基于窄带物联网的巡检机器人目标跟踪控制系统设计
2022-04-25 11:48申丽芳
计算机测量与控制 2022年4期
申丽芳,李 莹
(沈阳工学院 信息与控制学院, 辽宁 抚顺 113122)
0 引言
巡检机器人的应用范围越来越广,它可以代替人工完成很多较为困难的、重复的工作,这些工作通常情况下具有较高的危险性、机械性,通过巡检机器人的巡检,确保巡检效果[1]。巡检机器人在机械生产线、变电站、高压变压器维修等领域中得到了广泛的应用,巡检机器人可实现对输电线路的多种故障检测,确保电网安全运行。随着对巡检机器人的不断改进和研究,目前,巡检机器人灾区救援、月球探测等领域也有非常大的应用前景,通过近距离拍摄探测区现场图像并自主分析判断,实现探测作业的高效开展。其中目标跟踪是巡检机器人的一大功能,在窄带物联网中,巡检机器人可将跟踪到的目标图像、视频等信息传送到控制系统中,以便控制系统对目标信息进行系统的分析和控制[2]。
目前的巡检机器人跟踪控制系统,系统的鲁棒性较低,跟踪误差较大,因此国内的专家学者针对巡检机器人的目标跟踪进行了相关的研究。文献[3]提出基于机器视觉的巡检机器人目标跟踪控制系统,通过设定目标搜索阈值,提高跟踪的效果和稳定性,但该系统对目标跟踪的控制效果较差、目标位置误差较高、控制系统远端呈现的目标图像不清晰。文献[4]设计了一种电力巡检机器人运动平衡滑模控制器。采用滑模控制来完成运动平衡调整工作,根据阿克曼公式设计通用的二类模糊系统来增强电力巡线机器人的抗干扰能力,实现巡检机器人目标跟踪过程的运动平衡控制,增强机器人的抗干扰性能。但是该方法的控制目标位置误差较大。
为了解决以上出现的问题,本文设计了基于窄带物联网的巡检机器人目标跟踪控制系统,窄带物联网(NB-IoT)拥有成本和功耗低,覆盖面积广等优点,通过NB-IoT无线通信技术实现巡检机器人目标采集数据的智能化传输及控制,设计了硬件和软件环境,实现了巡检机器人目标智能跟踪控制。
1 基于窄带物联网的巡检机器人目标跟踪控制系统硬件设计
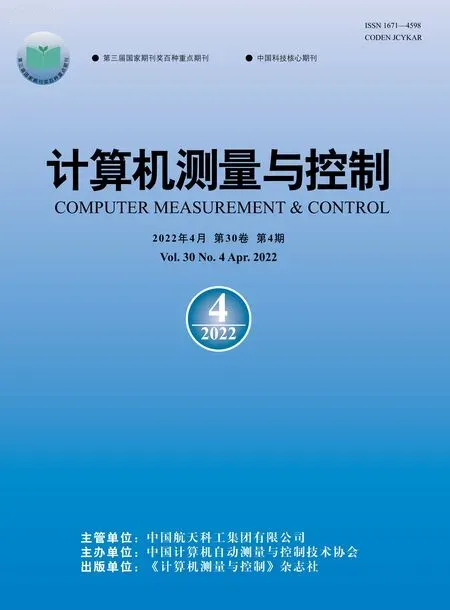
本文设计的基于窄带物联网的巡检机器人目标跟踪控制系统硬件结构如图1所示。
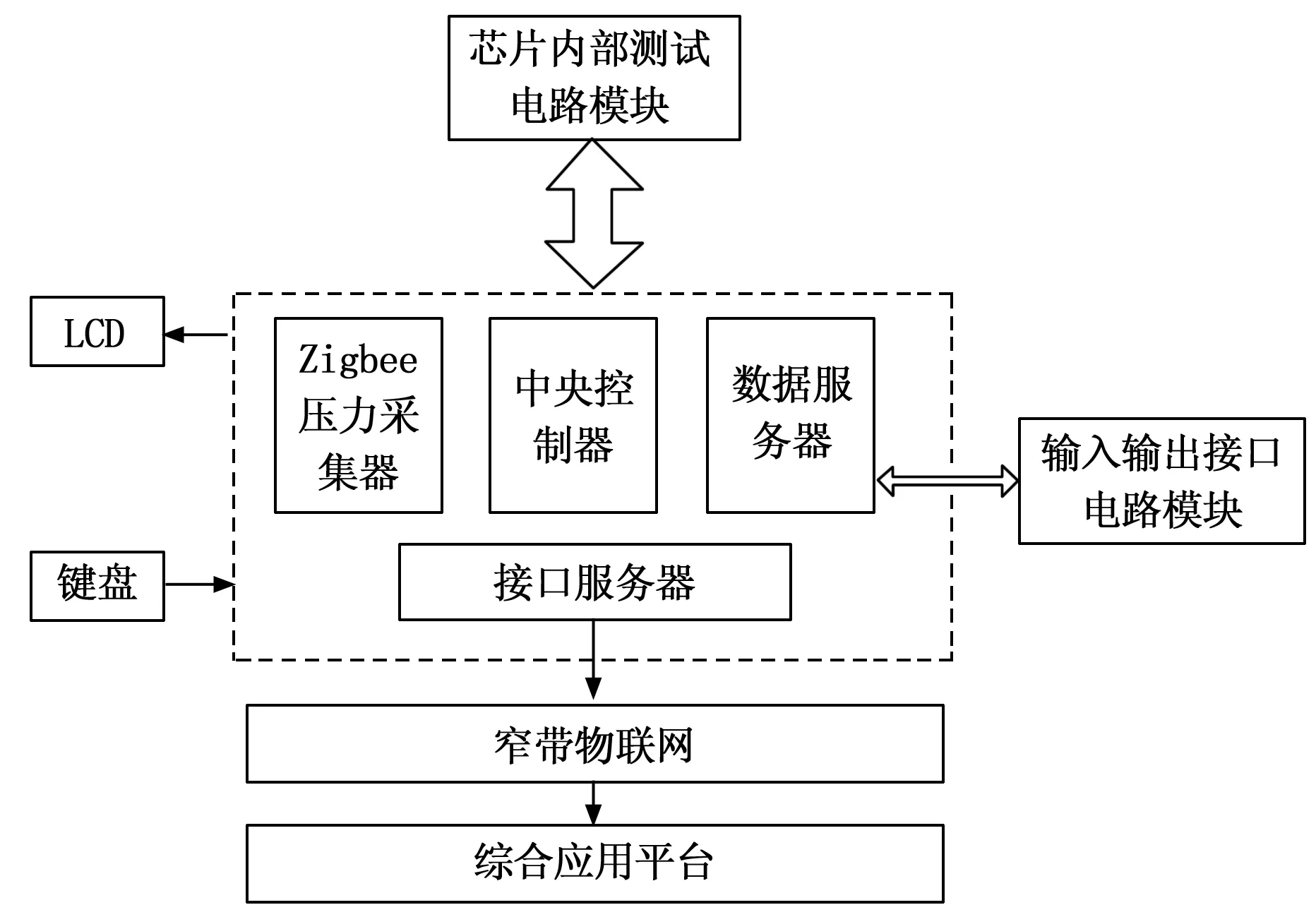
图1 基于窄带物联网的巡检机器人目标跟踪控制系统硬件结构
1.1 窄带物联网无线通信模块
巡检机器人目标跟踪控制系统窄带物联网物理层需要通过接口服务器连接到Zigbee压力采集器、跟踪控制器和数据服务器[5-6],窄带物联网物理层分为3个层次,分别对应智能控制系统的接入层,窄带物联网物理层结构如图2所示。
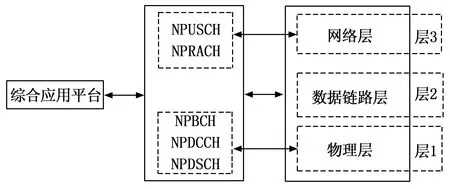
图2 窄带物联网物理层结构
通过采集器采集数据信息,整理采集信息,选取巡检机器人目标,选用 NB-IoT 无线通信技术使数据运往服务器,在窄带物联网模块实现底层信息的采集,并操纵ZigBee网络完场巡检机器人的目标跟踪和数据采集[7-9]。采用NB-IoT技术将收到的数据传送给服务器层,最终通过服务器传送给客户机。在所构造的模拟架构下,通过两种物理信道通道传输方向完成设置,NPUSCH和NPRACH在上行、设置NPBCH、NPDCCH、NPDSCH等在下行,用于模拟控制信号命令的数据传输。对巡检机器人目标跟踪控制系统的数据信息采集进行集中调度。
1.2 Zigbee压力采集器
Zigbee压力采集器通过Zigbee节点完成巡检机器人顶板压强的探测工作,并通过无线通讯协议将所测得的压力信息发送给跟踪控制器,使系统终端能够了解机器人的受力情况[10]。Zigbee压力采集器主要由XBee控制模块、压力传感器两部分组成。压力采集器结构如图3所示。

图3 压力采集器结构
采用压力范围0~60 MPa的SLM211硅压阻压力传感器。具有灵敏度强、精度高的特点。
1.3 跟踪控制器
跟踪控制器是控制系统的核心,采用低功耗的嵌入式stm32f103芯片为跟踪控制器的核心处理器,实现控制器的高性能、低成本、低消耗。在同系列芯片中具有最快的数据处理速度[11]。且自带AD转换器,最多可开放21个输入通道进行数据输入,数据转换时间低于1 μs。在控制性能方面,具有12通道DMA控制器和两个16位PWM高级控制器用于巡检机器人的紧急停止工作控制。跟踪控制器结构如图4所示。
图4 跟踪控制器结构
跟踪控制器具有512 k字节的Flash程序内存,64 k字节的SRAM,4个静态存储器,能够对待处理数据进行短暂存储,是保证控制器数据处理效率的关键。
1.4 STM32主控电路设计
1)供电电路。为满足控制系统的运行需求,采用嵌入式调压器进行电压调节,最低供电低压为2.0 V,最高供电电压为3.6 V。供电电路如图5所示。
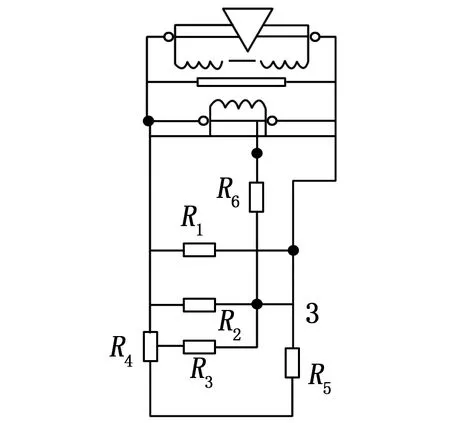
图5 供电电路图
2)晶振电路。以中控机内单片机内部的RC振荡器为基础,在实际设计中,在外部添加晶振源,配置寄存器,参考各个功能需求,完成时钟源的配置[12]。晶振电路如图6所示。
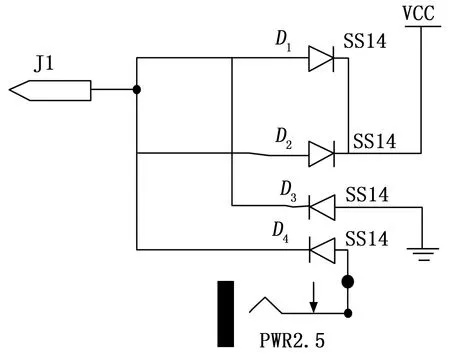
图6 晶振电路图
3)复位电路。当跟踪控制器的供电电压低于2.0 V时,由于低电量供给无法满足系统正常运行需求,跟踪控制器自动响应复位措施。考虑跟踪控制器的故障问题,此外,还设计了手动复位电路,以方便紧急情况下的紧急复位和故障恢复[13]。并在启动手动复位后,不管控制系统处于什么状态,各项设备和软件程序都将被强行恢复到初始化设置。复位电路如图7所示。
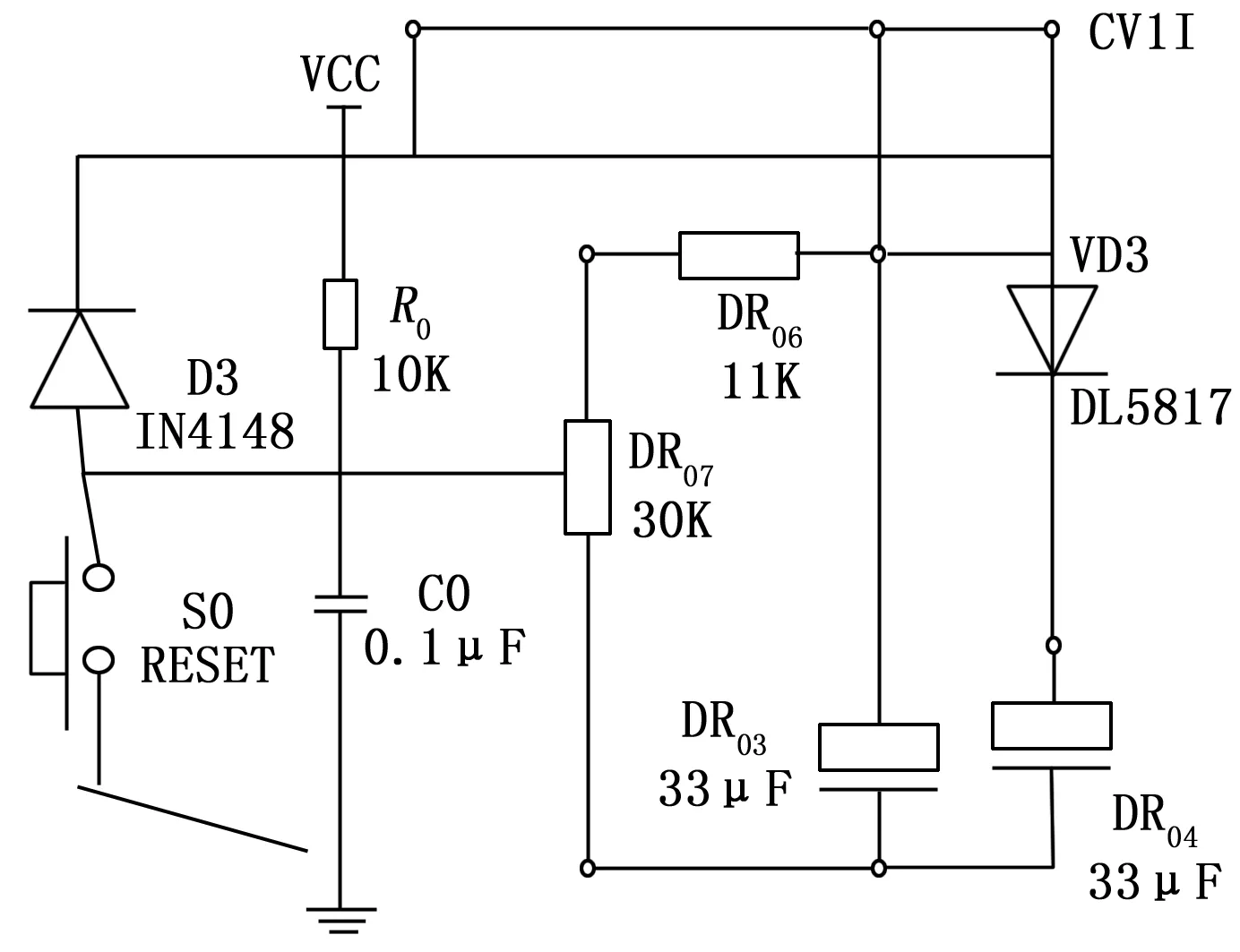
图7 复位电路图
2 巡检机器人目标跟踪控制系统软件设计
在以窄带物联网无线通信为基础的系统硬件模块设计上,设计巡检机器人目标跟踪控制系统软件流程。主要设计内容包括Zigee组网、目标跟踪视觉处理以及巡检机器人目标跟踪自主导航等三部分,分别实现巡检机器人的通信功能、目标跟踪视觉处理功能和目标跟踪自主导航功能。
2.1 Zigee组网程序
考虑巡检机器人的应用领域,针对复杂环境下的目标跟踪,由于简单的4G网络通信受到网络覆盖面的限制,在无网络情况下可能导致通信中断,使得控制系统无法获取巡检机器人的实时工作数据[14]。为保证通讯的稳定性,应用Zigee进行通讯,Zigee具备自组网,采用无线mesh进行通讯不受网络限制,且针对Zigee组网故障具有较强的自愈合能力。Zigee组网以控制系统的终端接收设备为节点,巡检机器人为路由器,跟踪控制器为协调器,当巡检机器人追踪目标到某一位置时,其附近终端节点形成自组网,保持动态组网模式,维护通讯的畅通[15]。Zigee组网程序工作流程如图8所示。

图8 Zigee组网程序工作流程
2.2 目标跟踪视觉处理程序
巡检机器人的视觉库包含在一个Python程序中,可根据目标跟踪需求嵌入特征识别、滤波、模式检测等多种高级算法,扩展巡检机器人的视觉处理功能[16-18]。嵌入式处理程序工作流程如图9所示。
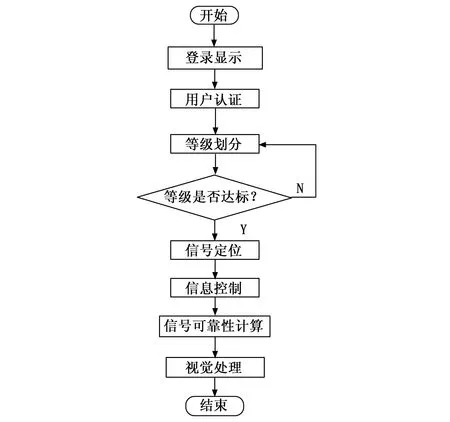
图9 嵌入式视觉处理程序
巡检机器人内设SimpleCV开源视觉框架,完善自身的视觉架构。巡检机器人通过分色计算各通道非饱和像素的HSV值,能够准确辨认视觉范围内景象的颜色,在Python编程的运行下,通过编写物体识别程序,能够使巡检机器人识别路况信息,并选择最优追踪路径进行目标追踪,通过对比视觉架构中的视觉信息,能够识别基础障碍物,是保证机器人持续追踪的基础[19-20]。
2.3 巡检机器人目标跟踪自主导航程序
巡检机器人的自主导航以激光雷达传感器的数据采集为基础,通过传感器的360°旋转扫描和测距,引用SDK开发包,计算出目标定位模型的输出测量,并根据相关比例,绘制目标追踪路径,完善地图绘制,且为便于巡检机器人本身功能的扩展,控制系统支持Linux等嵌入式系统的移植,且在控制系统的控制下,巡检机器人的视觉能够快速扫描周围20 m范围的事物,提升了云点数据的构建速度,根据云计算分析,得到目标的移动路径,并快速响应追踪模块,实现巡检机器人的自主导航。
3 实验研究
为了验证本文设计的基于窄带物联网的巡检机器人目标跟踪控制系统的实际工作效果,将基于机器视觉的巡检机器人目标跟踪控制系统与本文系统进行对比实验。
3.1 实验条件及方法
实验中,将两种控制系统搭载在巡检机器人样机上进行实验,实验需要对比两种控制系统的目标位置误差、控制效果以及目标图像的清晰度。实验参数设置如下:高清摄像机的分辨率为320×180 pixel,帧率:25 f/s,窄带物联网的频率:2.4 GHz,带宽20 Mb/s,覆盖范围≧200 m,为了保证实验结果的有效性和严谨性,两个巡检机器人的外形和内部配置均相同。
基于以上设置的实验参数,在窄带物联网环境中,巡检机器人需要对目标路线进行自动巡检,当控制系统远端发生了紧急事件时,根据控制流程,两种控制系统的巡检机器人同时向目标以相同速度运动,跟踪轨迹由两个巡检机器人自行进行规划,跟踪过程中统计两个巡检机器人的跟踪情况并观察其运动状态。为了更准确地对比出两种控制系统的目标位置误差,针对目标位置误差对比实验,需要进行两次的目标跟踪运动,第一次将两个巡检机器人放在相同的位置上,使两个巡检机器人按照相同的跟踪轨迹进行跟踪运动,跟踪运动完成后,统计两个巡检机器人的目标位置误差。第二次对比试验中,将两个巡检机器人同样放在相同的目标位置上,使其按照不同的跟踪轨迹进行跟踪运动,运动过程中两个机器人通过窄带物联网会得到属于自己的轨迹信息,按照各自的轨迹完成跟踪运动,跟踪运动完成后,统计两个巡检机器人的目标位置误差及控制效果。
3.2 实验结果分析
首先对比两种控制系统的目标位置误差。两次对比实验结果如图10所示。

图10 跟踪实验结果
通过对实验结果进行分析可知,在第一次跟踪运动中,本文系统的巡检机器人按照自己的轨迹跟踪后,目标跟踪曲线与实际路线相差值较小,在第二次跟踪运动中,本文系统的巡检机器人的目标跟踪曲线与实际路线相差值较第一次有所上升,但整体的目标位置误差较低,两次实验的跟踪误差平均值为0.2 m,基于机器视觉的巡检机器人目标跟踪控制系统的巡检机器人在第一、第二次跟踪运动中,目标跟踪曲线与实际路线相差值均较高,两次实验的跟踪误差平均值为1.3 m。
基于以上得到的目标误差对比结果,检验两种系统的控制效果,如图11所示。
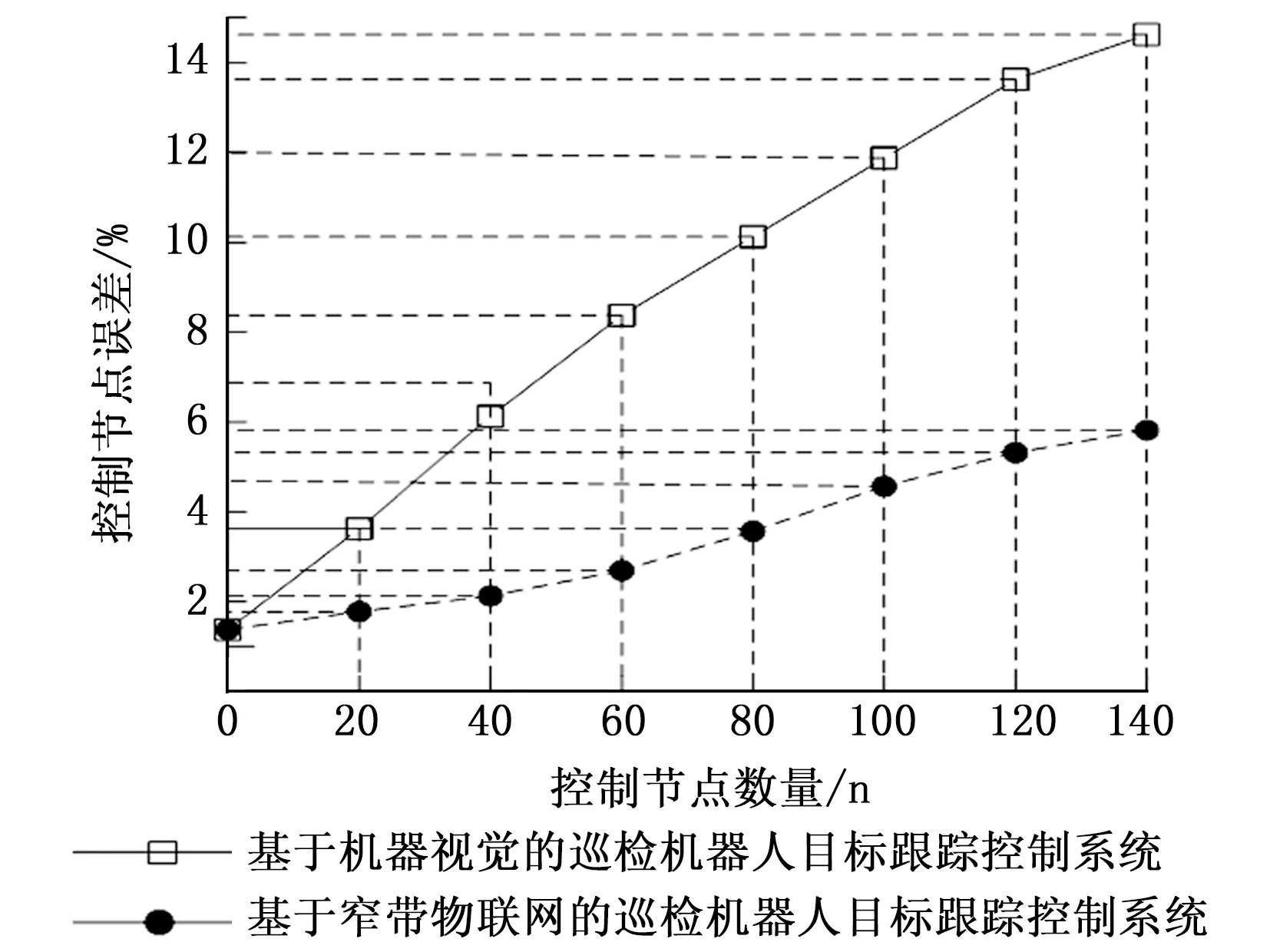
图11 控制误差实验结果
分析图11可知,在控制节点数量为140时,基于窄带物联网的机器人目标跟踪控制系统控制节点误差为5.9%基于机器视觉的巡检机器人目标跟踪控制系统控制节点误差为14.8%,而基于机器视觉的巡检机器人目标跟踪控制系统的巡检机器人在跟踪快速移动的目标时,目标运动速度过快导致巡检机器人没有跟上目标,而本文系统的巡检机器人在跟踪相同移动速度的目标时,由于控制系统中设置了跟踪控制器,提前对目标的运动速度进行了控制,因此本文系统的巡检机器人没有将目标跟丢,由此可验证,本文系统对巡检机器人的跟踪控制效果要优于基于机器视觉的巡检机器人目标跟踪控制系统的控制效果,本文系统可以有效的跟踪目标,实现快速跟踪。
综上所述,通过对比实验可验证,本文设计的基于窄带物联网的巡检机器人目标跟踪控制系统优于基于机器视觉的巡检机器人目标跟踪控制系统,本文系统具有较低的目标位置误差、较好的跟踪控制效果,具有更高的应用价值。
4 结束语
针对巡检机器人的目标追踪控制难度大等问题,本文设计了一种基于窄带物联网的巡检机器人目标跟踪控制系统,采用Zigee压力采集器进行实时数据采集,获取巡检机器人的受力情况,利用跟踪控制器完成系统的核心控制操作,并设计多种电路为系统的运行提供电源保证。在软件设计方面,利用Zigee组网实现高稳定性的系统通信,同时引用嵌入式视觉处理技术和自主导航技术,进一步提升巡检机器人的综合性能,促进巡检机器人目标跟踪控制技术进一步发展的同时,扩大了窄带物联网的应用领域,并为其他机器人的控制提供了借鉴。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
振动工程学报(2019年2期)2019-05-13
网络空间安全(2019年8期)2019-03-18
农家科技下旬刊(2017年5期)2017-06-20
中小企业管理与科技·中旬刊(2016年5期)2016-06-04
科技传播(2012年10期)2012-06-06