
一种微小型等边三元阵的超短基线定位方法
2022-04-27 07:32:54刘德铸郭晓明孙连昊安思宇
电声技术 2022年2期
刘德铸,郭晓明,朱 琳,孙连昊,安思宇
(中国电子科技集团公司第三研究所,北京 100015)
0 引言
超短基线(Ultra-Short Baseline,USBL)定位系统依据从目标到达各水听器的声波的时延差或相位差来计算目标的俯仰角和方位角;通过测量目标声波的传播时间,来计算目标的斜距,从而确定目标的位置[1-2]。目前,USBL 定位系统为了提高对远距离目标的定位精度,一般会采用大于发射信号半波长的直角三角阵、八元正交阵或四元正交阵[2-4],并采用解相位模糊的各种方法[5-6]对目标进行定位。这就意味着,在保证远距离目标定位精度的条件下,会在一定程度上增加基阵尺寸。
针对小型无人潜航器(Unmanned Underwater Vehicle,UUV)、潜水员等载体对目标的浅水探测与近距离定位实际需求,本文提出一种微小型等边三元阵USBL 定位方法。通过在目标上安装发射声信标、在载体上安装接收定位系统的方式,实现USBL 定位。相比于以上所述基阵,本接收定位基阵的自身尺寸更小、不需要解相位模糊;减少了冗余阵元,易于小型UUV 安装或潜水员佩戴;同时,基阵的制作难度和成本均有所降低。此外,本文采用相干脉冲串信号,并利用复互相关算法来进行目标测向,仿真结果说明了该方法在一定距离上的定位性能。通过完成一套基于数字信号处理器(Digital Signal Process,DSP)的微小型USBL 定位系统,为微小型等边三元阵水下目标定位的工程应用奠定了基础。
1 等边三元阵定位原理
USBL 等边三元阵型与定位原理如图1 所示。USBL 基阵的三个阵元排列成等边三角形,阵元间距为d。为保证相位测量不模糊,取d≤λ/2,λ为波长。该USBL 基阵为微小型的原因主要考虑λ在厘米量级。

图1 等边三元阵型与超短基线定位原理
在以阵元1 为原点O的右手直角坐标系中,假设目标位于S0处,R1,R2,R3为目标到基阵各阵元的距离,S0'为S0在XOY平面上的投影,h为目标与投影间的距离,r1,r2,r3为投影到基阵中心的距离。由此得到:

图1 中,OS0'与X轴的夹角θ1为目标方位角,OS0'与OS0的夹角φ1为目标俯仰角。进一步得到:

由式(1)到(5)可得到:
记阵元1 和阵元2 所接收声波的时间差为Δt12,阵元1 和阵元3 所接收声波的时间差为Δt13,声波声速为c。当目标位置相对原点O满足远场条件,考虑到:
进一步考虑式(14)到式(16)的关系:
将式(13)除以式(12),可得到:
记阵元1 和阵元2 所接收声波的相位差为φ12,阵元1 和阵元3 所接收声波的相位差为φ13。相位差与时间差的关系为:

因此,已知φ12和φ13,就可以得到θ1和φ1;通过目标信号检测得到信号到达时刻t,从而计算出目标距离R=ct,最终确定目标相对原点O的位置。
2 复互相关测向算法
如果超短基线定位系统某一阵元的声波观测相干信号X(t)可以由m个不同时刻点t1,t2,…,tm的测量段x(t)组成,则N点采样形式为:

利用X(t)估计待测信号的相位信息,相干脉冲串情况如图2 所示。
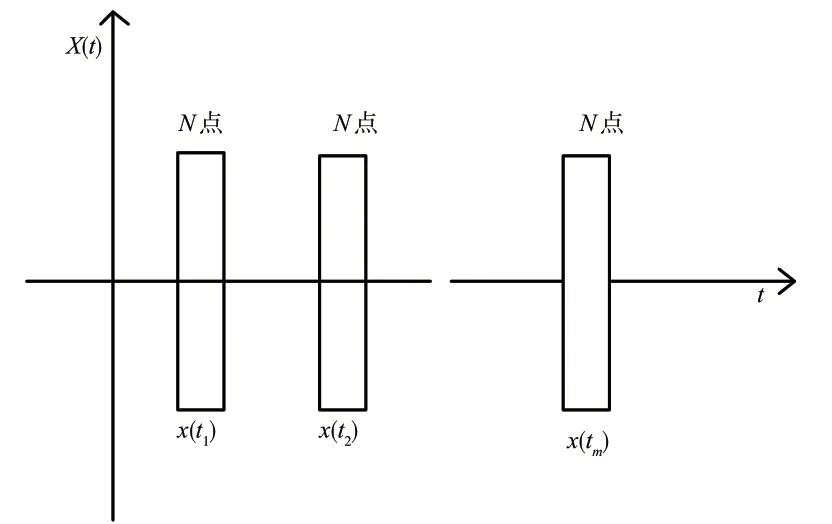
图2 相干脉冲串的构造
特别地,当m=2,称为相干脉冲对情况。此时观测信号为:

在这里,t1-t2=τ形成延时。考虑USBL 的多个阵元之间的情况时,式(18)的相干脉冲对复互相关测向估计器变为:

其中,相位差估计器为:
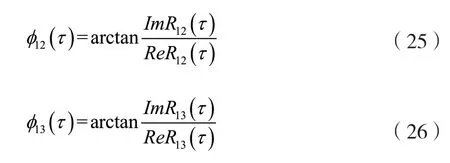
并且有:


式中:R12(τ)为阵元1、2 之间的复互相关函数,R13(τ)为阵 元1、3 之间的复互相关函数,x1(t),x2(t),x3(t)分别为阵元1、2、3 接收到的声波观测相干信号,“*”表示复数共轭。
从以上分析可看出,相干脉冲串各脉冲之间保持一定的相位连续性,因此可以通过微小型等边三元阵阵元间的相干脉冲复互相关算法得到测向结果。实际测量中,只需要测量微小型等边三元阵阵元间复互相关函数的少量相位点,而不必计算出整个复互相关函数,因此计算量大大降低。
3 算法仿真结果
仿真中,令本文微小型等边三元阵与水平面平行,两两阵元的间距为d=2.5 cm,在声速为c=1 500 m·s-1的条件下,对于微小型等边三元阵所述两两阵元间信号无相位模糊的最高频率fmax=c/(2d)为30 kHz。图3 为Matlab 系统仿真过程,主要包含信号产生、信号处理以及定位解算三部分。

图3 等边三元阵超短基线定位方法的Matlab 仿真过程
Matlab 仿真条件为:脉冲信号长度为Tw=5 ms,脉冲信号周期为Tp=1 s,采用2 个周期相干脉冲信号进行计算,采样率为fs=120 kHz,信号形式为脉冲对矩形包络填充频率为f0=20 kHz 的正弦信号加频带为19~21 kHz 的带限高斯白噪声,目标相对参考原点距离为R=20 m,目标方位角、俯仰角分别为60°、30°。图4 为带限信噪比(Signal-Noise Ratio,SNR)为30 dB 的等边三元阵仿真时域信号。
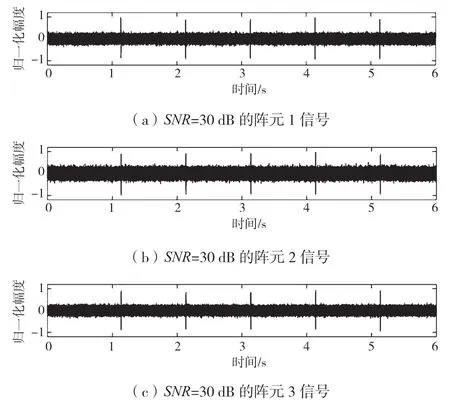
图4 仿真时域信号
图5 为等边三元阵阵型对目标进行500 次定位的结果,可以看到结果与真值位置之间的关系。

图5 等边三元阵阵型对目标定位结果(SNR=30 dB)
图6 为等边三元阵阵型对目标进行500 次的x轴和y轴定位的结果。

图6 等边三元阵阵型对目标的x 轴和y 轴坐标的定位结果
图7 为不同信噪比SNR时,对目标进行500 次定位所得x轴和y轴坐标值相对目标到参考点距离R1的定位误差,本文由斜距的千分比标准差代表定位误差‰R。以x轴为例:
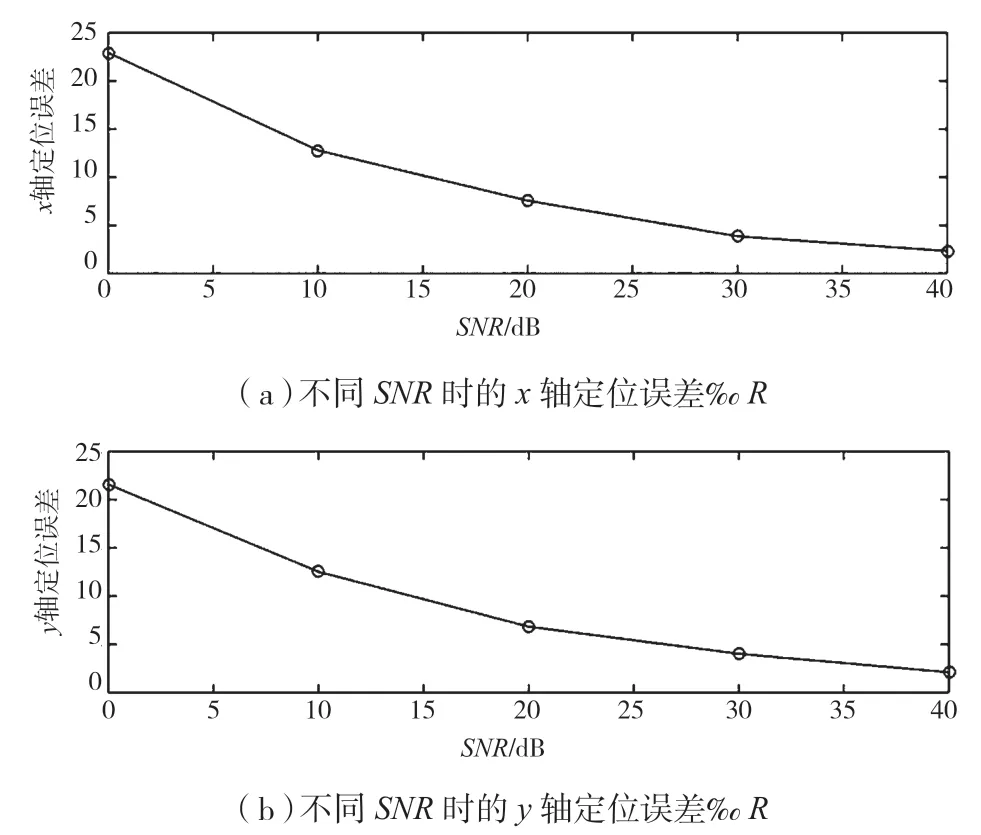
图7 等边三元阵阵型对目标的x 轴和y 轴坐标的定位误差

式中:xi为第i次根据相应算法得到x轴的坐标值,为仿真中设定的真值。
4 系统实现与试验结果
4.1 系统实现
根据微小型等边三元阵USBL 定位原理及算法,完成了一套基于数字信号处理器(Digital Signal Processor,DSP)的水声定位硬件接收系统。该系统由目标微弱信号调理、模数转换、现场可编程门阵列(Field Programmable Gate Array,FPGA)控制以及DSP 处理等部分组成。系统结构如图8 所示。

图8 水声定位系统结构框图
微小型等边三元阵各阵元接收的水声信号经过放大滤波调理后,使用低功耗A/D 转换器转为数字信号;FPGA 控制同步数字采集,经过FIFO 缓存后,通过EMIF 接口发送给DSP 进行信号处理;DSP 信号处理完毕后,将处理结果通过EMIF 传给FPGA,FPGA 最后负责将结果通过驱动显示屏幕进行显示。具体微小型系统的模拟和数字硬件电路如图9 所示。
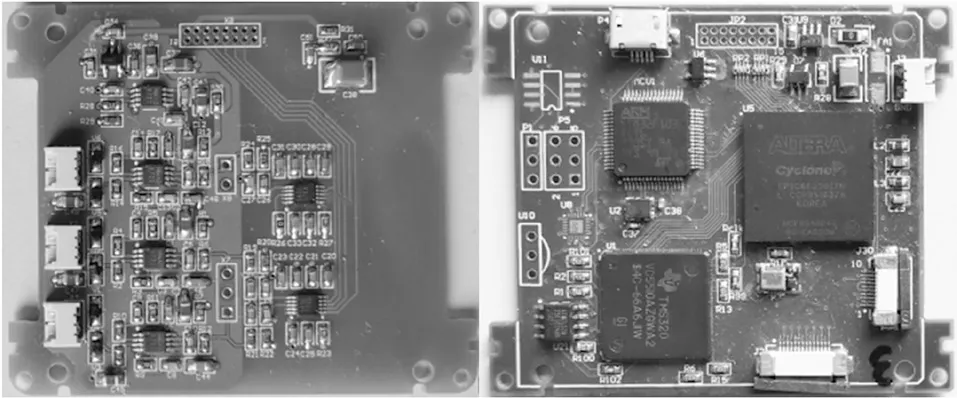
图9 系统硬件电路图
4.2 试验结果
为了对研制的微小型等边三元阵USBL 定位系统进行性能评估,在千岛湖进行了系统试验,并对本文的复互相关测向算法进行了验证。试验时,湖面平静,微小型等边三元阵固定布设,布设平面与水平面平行。目标小船载有水声信标,微小型等边三元阵与水声信标的布设水深为3~5 m。水声信标发射周期性脉冲信号,在与微小型等边三元阵系统同步后,开始远离微小型等边三元阵系统。试验结果如图10、图11 所示。

图10 对照GPS 定位的等边三元阵USBL 定位系统试验结果
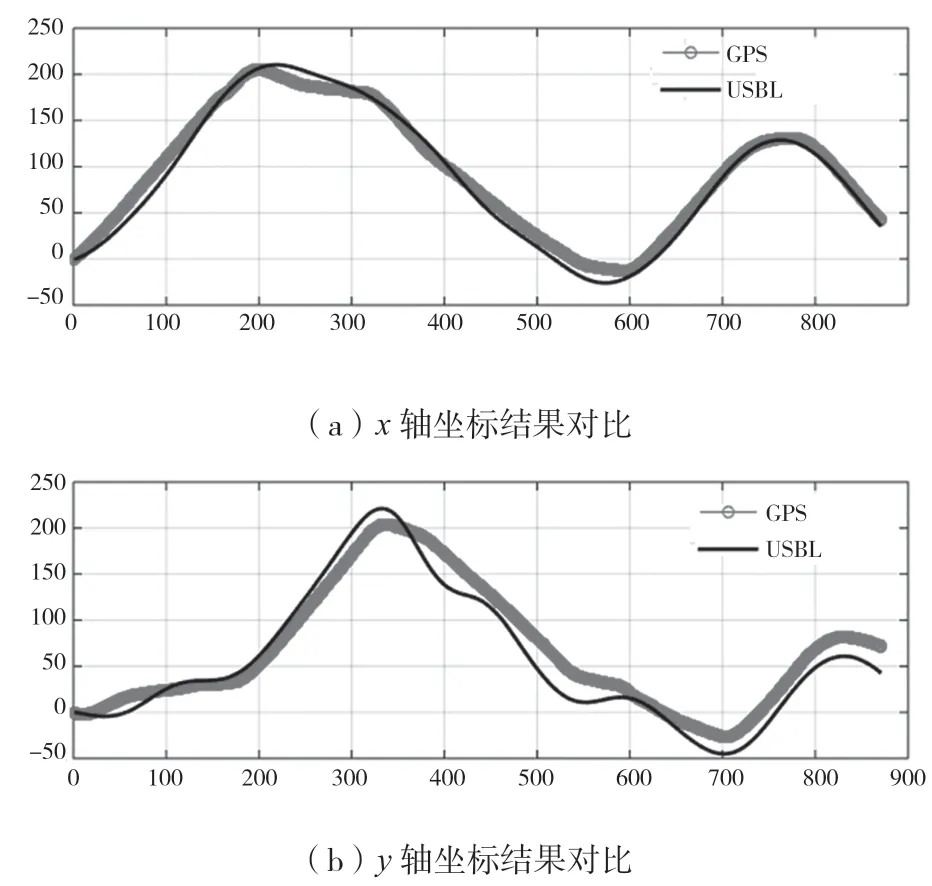
图11 x 轴和y 轴坐标(正东和正北)结果比较
试验中,以微小型等边三元阵为原点,对水声信标的位置进行测量。图10 中,粗线为信标在此次试验中所走的航迹,由GPS 获得;细线为用微小型等边三元阵USBL 定位得到的信标大地坐标。粗线与细线基本重合,说明了该微小型等边三元阵USBL 定位方法的正确性。
图11 给出了GPS 与微小型等边三元阵USBL定位的结果比较。经计算,本次试验得到x(正东)方向相对GPS 的标准差为8.56 m,y(正北)方向相对GPS 的标准差为16.36 m。相比于GPS 试验结果,微小型等边三元阵USBL 定位方法仍存在较大误差,需要在今后加以改进。
5 结语
本文针对水下小型UUV、潜水员等慢速目标的浅水探测与定位实际应用,提出了一种基于微小型等边三元阵的超短基线(USBL)定位方法,通过相干脉冲串复互相关算法来对水声信标进行定位。该方法的基阵尺寸小、易于安装或携带,经济成本和制作难度大大降低,同时,该方法保证了在一定距离上的定位性能,具有较好的应用价值。进一步完成了一套基于DSP 的微小型USBL 定位系统,使所提出的方法在工程上得以有效实现,仿真和试验结果验证了方法的正确性。
需要说明的是,本文的微小型等边三元阵的超短基线(USBL)定位方法基阵为水平阵。由于基阵在垂直方向上没有孔径,俯仰角度的估计并不准确。另外,姿态的变化也会对实际测量产生影响,这就要求水下小型UUV、潜水员在实际使用过程中尽量保证基阵与水平面平行。但是,上述限制与其优点相比,该方法仍不失为一种可行的定位方案。
猜你喜欢
水下无人系统学报(2018年5期)2018-11-09 07:40:54
铁道通信信号(2018年3期)2018-04-19 02:32:56
声学与电子工程(2017年1期)2017-06-22 11:30:07
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
西北工业大学学报(2015年3期)2015-12-14 13:08:44
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
声学技术(2015年1期)2015-09-07 06:44:52
水道港口(2015年1期)2015-02-06 01:25:45
