基于三维定位技术的水文地质测绘方法研究
2022-04-25 11:49仲跻文
计算机测量与控制 2022年4期
仲跻文
(长江水利委员会水文局 长江下游水文水资源勘测局,南京 210011)
0 引言
现如今,水文地质测绘工程的传统方法已经无法满足需求,这是由于水文地貌十分复杂,不同地势环境下会阻挡、反射和绕射信号,当信号完全被阻断时,全球导航卫星系统(GNSS,global navigation satellite system)在该地区根本无法定位,从而降低了信号的几何结构[1]。近年来,3D地质建模、3D-GIS和BIM技术取得了快速发展,为改善水文地质测绘的GNSS定位提供了机会,这些技术为数据集成、空间分析、模型构建和三维数据可视化提供了各种方法。在这些技术的支持下,一些使用3D空间数据模型(如网格)的3D方法已被用于评估UUS规划的地质适用性,但在图像获取、卫星定位等方面仍存在诸多问题[2-3]。
针对上述问题,文献[4]提出了一种基于无人机的信息化测绘系统,由于采用了遗传算法进行优化过程,保证视图覆盖率的耗时空间探索变得更加有效。然而,该方法大多只进行2D感知和定位,这对视图信息的获取非常不利。文献[5]通过整合水文地质各种评估因素的参数值,然后使用平面方向的网格划分计算水文地质模型的适用性结果。然而,这种方法不能将水文地质数据与固有的3D属性或复杂的空间结构结合起来,并且总是会导致深度信息的丢失。
1 系统结构及原理
对于水文地质测绘方法,本研究基于雷达卫星与物联网平台构建了信息化水文地质测绘系统,系统结构及原理如图1所示。
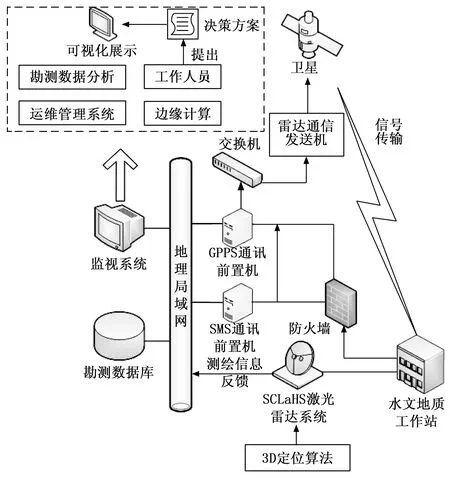
图1 信息化水文地质测绘系统
下面通过图1对本研究的工作原理进行说明,在信息化水文地质测绘系统上,监控自动化系统可以收集信息化测绘系统的状态(例如,CPU使用率,带宽,数据量,功耗等),并每隔一段时间将状态信息发送到边缘节点,每个节点中的传输模块均进行数据压缩和恢复,经处理的测绘视图在节点之间传输[6]。在信息化水文地质测绘系统中,推理引擎组件对需要计算和存储资源的测绘数据进行最终处理。数据传输的过程主要包括序列化、数据包传输、解析与反序列化。测绘数据流被推送到云端进行处理,信息化测绘系统在每个节点上分配数据处理,数据主体以JSON字符串的格式设置,可以根据数据大小来确定数据包的范围[7]。其中,网络通信协议包括SMS无线网、GPRS无线网和光纤网,并提供提供SMA-COM,该接口具有专用串行通信,可从/到IED之间进行通信,并提供了TCP/IP通信。数据信息通过转换,经过路由器和防火墙之后,通过各种网络类型的前置机到达了光端机,经过交换机以及通信发送机传递给中高空卫星[8]。
2 系统硬件设计
2.1 SCLaHS激光雷达系统的设计
为了得到精准的3D水位地质图,本研究设计了一种SCLaHS(supercontinuum laser hyperspectral)雷达系统,其原型由扫描镜、惯性测量仪(IMU,inertial measurement unit)、GNSS与发射光子系统等几个模块组成。通过稳定可靠的底座将每个模块紧凑、轻质和高结构集成。此外,收发器子系统使用柔性和可弯曲光纤将激光器和检测子系统耦合,以实现高紧凑性和柔性模块,激光光源也被压缩在一个轻巧的小模块中[9]。最后,可以组装SCLaHS激光雷达原型(见图2),该原型可以达到以下规格:
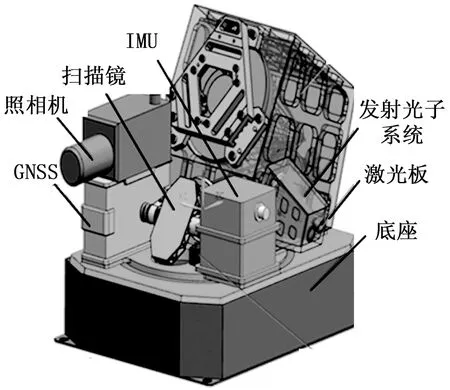
图2 SCLaHS激光雷达原型
光学规格:光谱范围:400~900 nm,光谱分辨率≥10 nm,频带数≥50,帧速率≥200 fps,激光全波形回波的量化数量:12位。
勘测规格:探测距离≥500 m,视野≥30°,激光足迹的大小≤0.1 mrad,激光点间距≤1 mrad,测距分辨率≤1 mm,发射和接收的联合对准精度≤0.2像素,视线稳定精度≤0.1 mrad。
激光种子源规格[10]:脉冲宽度≤2 ns,平均输出>5 W,重复频率:20 kHz~10 MHz,连续工作时间:4 000 h,400~900 nm的平均光谱功率密度≥15 mWnm-1。
对于SCLaHS雷达原型中多个传感器同步控制,其包含一个通过中央控制单元控制的高频时钟。生成的高频时钟用作整个SCLaHS雷达系统的参考基准。整个系统通过同步触发控制电路协同工作,各个组件的工作时序系列如图3所示。
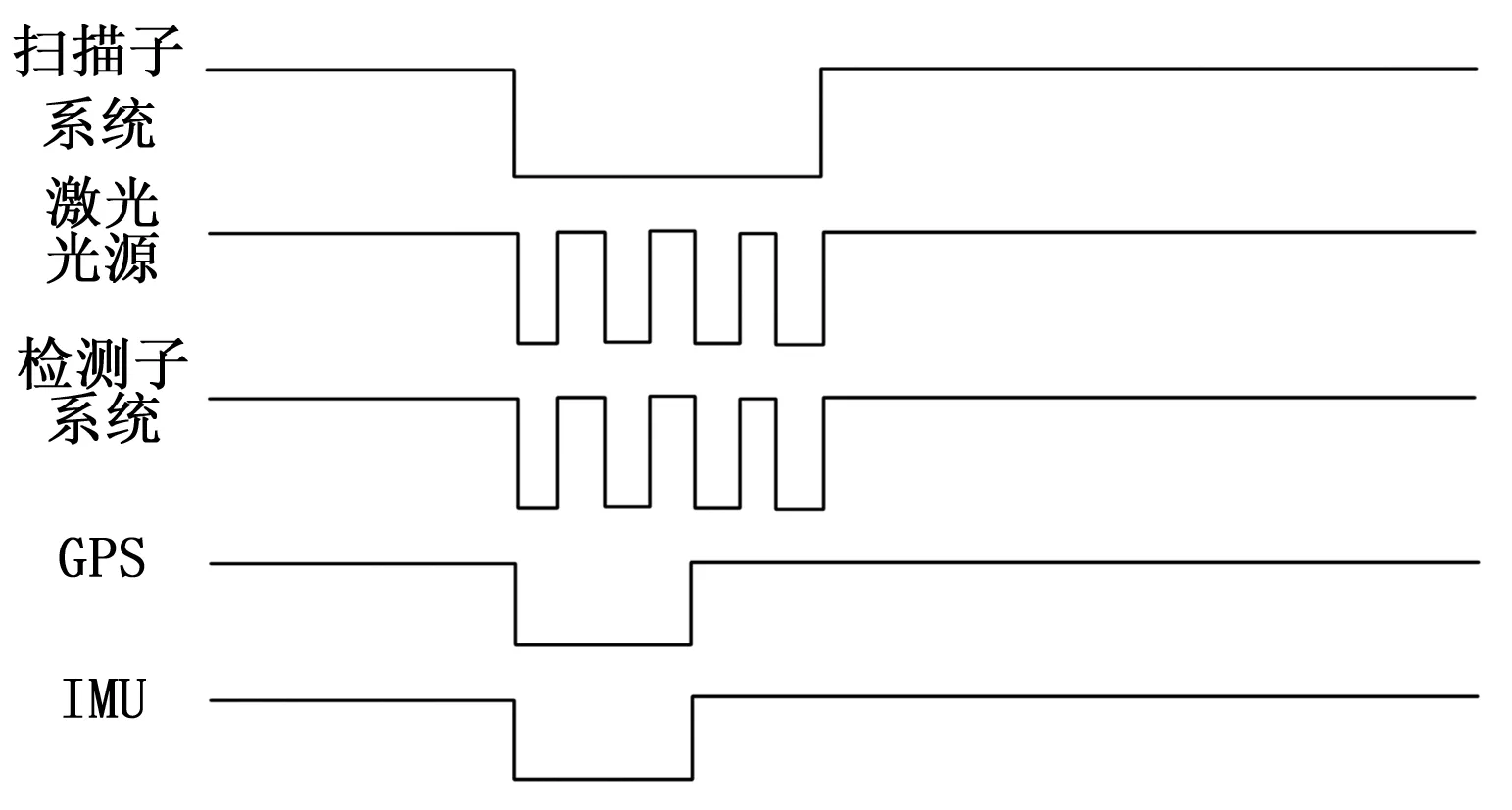
图3 各个组件的工作时序系列
此外,本文还利用高频帧相机辅助图像几何校正,提高了机载观测数据的处理效率。为了最小化由负载系统颤振引起的接收辐射的时域色散效应,将带被动低通滤波的隔振装置和带主动瞄准稳定的稳定平台结合起来,以控制整个观测的稳定。SCLaHS激光雷达的结构还包括以下两个关键部分,关键技术设计如下文所示。
2.1.1 双面镜摆扫描系统
双面镜摆扫描系统旨在实现输出光束的准直和扩展,减小光束的发散角,提高远场激光束的辐射强度。该子系统使用双面镜摆扫描系统,以实现30°以上的视线方向角。回波信号的全波形同步检测通过激光发射器和接收光学子系统以及回波检测子系统的同轴/同轴孔径实现,激光超光谱发射使用背对背的反射镜以周期形式扫描整个周期,交叉飞行方向扫描结合移动平台,以并行模式实现逐条勘测[11]。收发器光学子系统的高精度孔径采用垂直光轴设计,在光路上放置45°折叠镜,使发射器和收发器光轴平行,通过精确调整折叠式反射镜和收发机光学系统的合理孔径比,可获得高于0.2 mrad共对准精度的光学系统,双面镜摆扫描系统如图4所示。

图4 双面镜摆扫描系统
如图4所示,为了制作该子系统中最主要的反射镜之一的凸面双曲面,采用后球面零点补偿标定和自准直法检测光路是否存在干涉。对于二次反射镜,即圆锥非球面反射镜,采用零位补偿法对镜形精度进行标定和补偿。将基于像差补偿的最优收敛算法应用于固定自由度定量自动系统的安装中。
2.1.2 超连续谱激光源
为了产生超连续谱激光源,引入组件皮秒光纤激光振荡器(FPLO, fiber picosecond laser oscillator)为整个SCLaHS激光雷达系统中提供激光种子源,方案如图5所示。
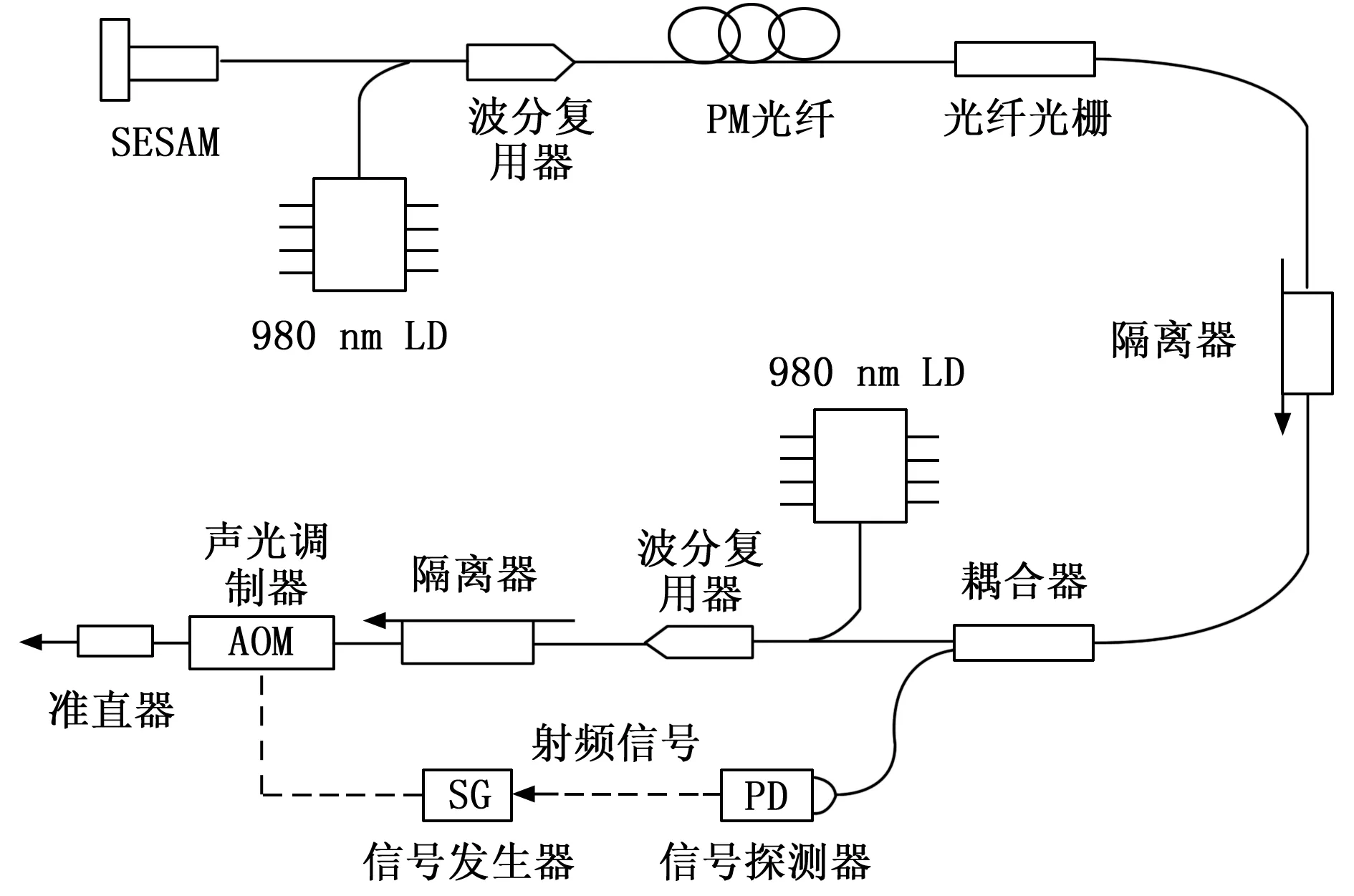
图5 通过FPLO的种子源
由于SCLaHS激光雷达系统的输出完全依赖于激光振荡器的脉冲质量、稳定性和其他特性,因此激光振荡器对于皮秒激光系统至关重要。为此,本文首先通过求解非线性薛定谔方程来设计激光腔。通过这样做,解决了光纤皮秒种子源中脉冲演化的动力学问题,并评估了功率、脉冲宽度、时间抖动、功率稳定性等参数的输出特性。因此,确定了诸如光纤长度、滤波器带宽和激光种子源中的半导体可饱和吸收体(SESAM,semi-conductor saturable absorber mirrors)调制深度等其他参数。此外,在仿真模型中引入噪声源,研究了谐振腔中各种噪声源的非线性耦合动力学。根据数值模拟的结果,适当设计激光因素,如可调皮秒激光种子源的非线性、色散和耗散,会产生非线性吸引子,这在很大程度上抑制了量子噪声的放大,有效地提高了激光器的稳定性,提高了激光种子源的信噪比。
2.2 新型3D定位算法
在本节中,本研究提出了一种基于位置域的水文地质测绘定位方法,将基于测距的GNSS定位与阴影匹配算法相结合,计算GNSS测距和阴影匹配位置解的加权平均值,可以获得综合位置解x0,其表达式为:
(1)
式(1)中,xSp和xR分别是指阴影匹配和GNSS测距位置解,WSp和WR是各自解的权重矩阵。利用GNSS测距和阴影匹配位置解各自的协方差矩阵的倒数对其进行加权,从而隐式假设其误差分布为高斯分布。首先是推导GNSS测距位置协方差矩阵,本研究使用最小二乘估计[12]从水文地质模型中提取一组伪距测量值和地形辅助高度测量值计算位置解,其表达式为:
(2)
(3)
式(3)中,p是第j颗卫星信号为直接服务水平的概率,σρ是估计的伪距误差标准偏差,σh是高度辅助测量的误差标准差。在传统的GNSS测距当量中,省略了p项和最后一行和一列。在最小二乘估计中,状态估计协方差矩阵由下式给出:
(4)
鉴于非高斯测量分布的基于协方差的加权的局限性,对于阴影匹配算法本文研究了一种确定性加权法,能使得阴影匹配在视线方向上通常更精确。因此,水文地貌边界(已用于阴影匹配)用于确定视线方位角,然后用于为视线上的阴影匹配解决方案分配较高的权重,并沿视线分配较少的权重,反之亦然,用于GNSS测距解决方案。当建筑物高度与视线宽度之比较高时,应用更大的权重[13]。
使用3D水文地质模型计算水文地貌边界,并将数据存储为包含两列的文本文件。第一列表示方位角(从北面顺时针测量),第二列表示仰角(从地面测量),在该仰角上方可以看到特定方位方向的GNSS卫星,如图6所示。

图6 水文地貌边界定义
然而在实际上,搜索区域中通常会有多条视线,因此每个候选位置都需要与特定视线关联。首先,计算每个点的视线方位角,并将具有相似方位角的点分组在一起。这将分隔具有不同方位角的视线,但不会分隔平行视线。因此,需要第二步。对于具有相似方位角的每组点,提取其中的一组视点。对于每个东距坐标,最多选择两个符合视点标准的视点,这有效地选择了落在视线中间的观点。如果两个以上的候选对象满足视点标准,则选择搜索区域内具有最高和最低北距的候选对象,提供不同视线上的视点。然后,将每个网格点关联到横穿视线方向最近的视点,有效地将其分配到特定视线[14]。关于搜索区域网格点落在两条平行视线上的情况如图7所示。

图7 候选位置与平行视线的关联
此外,GNSS测距和阴影匹配位置的权重系数在搜索区域内的每个网格点p,其沿视线方向和跨越视线方向是根据点p的水文地貌高度与视线宽度之比确定的[15-16]。要找到该比率,首先要确定沿与视线方向垂直的两个方位角上水文地貌边界最高的点,以此来找到最靠近视线方向两侧水文地貌的相邻点,这两个相邻点之间的坐标差即为视线宽度wp。然后,使用沿垂直于视线方位角的候选位置处的水文地貌边界角θ以及到该点的跨街距离△wp,则水文地貌高度h与视线宽度之比估计为:
(5)
式(5)中,δhw表示水文地貌高度与视线宽度之比。之后,可以得到p点阴影匹配的加权矩阵为:
(6)
式(6)中,Cp是从点p的坐标变换矩阵,由下式给出:
(7)
式(7)中,θ是点p所属视线的方位角。综上所述,根据3D水文地质模型每个点的阴影匹配分数来对各个点的矩阵进行加权[17-18],从而获得阴影匹配和GNSS测距位置解的总体加权矩阵。因此:
(8)
式(8)中,n是阴影匹配搜索区域中网格点的总数,Sp是点p的阴影匹配分数。
3 实验与分析
为了验证本研究设计的信息化水文地质测绘系统的实用性与可靠性,本研究通过调研当地水文地质相关政府部门,收集了关于市郊外X流域的水文地质信息并进行模拟实验,在本次实验中所选取的计算机模拟环境为:选用Windows 10作为操作系统平台,设置计算机内存为32 G,Intel Xeon W-2145 CPU 3.70 GHz,硬盘8 T,进行模拟实验,其中实验数据约为2 GB[19-20]。
关于勘探工程的布置原则,本研究采用高斯投影三度带,共加密勘测点20个,其点位中误差0.15~0.18 m,最弱边相对中误差l/30 000~l/40 000,精度符合规范要求。进入勘探以后进行了图根点加密,共加密图根点53个,其点位中误差0.05~0.96 m,精度符合规程要求。关于X流域勘测数据如表1所示。
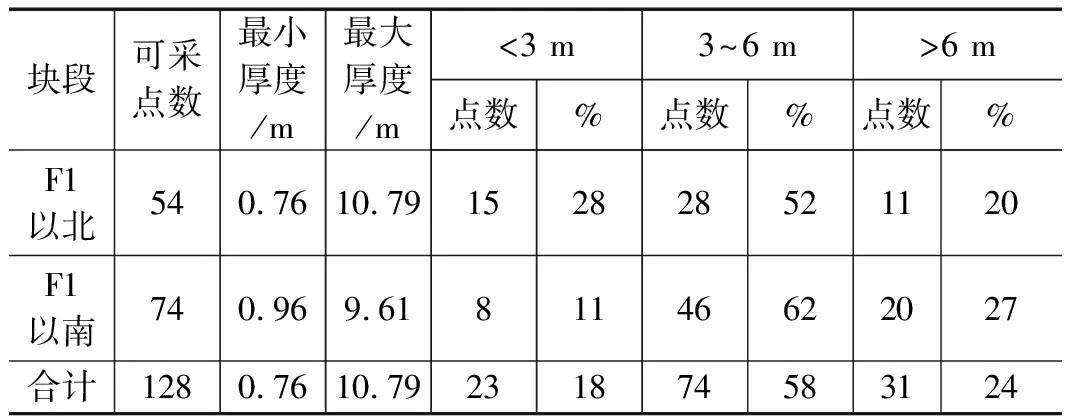
表1 水文地质测绘数据
对于X流域勘测数据的规格标准,本文做到了以下几点:采用前、后方交会等方法施测的普、详查阶段59个和勘探阶段96个钻孔坐标和高程精度均在误差范围以内,精度可靠,满足规程要求;采用经纬仪高程导线法测量施测水域和洪泛节点192个,高程中误差精度符合水文地质测绘的要求;采用经纬仪光线法施测的地质图地质点,符合规范要求;采用交会法测定的二维地震测线端点、转折点平面坐标和高程,满足规章标准的精度要求。
在本次模拟实验中通过将采集到的建筑遥感图像进行分割,并将图像输入数字高程模型中进行特征图像提取,然后将得到特征图像输入区域生成网络中,得出特征图像的候选框,利用预测器分析候选框的特征,并得出其的类别、位置以及图像掩码的预测值,之后,进行标准化后绘制3D水文地质模型,实验中其建模过程如图8所示。
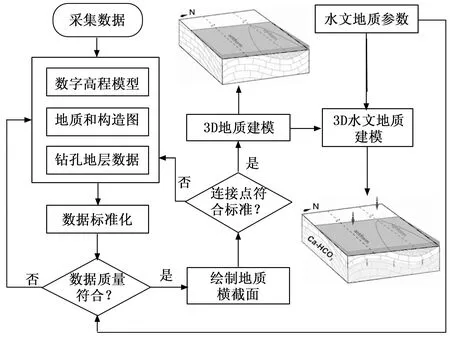
图8 3D水文地质建模实验过程
为了验证本研究设计的3D定位算法的性能,将与文献[4]、文献[5]测绘系统中所采用的定位算法进行性能比较,采用平均精度(mAP,mean average precision)作为评价指标,在本次实验进行模型训练时,采用以10张图像为一个训练批次,已知当进行20个小时的训练后,其损失函数不再下降。通过利用这3种方法对0~2 GB的水文地质图像数据进行特征提取,其定位精度结果如表2、图9所示。

表2 不同系统的定位性能对比
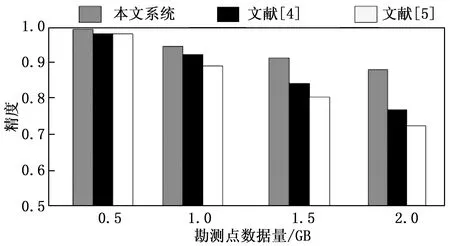
图9 不同系统的定位性能对比
通过表2中数据可以看出,本研究设计算法所获得的mAP值比其他方法高10%以上,因此本研究测绘系统中所采用的定位算法精度均远高于其他算法,这表明该算法可以有效并且准确勘测水文地貌的特定方位特征点。
4 结束语
对于水文地质测绘方法,本研究基于雷达卫星与物联网平台构建了信息化水文地质测绘系统,每隔一段时间将状态信息发送到边缘节点,每个节点中的传输模块均进行数据压缩和恢复,经处理的测绘视图在节点之间传输。此外,本研究还对SCLaHS雷达的设计进行了一项创新性研究,采用多芯微结构光纤、全保偏光纤和超长腔结构,开发了超连续谱激光源,研制了一种小型化像差校正全息凹面光栅光谱仪和条纹管技术,激光回波检测。为SCLaHS激光雷达点云数据三维大地坐标计算提供了算法理论基础,包括3D定位算法。经过实验验证,所设计的水文地质测绘系统是可行的,但在雷达信息传输上仍受到噪声干扰性强,未来会针对于信号滤波进行优化和改进工作。
猜你喜欢
大学教育(2022年3期)2022-05-16
计算技术与自动化(2022年1期)2022-04-15
特区文学·诗(2021年6期)2021-12-22
文苑(2020年11期)2020-11-19
青年文学家(2020年22期)2020-08-31
青年生活(2020年30期)2020-08-16
科学导报·学术(2019年8期)2019-09-10
金山(2017年4期)2017-06-08
数学大王·中高年级(2016年4期)2016-05-14
岷峨诗稿(2014年3期)2014-11-15