMAS 在面向任务时需要通信拓扑重构,本节提出一种通信拓扑重构方法来对其进行研究。
3.1 代数图论和MAS 模型
MAS 网络是一种基于底层网络通信的复杂系统,用图论中的G=(V,E,A) 来表示系统的网络结构,一种具有n个节点(或顶点)和e条边(或链接)的图,其中,V={w1,w2,…,wn}是一个有限的非空节点集;E⊆V×V是G中节点所构成的边集,简称为边。边表示节点之间的邻居关系,对于2 个节点wi,w j∈V,其中i≠j,有(wi,wj)∈E,称wi和wj可以进行通信;用表示邻接矩阵,若(wi,wj)∈E,则wij=1,若(wi,wj)∉E,则wij=0,其中i≠j;用D=diag{d1,d2,…,dn}表示度矩阵,其中。
对于无向图,L=LT且L可对角化。在这种情况下,拉普拉斯矩阵是半正定的,所有特征值为零或正,如果拉普拉斯矩阵有一个零特征值对应的特征向量为1,则图是连通的。在有向情况下,拉普拉斯矩阵不一定是对称的,但所有特征值都有半正实部。
定义1如果一个有向图的无向型是连通的,也就是说,如果它的无向型在每对节点之间总是存在一条路径,并且没有不可到达的节点,则称它为弱连通。
定义2如果一个有向图的每对节点之间总是存在一条有向路径,并且没有不可到达的节点,则称该有向图为强连通图,且rank(L)=n-1。
本文主要的研究对象是线性一阶积分控制的多智能体系统,多智能体系统的状态满足如下动态方程

其中,xi(t)∈Rn为智能体的状态,u i(t)∈Rp为系统的控制输入,A、B为合适维度的常数矩阵。
通过式(1)中的动态方程,考虑其离散的一致性控制方程为
其中,L为MAS 的拉普拉斯算子。
3.2 MMAS 连通性判定
在对MMAS 设计时,需要对系统通信网络的连通性进行分析。当系统通信网络连通时,可以对其进行控制;当系统通信网络不连通时,需要对其进行通信拓扑重构。
关于连通性的研究对设计多边环境下的MMAS 网络十分关键。在设计一个MMAS 网络时既要符合节能节约的理念,也要避免网络连通性被破坏。对此,本文通过对MMAS 网络的邻接矩阵的结构进行分析,基于可达矩阵算法[23]、Warshell算法[15]以及Wang 等[14]算法,来判断邻接矩阵的连通性,并设计特殊的随机矩阵来模拟MAS 网络,得出连通性和矩阵结构之间的关系,从而达到优化设计的目标。
定义3设G=(V,E,A)为n阶有向图,定义矩阵P=(pij)n×n,有

则称矩阵P是有向图G的可达矩阵。
上述方法对于复杂的有向图,即当G的阶数较大时,无法直接判断。对此,通过邻接矩阵A,也可以计算可达矩阵P。先计算B=A+A2+…+An,再通过
来构造可达矩阵P。
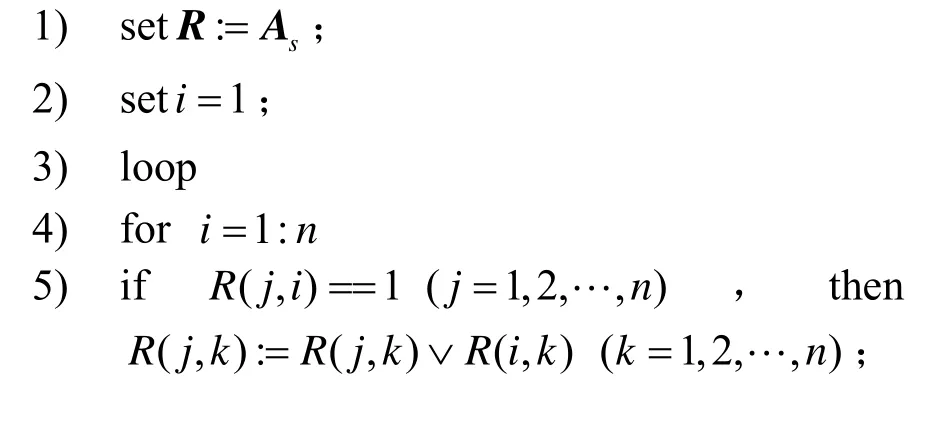
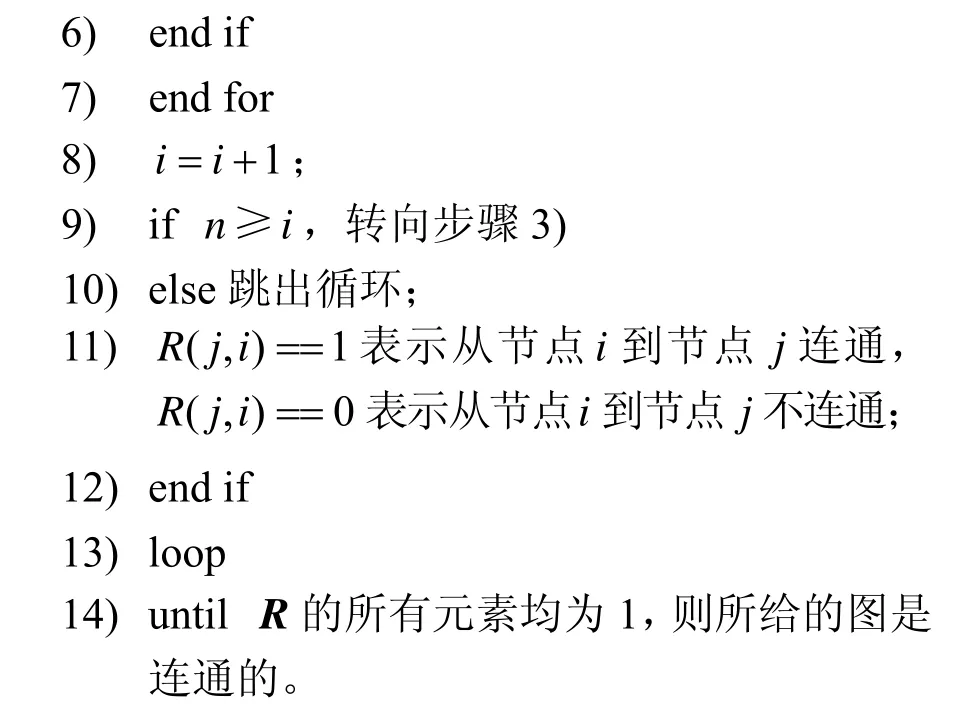
对A中的每个节点i,找出通过有向边到达节点i的所有节点j,其中i≠j,再将这些节点j所在行和节点i所在的行逻辑相加,作为这些节点j的新行,称为Warshell 算法,该算法的连通性判定如算法1 所示。
算法1基于Warshell 算法的连通性判定
定义随机邻接矩阵As,对As中的每个节点i,找出通过有向边到达节点i的所有节点j,其中i≠j,再将这些节点j所在行和节点i所在的行逻辑相加,作为这些节点j的新行。
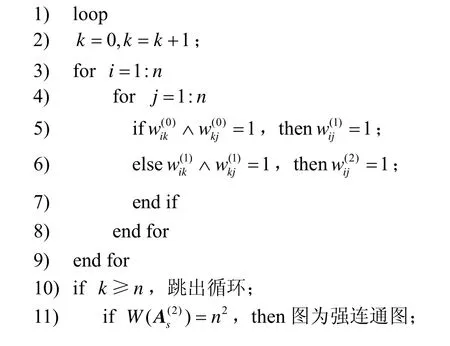
Warshell 算法和可达矩阵算法都是面向网络的直接搜索算法。Warshell 算法的优点是结构简单并运用了高效的位运算方法,但其复杂度高于O(2n3),其中n是网络中节点数,只限于判断简单网络图的连通性。可达矩阵算法的复杂度高于O(n4),在大规模的实际网络中很少使用。通过对比Warshell 算法和可达矩阵算法的优缺点,本文基于Wang 等算法提出了一种针对复杂网络连通性高效的判断算法,来对通信网络拓扑进行判断,通过判断和排序以及n次加法运算,其复杂度为O(n3+4.5n2)。相对于可达矩阵算法和Warshell 算法,Wang 等算法复杂度更小、应用范围更广。基于复杂网络连通性高效的判断算法,本节设计了一种求随机矩阵最优连通率的算法,如算法2 所示。
算法2多边化网络最小链路设计连通性判定算法
定义n阶随机邻接矩阵As,记邻接矩阵As中元素为,W(As)为非零值的个数,设As中的每个智能体i与其他智能体j直接连接的概率为α(i≠j;i=1,2,…,n;0<α<1)。

通过实验数据,找出临界的连接概率αc,当α≥αc时,连通率γ=1,As是连通的。则对于每个n阶随机矩阵As,当As中每个节点与其他节点的连接概率为αc,即α=αc时,此n阶矩阵As是连通的。从实验数据中可得,每个n阶矩阵对应的临界连接概率为αc。
通过上述实验结果对矩阵的阶数n和临界的连接概率αc进行数据拟合,得出矩阵的阶数n和连接概率αc的拟合函数为。
在MAS 通信网路中,节点之间通信连接的密度影响着网络的连通性,节点通信连接的密度降低会使网络失去连通性;通信连接的密度过大虽然会提高连通性,但网络通信会发生阻塞,节点通信负担增大,节点的能量消耗也增加,浪费了有效资源,不符合多模态网络环境中高效能的理念。通过对矩阵阶数n和临界概率αc进行研究,得出每个节点最优的连接邻居的数量。
然而在多模态网络环境下,MMAS 的任务要求各个MAS 自愿参与,若单个MAS 决定拒绝与其他MAS 合作,并且其状态保持不变,即使其余MAS达到了一致性,整个任务也无法执行;处在一个单元中的多个MAS 拒绝与其他MAS 合作,并且删除这个单元的MAS 通信连接,可能会导致网络连通性被破坏。在一个连接断开的网络中,所有MAS不可能达成一致性,因此MMAS 连通性的设计是研究多一致性的基础。本文在MMAS 保持连通性的基础上,通过对MMAS 的结构进行拓扑设计,让MMAS 达到多一致性,从而满足不同功能的设备之间通过分组作业完成预期的任务。
3.3 基于外部公平划分的MMAS 通信拓扑重构
当MMAS 的通信网络结构不符合设计要求时,需要对MMAS 内拥有相同结构和算法的MAS 进行分组、归类。通过使用外部公平划分的方法对MMAS 的通信网络进行拓扑重构,来实现重新分组后处于同组内的MAS 达成一致性,从而使整个MMAS 达到多一致性控制要求。
研究网络动态系统的一个重要问题是从网络拓扑中推断某些网络特性,无论是在分析还是在控制方面,网络拓扑通常由底层网络有向图表示,这一问题在集群同步的背景下得到了广泛的研究。研究发现图划分的概念也是研究多智能体系统一致性的最短收敛时间、可控性和可观测性的基础。
图划分的一个典型例子是公平划分,它将入度数量恒定的节点分组到单元中。EEP 的概念也被定义为几乎公平划分或宽松公平划分。
给定一个有向图G和其顶点集V(G),每一个划分π都是一个顶点的映射,它将V划分成m个不同的单元,即q1,q2,…,qm,有,其中i≠j。
定义4如果划分π={q1,q2,…,qm}中任意2 个单元ql与qk,包括l=k,存在一个常数dlk,使每个在ql里的节点在qk中都有dlk个邻居,则称划分π={q1,q2,…,qm}是公平的。
因此,公平划分的概念要求一个单元内的节点相对于任何其他单元具有相同的出度数。
定义5给定一个图G和顶点集V(G)的划分π={q1,q2,…,qm},如果对于任意一对单元ql与qk,其中l≠k,单元ql中每一个节点在qk中都有dlk个的邻居,则称π是EEP。
在EEP 中,由于划分产生的图是否规则并不重要,因此一个单元中的节点不一定具有相同数量的邻居。虽然公平划分的单元对每个单元都有相同的出度数,但在EEP 中,这只适用于不同单元之间的连接数。
定义6商图。给定一个EEP,关联商图有若干个节点,节点数量等于分区的大小(每个节点对应一个分区的单元格),有向边权重由分区单元格之间的出度给出,如图2 所示。

图2 无向图和商图
将给定的n图G划分成m个单元,每个单元都可以用特征矩阵P∈Rn×m表示

通过特征矩阵P,令N=PTP,其中N∈Rm×m,N的对角线上的元素为每一个单元|ql|的大小。因为PTP的对角线上的元素不为零,所以PTP是可逆的。
文献[21]中还提出图的拉普拉斯算子L和商图的拉普拉斯算子Lπ满足关系式

并且得到

将式(5)代入式(4)可得

将式(6)两边同乘(PTP)-1PT,可得

定义相关特征矩阵为PH=P(PTP)-1PT,代入式(7)中,可得

通过有向图的衍生定义,本节对图拓扑进行进一步的说明。给定一个和图G相关联的拉普拉斯算子L,存在从节点wj到达节点wi的有向路径,则对于节点wj,它的可达集R(wj)可定义为包含节点wj和所有wj通过有向路径到达的节点wi。
设R1,R2,…,Rt表示图G的可达集,定义Ri的排它部分集合H i=Ri∪j≠iRj,其中H i∩Hj=∅;定义Ri的公共部分集合Ci=RiHi。
给出一个多智能体系统模型

其中,[x1(t),x2(t),…,xn(t)]T≡x(t)∈Rn,L表示MAS 连通的有向图拉普拉斯算子,u表示分布式比例控制器。

式(10)被广泛应用于多智能体问题,如聚类、集群和每个节点涉及标量变量的分布式估计[22]。
通过图的划分π={q1,q2,…,qm},定义多一致性条件为

多智能体系统的划分π的一致性轨迹渐进稳定流定义为

通过对MAS 的控制器u的拉普拉斯算子进行设计可得

其中,Lπ=L+Lu。对Lπ的节点坐标按=Tx进行一定的置换,将排它集和公共集分开,并用下三角的样式表示为
其中,Li是与Hi相关联的hi×hi(hi:=|Hi|)拉普拉斯矩阵;矩阵;M是与所有公共部分的并集相关联的δ阶方阵,其对角线上的元素表示公共部分与排它部分的连接数量。
以上方法通过对MMAS 的控制器u进行设计,使其对原系统的结构图进行改变,并得出预期的拓扑结构图Lπ;再对Lπ进行转置,得出转置后的矩阵,能更加清晰地反映出分组后的信息以及拓扑结构的改变对MMAS 多一致性的影响。
4 实例分析
在多边共管的网络环境下,本文针对第2 节的步骤4,设计了一种海面协同搜救任务,如图3 所示,其中,●、▲、■分别代表USV、UAV、AUV。因为3 个MAS 拥有不同的系统结构和一致性算法,在由3 个USV、3 个UAV 和2 个AUV 构成MMAS时,要对其通信网络结构进行拓扑,将结构算法相同的MAS 分到一个单元中,以实现多一致性控制。将MMAS 通过代数图论表示成一个交互的结构图,通过EEP 对系统进行拓扑设计,使每个MAS 达到预期的一致性。
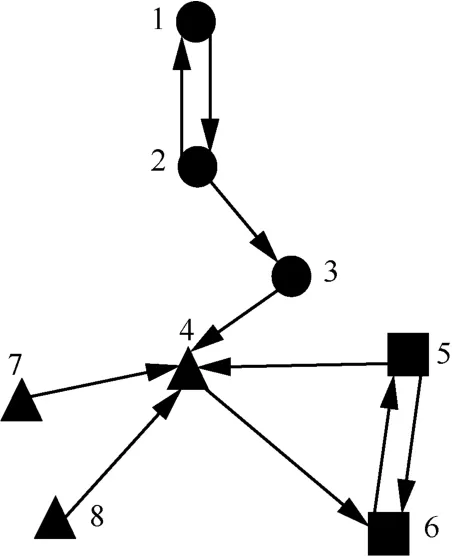
图3 MMAS 结构
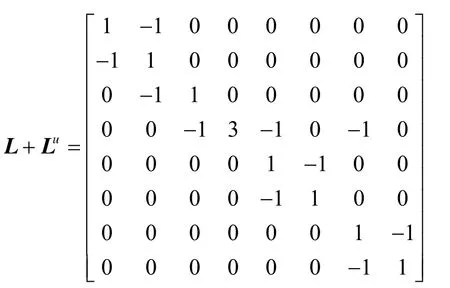
MMAS 结构图的拉普拉斯算子为

设置系统的初始状态x0=[1;3;6;0.5;2;9;5;7.5],并设置时间t∈[1,10],代入式(3)中动力学方程(t)=-Lx(t),得到系统未进行划分的时间演化图,如图4 所示。

图4 系统未进行划分的时间演化图
从图4 可以看到,8 个MAS 无法在规定的时间内达成预期的多一致性,为了实现第5、6 个MAS达到相同的一致性,且第7、8 个MAS 达到相同的一致性,本文对MMAS 进行拓扑设计。
对MMAS 的结构进行如下划分,添加链(7,8)、(8,7),删除链(8,4)、(4,6),得到以下4 个单元,即q1={1,2,3}、q2={5,6}、q3={7,8}、q4={4},并得到分组π={q1,q2,q3,q4},以及拓扑设计后的结构(如图5 所示)和对应的拉普拉斯算子。

图5 拓扑设计后的结构
通过式(9)设计控制器u,并通过特征矩阵P得到相关特征矩阵PH,将控制器u代入式(13)中,得出的结果满足式(8),则划分π={q1,q2,q3,q4}是原图的EEP,给出转换矩阵T=[e1,e2,e3,e5,e6,e7,e8,e4],得到分块的拉普拉斯算子为
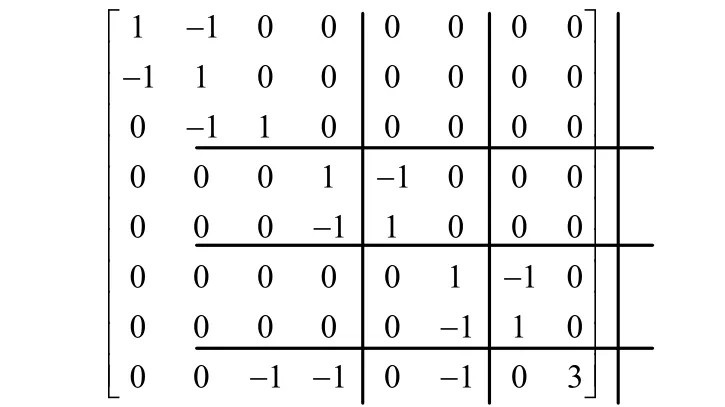
其中,排它集合为H={H1,H2,H3}={{1,2,3},{5,6},{7,8}},公共集合为C≡{4}。
将初始状态x0=[1;3;6;0.5;2;9;5;7.5]、时间t∈[1,10],以及L+Lu代入式(3)中动力学方程(t)=-Lx(t),得到经过划分后的时间演化图,如图6 所示。

图6 系统经过划分后的时间演化图
由图6 得知,在对系统的结构进行划分后,实现了第1、2、3 个MAS 达到相同的一致性,第5、6 个MAS 达到相同的一致性,第7、8 个MAS 达到相同的一致性。
以上分析表明,MMAS 内通过添加或删减链路达到了预期的多一致性,不同的MAS 也分别形成预期的分组。
5 结束语
在多模态网络环境下,智能化和数字化发展使工业生产的效率日渐提升。考虑新型网络中大规模复杂任务,本文构建了具有多边共管、即插即用、平等开放、结构可扩展等特点的多边化分布式协同控制框架,提出了适用于多个具有不同功能的多智能体系统组网后的通信拓扑重构方法。基于所设计的分布式控制协议实现多一致性,利用仿真算例验证了所提方法的有效性,为我国实现“通信技术强国”提供了技术支持和理论依据。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
风景园林(2022年7期)2022-07-15
湖南电力(2022年3期)2022-07-07
教学考试(高考物理)(2021年5期)2021-11-08
历史教学问题(2021年4期)2021-11-05
中医眼耳鼻喉杂志(2021年1期)2021-07-22
科学技术创新(2020年33期)2020-11-27
中国农村水利水电(2020年8期)2020-08-22
制导与引信(2017年3期)2017-11-02
燕山大学学报(2015年4期)2015-12-25
