一种基于概率统计的列车定位算法
2022-04-26 12:36:00邓浩江
铁路通信信号工程技术 2022年4期
邓浩江
(陕西铁路物流集团有限公司,西安 710000)
列车定位技术的发展经历多个阶段,从早期的轨道电路、里程计,到应答器与全球导航定位系统的应用,列车定位的准确性和实时性要求越来越高。目前列车上采用较多的定位系统是基于GNSS和车载传感器的组合定位系统,未来列车定位技术的发展趋势必然是尽量减少对地面轨旁设备的依赖,减少地面设备维护成本。目前全球卫星导航系统在列车定位技术中的应用越来越多,基于卫星导航的列车定位技术,依靠车载电子地图和地图匹配算法将卫星导航信息转换为一维轨道里程信息,减少了列车定位系统对地面设备的依赖。同时地图匹配算法应考虑车载安全计算机的计算负担,充分利用电子地图的拓扑结构,尽量提高地图匹配算法的效率。
常见电子地图算法主要包括点到点的地图匹配算法、点到线的地图匹配算法和线到线的地图匹配算法。近年来有很多学者提出了基于以上3种算法的组合或改进算法等,如基于滤波的地图匹配算法、基于极大似然估计的地图匹配算法、基于权重的地图匹配算法等。本文提出了一种基于概率统计的点到线地图匹配算法,基于列车定位系统的误差特性,在待匹配定位点的周围建立置信区间,利用电子地图的拓扑结构,快速搜索所有进入置信区间的候选轨道片段。然后通过建立匹配误差函数,综合计算待匹配定位点在距离和速度方向上与候选轨道片段的匹配度,选取匹配度最高的轨道片段作为匹配结果。最后计算定位点在轨道片段上的里程数,实现地图匹配的全过程。
1 候选轨道片段的预处理
本文所采用的电子地图数据是由车载高精度定位测量模块以测量点为单位在列车所在轨道上测量得到的。采用分级结构建立电子地图的索引,第一级结构为车站,第二级结构为轨道,第三级结构为轨道片段,每个轨道片段由片段头和片段尾两个测量点构成。测量值为测量点的经度、纬度和高程信息。假设测量点之间距离足够小,每个轨道片段都可以认为是直线线段。
列车卫星定位的数据受到很多误差的影响,包括卫星相关的卫星轨道误差、卫星钟差和相对论效应等,以及卫星信号在大气层传播过程中受到的电离层、对流层延时,卫星信号的遮挡、多路径效应等,还包括接收机相关的接收机钟差、接收机硬件延迟以及测量噪声等。在二维平面上,定位误差表现为无数个等概率密度的误差椭圆。以卫星定位原始点为圆心,沿经纬度方向选取坐标轴,构建坐标系,则误差椭圆的相关参数如下。
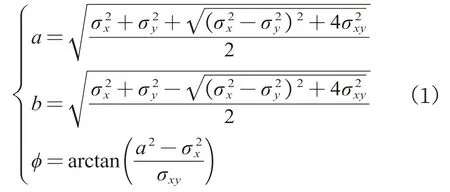
公式(1)中,a表示误差椭圆的半长轴,b表示误差椭圆的半短轴,φ表示误差椭圆的偏转角;σx表示定位数据经度方向的方差,σy表示定位数据纬度方向的方差,σxy表示定位数据的协方差。
地图匹配算法的预处理过程就是利用电子地图的拓扑结构将所有进入定位数据置信区间的候选轨道片段寻找出来。预处理流程如图1所示。

图1 预处理流程Fig.1 Flowchart of preprocessing
2 匹配误差函数的建立
在获得候选轨道片段的集合后,计算每个轨道片段的距离偏差和方向偏差,距离偏差是指卫星定位点到终止点构成的线段的距离,方向偏差是指卫星定位点与上一个定位点之间计算得到的速度方向与轨道片段线段的方向之间的偏差角。距离偏差与方向偏差乘以各自的权重后,得到地图匹配的误差函数,误差函数值最低的轨道片段作为列车地图匹配的结果。误差函数如公式(2)所示。

公式(2)中,D表示距离偏差,φ表示方向偏差。
2.1 距离偏差计算
以待处理的轨道片段起始点为原点,经纬度方向为坐标轴建立坐标系,以向量方式表示各点和线段,如图2所示。
图2中A点表示坐标原点,也是轨道片段的起始点,其经纬度信息为(LonA, LatA)。B点表示轨道片段的终止点,其经纬度信息为(LonB, LatB)。C点表示待匹配的卫星定位点,其经纬度信息为(LonC, LatC), 向量LatA),向量由C点向AB线段做投影,得到交点D,利用向量的点乘和叉乘计算向量的长度:
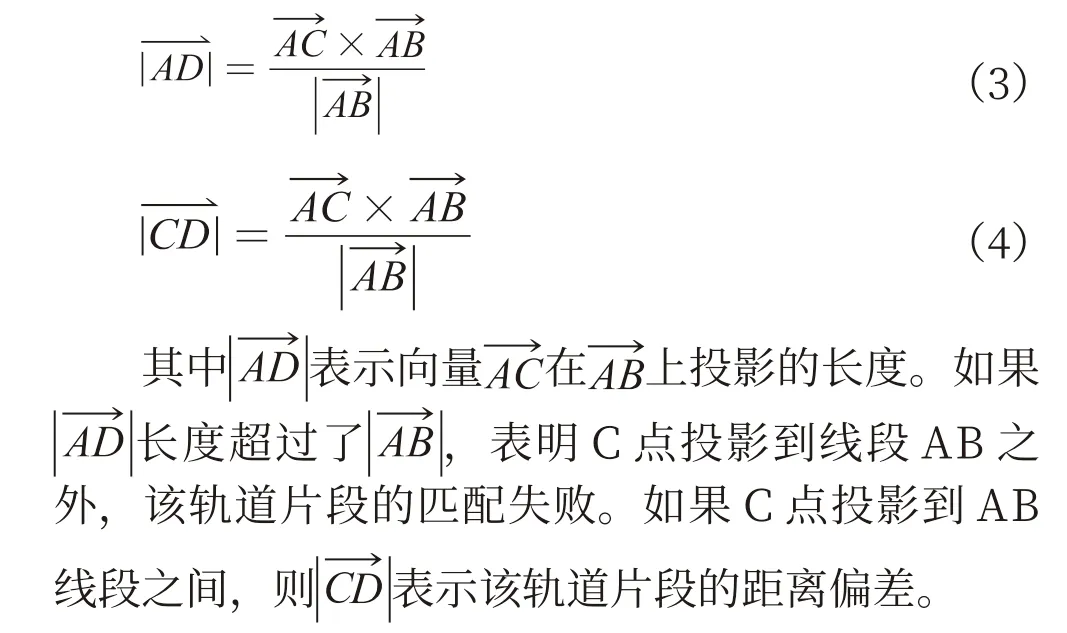
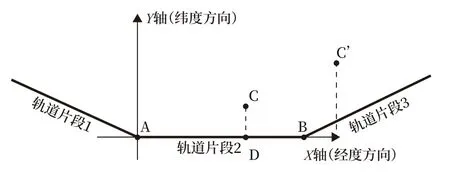
图2 轨道片段处理Fig.2 Processing of track segments
2.2 方向偏差
卫星定位数据的航向角通过当前定位点与前一定位点计算获得,轨道片段的方向通过电子地图数据库中多个测量点计算获得。由于列车运行速度较低时,受卫星信号接收机及列车车身抖动等影响,卫星定位数据计算得到的航向角会有较大的偏差和跳变,因此设定辅助参数T:

公式(5)中,V为列车运行的速度,Vlow为列车低速阈值,其取值由卫星信号接收机的性能决定。
2.3 点到线的地图匹配算法
选取候选轨道片段中匹配误差函数值最小的轨道片段作为地图匹配的结果进行点到线的地图匹配计算,其过程就是计算卫星定位点C到轨道片段AB的投影点D在一维轨道线路上的里程数,作为地图匹配算法的输出结果。
轨道片段起始点A与终止点B在一维轨道线路中的里程数可以在电子地图数据库中得到,分别记为LA和LB。根据几何比例关系,可以得到如下的关系式。
LD为卫星定位数据在轨道片段AB上的匹配点的里程数,至此地图匹配过程结束。
3 地图匹配算法流程
匹配算法流程如图3所示,具体实现步骤如下。
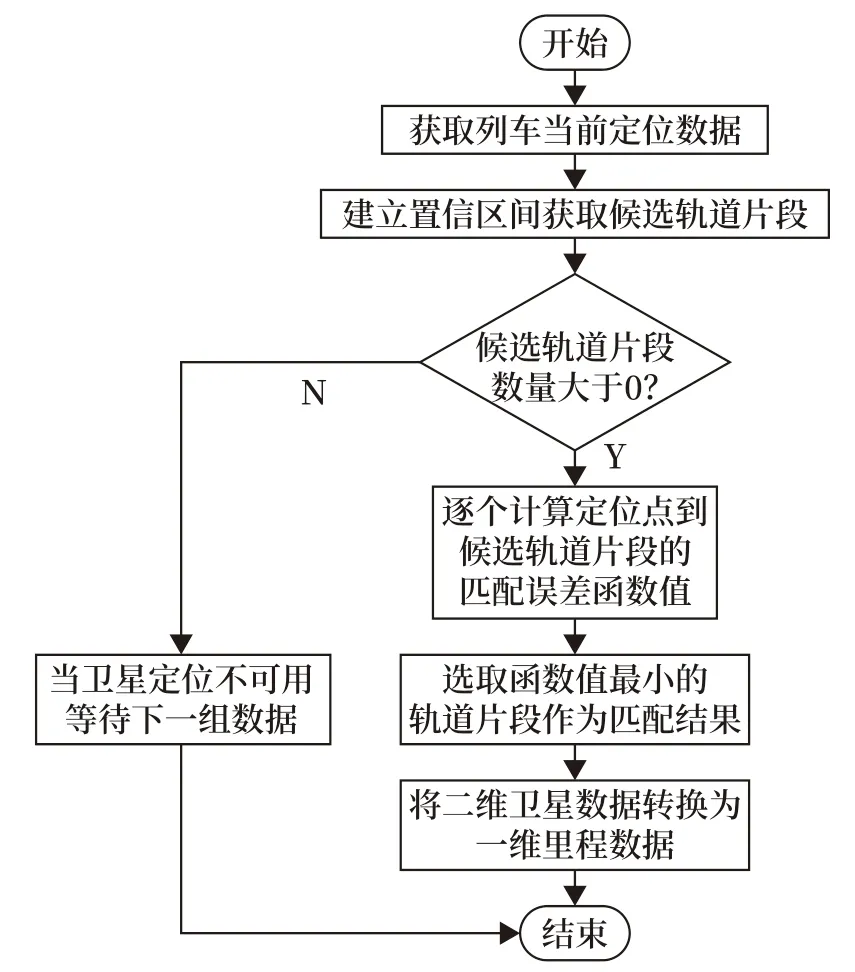
图3 地图匹配算法流程Fig.3 Flowchart of the map-matching algorithm
1)输入列车当前时刻的定位数据。
2)基于定位数据的统计特性,建立定位数据置信区间,利用电子地图的拓扑结构搜索得到置信区间内的所有候选轨道片段。
3)如果置信区间内没有轨道片段出现,放弃这组数据,返回步骤1。
4)计算卫星定位点到每个轨道片段的匹配误差函数值,选取函数值最小的轨道片段作为地图匹配算法的结果。
5)将GNSS定位数据转换为匹配轨道片段上的一维里程数据。输出里程数据。
4 仿真验证
本文使用铁路仿真系统对地图匹配算法进行仿真分析与验证,使用的电子地图由高精度定位测量模块在铁路轨道上采集得到,数据精度小于0.2 m,轨道采样点间隔不超过3 m。列车模拟在轨道上运行时的地图匹配结果如图4所示。
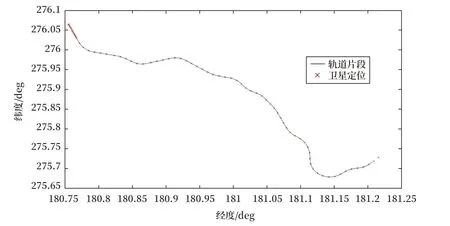
图4 地图匹配结果Fig.4 Map matching results
图4中红色标记点表示列车运行过程中获得的卫星定位点,蓝色线表示由卫星定位点经过地图匹配算法得到列车轨道片段的连线,构成列车运行线路图。
从仿真结果可以看出,本文所提的地图匹配算法具有较好的准确性和实时性,可以满足列车运行过程中实时地图匹配的计算需求。
5 结论
本文以点到线地图匹配算法为基础,引入卫星定位数据置信区间的概念,利用电子地图的拓扑结果,缩小地图匹配算法索引范围,提高地图匹配算法的计算效率。通过设计地图匹配误差函数,确定地图匹配的最终轨道片段,并将二维卫星定位数据转换为一维里程数据作为地图匹配算法的输出结果。最后的仿真过程验证了所提算法可以满足列车控制系统对地图匹配算法的实时性和准确性要求。
猜你喜欢
猪业科学(2024年1期)2024-02-27 10:14:24
电气化铁道(2023年6期)2024-01-08 07:45:48
保健医苑(2021年9期)2021-09-08 14:38:06
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
电气化铁道(2018年4期)2018-09-11 07:01:38
金色少年(奇趣科普)(2017年4期)2017-06-05 15:03:46
测绘科学与工程(2017年5期)2017-05-07 06:30:46
系统医学(2016年8期)2016-02-20 02:55:08
中国教育技术装备(2015年21期)2015-03-11 20:16:06