面向散斑纹理图像的相机聚焦评价算法
2022-04-25 11:49苑文楠贾彦翔蒋大伟欧阳铜邱旭阳
计算机测量与控制 2022年4期
苑文楠,贾彦翔,蒋大伟,欧阳铜,雷 春,邱旭阳
(北京机械设备研究所,北京 100854)
0 引言
光测法是将各种光学原理与力学原理结合的一种测量手段,具有非接触、全场测量、高自动化、高精度和高灵敏度等方面的优势[1]。散斑测量法作为一种基于图像处理技术的现代新型光测方法,最早于20世纪80年代,由Yamaguchi[2]和Peters[3]等人共同提出,其原理是首先在被测目标表面制备随机性散斑纹理图案,使用工业相机采集被测目标运动过程图像序列,然后利用相关搜索技术跟踪匹配相邻时刻图像中同名点的像素变化,最终换算成位移或形变。根据目标表面的变形形式,又可分为用于面内变形的二维散斑测量法和用于离面变形的三维测量法。散斑测量法凭借着试验设备简单、成本较低、操作难度小、测量范围广等优势,目前已在固体力学、生物医学、土木工程、航空航天等众多领域发挥重要作用并得到了认可。
工业相机是散斑测量法的重要试验设备,调整镜头的聚焦状态便成了试验过程中重要的一步。根据实现方法的不同,可将自动聚焦大致分为4类[4-6]:1)测距法。利用红外或超声波测量目标距离,根据光学高斯公式计算像距实现镜头焦距调整,但该方法对斜面目标、小目标或吸收红外光目标的应用上具有一定难度;2)焦点检测法。通过对比被测目标在两路对称光学镜头中的成像效果,来判断清晰聚焦的状态,但该方法对高速目标、细小目标或含有偏光特性的目标进行聚焦比较困难;3)半数字式调焦法。通过实时采集并分析评价图像,并依照评价结果驱动控制器调整镜头,当评价值位于极值时,认为达到了最佳聚焦状态。由于整个过程完全取决于图像本身,因此可能出现因采集延迟导致的调焦不稳定现象,这就要求图像评价函数具有较高的时效性;4)全数字式调焦法。先后计算图像点扩散函数,利用数字滤波重建图像从而完成调焦,但该方法受限于图像离焦量,且对计算机硬件配置要求较高。
本文基于半数字式调焦法,探究面向散斑测量应用中工业相机的聚焦状态调整过程,根据图像灰度共生矩阵的3个典型特征量,建立适用于散斑纹理图像的聚焦评价方法。通过在不同类型、不同环境下的试验,将本文所提方法与传统评价函数对图像聚焦状态的判断结果进行对比,验证本文方法的有效性以及对散斑纹理图像更好的适用性。
1 传统聚焦评价算法
1.1 聚焦状态对测量结果的影响
散斑测量法要求图像采集过程,相机的参数始终不变。因此在实际应用中,通常使用定焦工业镜头,通过操作员手动调节镜头焦平面,并根据肉眼进行判断。但由于对最佳聚焦状态没有统一的判断标准,可能会导致测量结果的不确定性,甚至引起测量歧义。为证明这一结论,使用三台相同配置的工业相机和镜头,三台相机的摆放位置到试样表面的垂直距离相同,采集过程中保持散斑区域受均匀强度光照,以确保客观环境一致。调整相机分别处于不同聚焦状态进行采集,计算各组图像序列中心区竖直方向的平均应变曲线,如图1所示。可以看出,同一组试验中,镜头聚焦状态的不同,会导致计算结果存在明显差异。因此,对镜头聚焦状态的量化方法的研究,以辅助操作员调节,保障测量结果的准确性就显得十分必要。
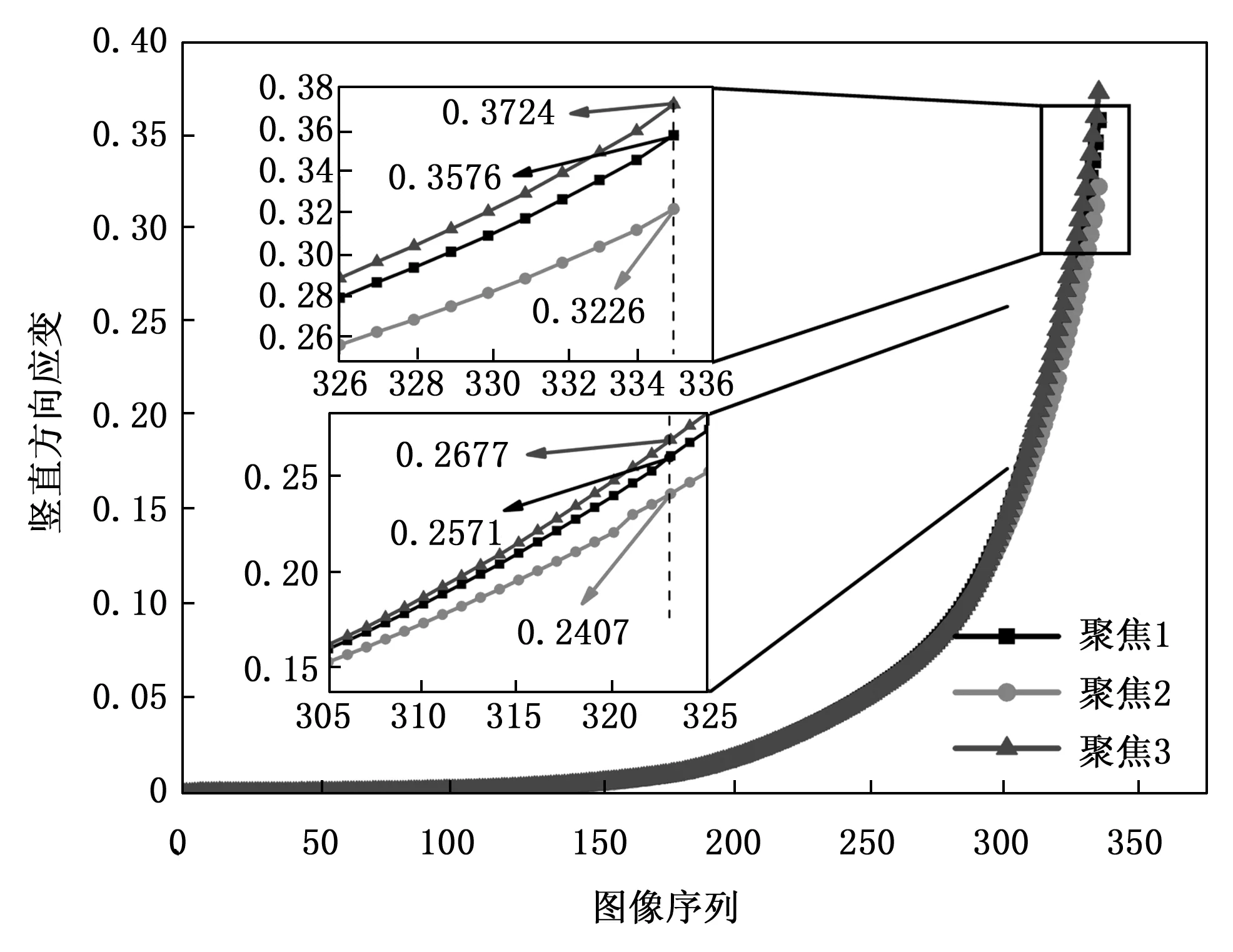
图1 不同聚焦状态下的测量结果
1.2 聚焦评价算法的特性
从光学成像角度,清晰图像比模糊图像具有更鲜明的对比度;从图像处理角度,聚焦图像比离焦图像具有更多的边缘细节和图像信息。因此,可以根据图像灰度梯度或频域中高频分量所占比,判断图像的聚焦状态[7]。一般地,聚焦评价算法需要具备以下几点特性:
1)单峰性。聚焦评价曲线应只包含一个极值点。当图像清晰聚焦时,评价结果达到极值位置;而离焦时的评价结果明显低于极值。
2)无偏性。聚焦评价曲线极值两侧应具有明显的单调性,通过曲线趋势可体现出镜头从离焦到聚焦再到离焦的调节过程。
3)高信噪比。聚焦评价算法需要适用于不同情况的试验,对于光照变化、环境噪声、镜头参数调整等因素,需具有一定的稳定性。
4)实时性。聚焦评价算法的计算量尽量少,实现快速调焦过程。
1.3 常用的聚焦评价算法
目前,学者提出了很多聚焦评价算法,根据原理可分为时域分析法和频域分析法两类。时域分析法是基于图像灰度方差提出的[8-12],当图像完全模糊时,各像素点灰度值相近,图像灰度方差较小;当清晰聚焦时,边缘细节信息明显,相邻位置灰度值相差较大,即图像灰度方差较大。
1.3.1 时域分析法
常用的时域分析法主要包括以下几种:
1)能量梯度算法。利用图像相邻点的差分计算图像梯度,并将图像梯度平方加强边缘贡献。表示为:
(1)
式中,(x,y)为图像像素坐标,▽fx和▽fy为水平方向和竖直方向梯度。
2)Tenengrad算法。该算法是基于Sobel算子提出的[13],可以在某种程度上抑制图像噪声。表示为:
(2)
式中,▽fx和▽fy为水平和竖直方向上通过Sobel算子得到的图像梯度。
3)Prewitt算法。该算法是基于Prewitt算子提出的[14]。表示为:
(3)
式中,Mimg和Nimg为图像尺寸,▽fx和▽fy为水平和竖直方向上通过Prewitt算子得到的图像梯度。
4)Brenner算法。又称梯度滤波器法,是一种简单的评价方法,通过计算水平方向上相邻像素梯度的平方作为评价标准。表示为:
(4)
5)Roberts算法。该算法利用图像四邻域的灰度值进行计算,可以较好地处理图像边缘特性。表示为:

(5)
6)Laplace算法。该算法是基于Laplace算子所提出,由于图像二阶导数的引用,使得该算法受噪声影响较大。表示为:
(6)
式中,▽fmask为原图像与掩模卷积结果:
(7)
1.3.2 频域分析法
在数字图像处理中,低频部分表征图像对比度和动态范围,高频部分决定了图像边缘轮廓和细节特征[15-17]。频域分析法利用二维傅里叶变换将图像从时域空间转到频域空间,通过统计高频分量实现图像聚焦状态的评价,表示为:
(8)

但由于该算法涉及了复数计算,大大地增加了计算复杂度,不符合聚焦评价算法对实时性的要求。为此,可使用离散余弦变换只针对实数部分进行计算[18],表示为:
(9)
式中,Df(uf,vf)为变换系数矩阵,表示不同频率分量;Df(0, 0)为直流分量;af(uf)和af(vf)为补偿系数。
通过式(9)定义离散余弦傅里叶变换评价算法,表示为:
(10)
2 基于灰度共生矩阵的聚焦状态评价算法
灰度共生矩阵(GLCM,gray level co-occurrence matrix)用于描述图像中指定距离的两像素点灰度级别的联合概率分布情况,是纹理图像的各灰度级在空间上的二阶统计量[19-20],利用灰度共生矩阵可以较好的反映图像纹理信息。GLCM的计算是统计图像中距离为dg、方向角为θ的两像素点灰度值等于指定灰度级别的像素点数量。例如,尺寸Mimg×Nimg的图像f中,两像素点(x1,y1)和(x2,y2)的GLCM可表示为:
pg(i,j,dg,θ)=

三峡旅游在空间形态上基本呈现一轴两极三片的空间格局,这其实是一种边界的固化,反映出区域间的合作较少。同时,武汉、成都、重庆都市周边特色旅游地的成熟也在一定程度上遮蔽三峡旅游形象,三峡旅游已非首选旅游目的地。三峡旅游必须进一步提炼特色,丰富旅游形式,积极谋求新的发展,如从长江沿岸转向三峡腹地,逐步形成一种多元的而非固化的空间边界。
(11)
式中,距离dg和方向角θ是两像素点的位置关系,如图2所示。
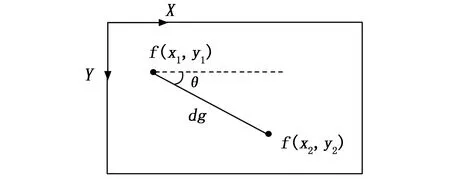
图2 灰度共生矩阵中两像素点位置关系
GLCM共包含28种纹理分析特征量[18-21],本文选择其中的4种:
1)熵。熵值反映了图像信息量,清晰纹理对于熵值有正贡献作用。离焦图像的散斑特征不明显,熵值较小。随着图像逐渐聚焦,散斑边缘逐渐清晰,熵值呈逐渐增大趋势。熵值计算公式为:

(12)
式中,LG为图像灰度级别。
2)惯性矩。也称为对比度,反映了相邻像素灰度值的变化范围,即图像的清晰程度。离焦图像的纹理边缘灰度值变化较小,而聚焦图像,边缘的清晰对比度对惯性矩有正贡献作用。惯性矩计算公式为:

(13)
3)相关性。相关性反映了图像在两个方向的相似程度。散斑纹理具有极强随机分布特性,清晰纹理对相关性起反贡献作用,即离焦散斑图像对应的相关性较大,而聚焦散斑图像对应的相关性较小。相关性计算公式为:

(14)
4)角二阶矩。角二阶矩可以衡量图像灰度分布的均匀性。当图像粗纹理较多时,角二阶矩较大;细纹理较多时,角二阶矩较小。角二阶矩计算公式为:

(15)
由于在图像中无法严格比较散斑颗粒与环境纹理的大小关系,因此不宜通过角二阶矩值的变化反映出散斑区域的聚焦状态。综上,本文选择熵、惯性矩和相关性3个特征量,提出一种基于灰度共生矩阵的散斑区域聚焦评价方法,可以针对性散斑纹理区域的聚焦状态进行判断:

(16)
式中利用平方更加凸显聚焦评价结果的单峰性,同时考虑到清晰散斑对相关性的反贡献作用,相关性特征量采用了倒数形式。
3 试验验证
3.1 试验过程
分别不同环境下的基础力学性能试验中考察所提评价方法的表现。将工业相机放置被测目标正前方,在镜头焦距可调范围内匀速拨动旋钮,采集图像并使用本文所提算法和传统评价算法对每一帧图像的聚焦状态进行计算,构成对应的聚焦评价曲线,如图3所示,再反向调节旋钮,使聚焦评价位于曲线极值处。考虑到F8评价指标比F7具有更高的计算效率,因此本文用F8替代F7的计算结果。同时为避免偶然性因素,各组试验重复3次,并将计算结果归一化处理,以便于对比。

图3 采集设备的调焦过程
3.2 试验结果
3.2.1 单向拉伸试验
各组算法在单向拉伸试验图像中的评价结果,如图4所示。全部曲线均呈现明显的单峰性和无偏性,并在相同位置达到曲线极值点,结合采集图像分析,以上算法均正确判断出图像的最佳聚焦状态。
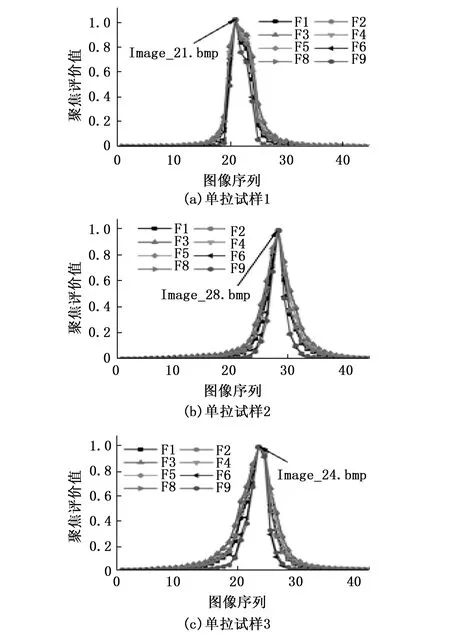
图4 单向拉伸试验中各聚焦评价算法评价结果
3.2.2 刚模胀形试验
单向拉伸图像的背景环境较为单一,为了对比复杂环境下各评价算法的表现,采集刚模胀形试验的三组图像。图像中包含除散斑平面外的模具信息,各评价算法的评价值曲线如图5所示。可以看出,各评价曲线仍具有明显的单峰性。传统评价算法定位的最佳聚焦状态时刻相同,但与本文提出算法的计算结果存在偏差。对比原始采集图像,如图6所示,可以看出,传统评价算法认为当焦平面落在模具表面时达到最佳聚焦状态,但此时散斑纹理所在平面成像模糊。而本文方法考虑了散斑纹理特性,以散斑区的清晰程度作为聚焦状态的判断依据,评价结果更准确。
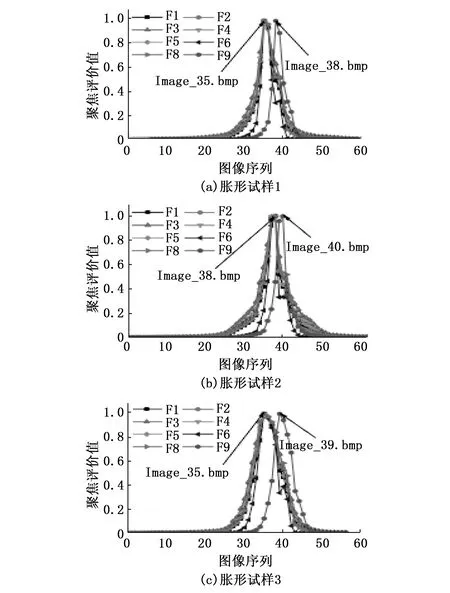
图5 刚模胀形试验中各聚焦评价算法评价结果

图6 胀形试验各评价算法最佳聚焦状态图像
3.2.3 抗噪能力
为衡量评价算法的抗噪性,针对其中一组刚模胀形试验图像添加不同类型噪声,如图7所示。其中,Noise_1、Noise_2、Noise_3是不同参数的高斯噪声,Noise_4和Noise_5分别是泊松噪声和椒盐噪声。可以看出,各评价算法在不同噪声影响下均具有较好的单峰性,虽然F6在较大高斯噪声下的计算波动较大,但对曲线极值点计算影响较小,说明以上各聚焦评价算法具有一定抗噪能力。同时,传统评价算法计算最佳聚焦状态时刻相同,但本文提出算法的计算结果更为准确。可见,在较复杂背景下,基于灰度共生矩阵的聚焦状态评价算法可以针对散斑纹理进行评价,对散斑图像具有更强的针对性和更高的实用价值。
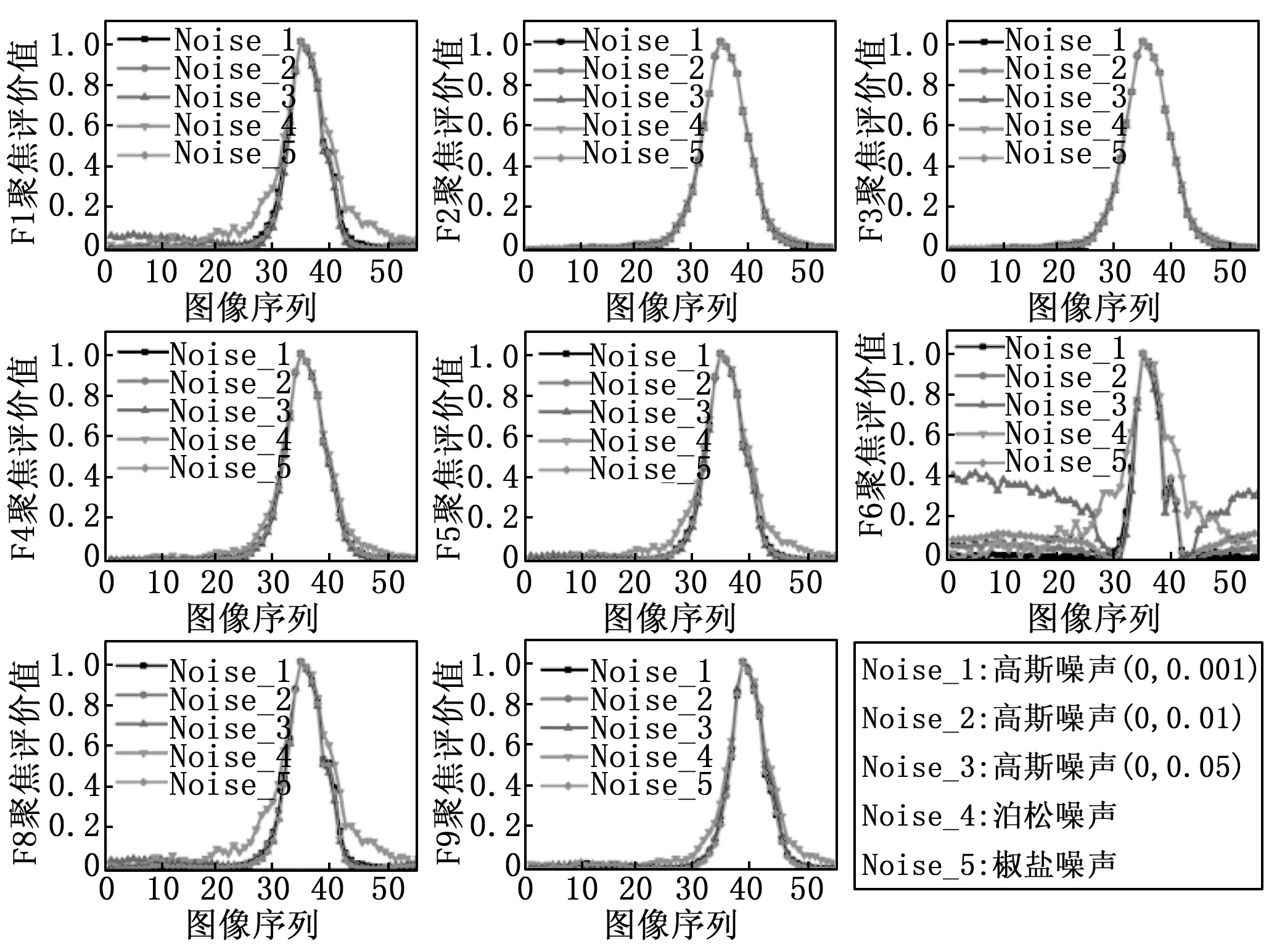
图7 噪声干扰下各聚焦状态评价算法的表现
3.2.4 计算效率
为对比计算效率,统计了以上各评价算法对单幅图像计算消耗的时间如图8所示,使用计算机配置为:Intel® CoreTMi5-6500 CPU, 16 GB内存。可以看出,在传统评价算法中,时域法(F1-F6)计算时间相近,但快速傅里叶变换(F8)由于傅里叶变换的加入导致计算量远高于时域法。本文提出算法(F9)所需计算时间也相对较长。为解决这一不足,考虑到采集过程中通常将带有散斑的目标区域置于相机视野中心,因此,可采用中心取窗的方法,即在图像中心截取一定大小的窗口代替整幅图像进行聚焦状态计算。计算窗口的缩小不仅减少了总计算量,也能在一定程度上避免了复杂环境对评价结果的干扰。

图8 各评价算法的计算时间分布
综上研究可以得出结论,在背景环境简单、散斑为图像主要信息来源的情况下,传统聚焦评价算法有较高的计算效率,可以快速准确定位到图像最佳聚焦状态时刻;但当环境干扰因素较多、图像信息复杂时,本文提出的评价算法可以考虑散斑纹理的特点,以散斑所在区域的聚焦状态作为聚焦判断结果,更接近事实。为实现镜头的全自动调焦过程,也可依据评价结果直接驱动镜头调节控制器,从而保证调焦精准性,减少调整过程对操作员的依赖,进一步避免测量的不确定性。
4 结束语
本文针对光学测量中镜头的聚焦评价算法进行研究,结合散斑纹理特性,提出了基于灰度共生矩阵熵、惯性矩和相关性3个特征量的聚焦评价算法。当试验环境简单、散斑为图像主要信息来源时,传统聚焦评价算法计算效率较高,可快速定位图像最佳聚焦状态时刻;当试验环境复杂、图像干扰因素较多时,传统评价算法判断不准确,而本文所提算法可以排除环境因素干扰,以散斑所在平面的聚焦状态作为最终评价结果,判断更准确,具有更广泛的适用范围,可为后续的精确测量提供一定的保障。
猜你喜欢
包装工程(2022年9期)2022-05-13
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
领导文萃(2019年8期)2019-04-19
读友·少年文学(清雅版)(2018年12期)2018-04-04
科技创新导报(2014年28期)2014-12-01
中国摄影(2014年8期)2014-11-07
中国摄影(2014年3期)2014-06-06
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
现代电子技术(2009年9期)2009-06-25