
基于AHP-FKANO 模糊分析法的医用消毒机器人设计评估
2022-04-25 07:16史蕊丹石元伍周俊杰曹洁
包装工程 2022年8期
史蕊丹,石元伍,周俊杰,曹洁
(湖北工业大学,武汉 430068)
医院是集合了患者、家属和医务工作者等人员的密集场所,其具有人流量大、人员复杂等特点,极易造成各种病原体传播的风险,严重威胁到医院内人员的安全。医院感染不仅是医疗质量管理中的一个非常重要的问题,而且已成为日趋突出的世界公共卫生问题。根据相关研究表明,全球每年有数以亿计的患者在接受医疗服务时发生感染而导致病情加重,更有甚者还会危及生命,并且由于患者的住院时间延长,将带来患者的诊疗费用增加、医务人员的工作量加重等一系列后果[1]。2019 年国内爆发了新型冠状病毒肺炎(COVID-19),它是由新型冠状病毒(SARS-CoV-2)引起的急性呼吸道传染病[2],传染性强且人群普遍易感。2020 年9 月24 日,青岛市某医院隔离观察期间有人离开封闭区进入CT 室进行检查,由于防护、消毒工作不规范,引发了院内外一系列感染问题,所以医院环境质量和医院内人员健康安全又一次引起了大家的高度重视。
医用消毒产品能有效预防和控制医院感染,为用户提供一个更加健康、宜人的医院环境。随着科技的发展,现阶段计算机技术和人工智能已经渗透到医疗领域的方方面面[3]。相比于传统消毒产品及人工消毒,医用消毒机器人具有消毒更彻底,以及高效、安全、灵敏等特点,因此越来越受到大家的关注。目前市面上的医用消毒机器人多重视功能的实现,忽视了用户的情感需求,造型同质化严重,导致用户体验感不佳。产品始终是为人服务,因此产品的研发和规划需要以满足用户需求为核心基础,以提高用户满意度为目标[4]。笔者通过AHP 与FKANO 组合赋权,综合考虑用户需求优先级和偏好,得到更加科学、合理的综合权重[5],根据模糊数学理论对整体方案和各个指标分别进行评价,使产品设计评价更加合理、客观。
1 医用消毒机器人概述
医用消毒机器人由微电脑控制,可实现实时实地监测医院环境质量并做出反馈,能有效降低医院感染率。产品主要分为感知监测模块、控制操作模块、移动模块、消毒净化模块。
1)感知监测模块。机器人通过安装的测距传感器、红外线传感器、VOC 传感器、激光粉尘传感器等各类传感器来获取室内空气质量、自身的位置等基本信息,例如高精度传感器检测PM 2.5、甲醛、甲苯、温度及湿度等多项指标,并通过监测指示灯的颜色变化来显示实时、实地的环境质量。
2)控制操作模块。微电脑通过对各种信息进行分析处理,并结合产品的功能按键和APP 远程操作2种模式,来完成对产品功能的实现。
3)移动模块。不同算法和类别的导航,其灵敏度和路线规划的智能程度有很大区别,常见的导航方式按照灵敏度从大到小依次为dToF(时间飞行测距)>激光导航>视觉导航,3D 结构光的物体识别避障效果远高于红外传感器,消毒净化模块细分为消毒与净化2 个子模块。
4)消毒方式主要分为物理消毒和化学消毒两大类,笔者以物理消毒方式——紫外线灯进行消毒为例,净化模块依据不同科室的位置和环境,来设置不同的净化功能模块。产品主要工作流程见图1。

图1 产品主要工作流程Fig.1 Main work flow chart of the product
1.1 用户需求分析
用户需求的获取是产品设计的关键和前提,因此获取产品需求信息时,一般要遵循全面性、深入性、广泛性、突出性和建议性5 个原则[6]。首先通过前期调研确定初始指标,其次通过公信度评测将值低于0.5 的指标进行剔除,最终构建出医用消毒机器人的设计方案评价指标体系。
1.1.1 初始评价指标
通过对医用消毒产品的特征市场进行调研,并查阅相关文献资料,在医院采用实地观察法对目标进行一段时间的调研,同时也对医院工作人员、患者和家属进行半结构化访谈,并对专家和用户进行问卷调查。通过有针对性地制订调研问卷可以发现,用户对医用消毒机器人的需求主要集中在以下几个方面:智能监测及反馈功能,产品内置感应器,可以实时、实地智能监测当前环境质量并快速做出反馈;消毒净化功能结构模块,产品主要通过紫外线灯进行消毒,紫外线不能直接与用户接触,在实现产品功能结构时,需要考虑安全性;操作界面设计,由于产品具有特殊性,所以需要由专业人员进行操作,APP 界面风格简约符合医院的环境定位,可以使专业人员操作更加高效;考虑到产品在白天也会工作,因此噪音要小,以提供宜人的医院环境;产品造型简洁、大方,色彩干净、柔和。
共收集23 个初始指标,并将安全性、舒适性、便利性指标作为医用消毒机器人设计评价指标体系的一级指标。
1.1.2 最终评价指标
选用公信度评测方法对指标进行筛选[7]。邀请专家团队120 人,包括医护人员、病患、家属、医院采购人员、技术人员及设计师。通过问卷形式,让专家团队从23 个初始评价指标中选择对产品本身有重要影响的评价指标,共发出110 份问卷,去掉3 份不合理的问卷,得到107 份有效问卷。指标公信度公式如下:

式(1)中,H为指标公信度;G为选择该指标的专家人数;N为有效问卷的数量。剔除H值低于0.5 的指标,最后得到9 个子准则层指标,分别为结构合理A1、技术成熟A2、专人操作A3、造型美观B1、色彩柔和B2、低噪音B3、实时监测C1、及时反馈C2和交互界面C3,见表1。

表1 医用消毒机器人设计方案评价指标体系Tab.1 Evaluation index system for design scheme of medical disinfection robot
2 基于AHP-FKANO的模糊评价法设计思路
评价设计思路分为2 个阶段,即用户需求分析阶段和设计评价阶段。需求分析阶段:首先通过层次分析法对需求进行分阶判断、权重计算、一致性检验等。FKANO 通过对用户需求进行模糊卡诺问卷,根据卡诺评估表进行评估,得到模糊KANO 调查结果表,对用户需求属性进行分类,并确定属性系数。最后用FKANO 得到的属性系数来修正层次分析法获得的初始权重,从而得到综合权重。设计评价阶段:专家根据评价集对产品指标进行打分,并构建模糊关系矩阵,各评价指标综合权重和对应评价指标的模糊关系矩阵通过合成运算,进而得到综合评价结果向量。基于AHP-FKANO 的模糊评价法设计思路见图2。

图2 基于AHP-FKANO 的模糊评价法设计思路Fig.2 Design idea of fuzzy evaluation based on AHP-FKANO
2.1 模糊综合评价法
模糊综合评价法是一种基于模糊数学的综合评价法,能有效减少评价主体的主观因素和不确定信息对决策过程的影响,使评价过程更加客观、合理[8-9],因此常用来解决多属性评价与决策中的指标权重问题。具体评价过程如下。
1)确定评价指标集P= {p1,p2,… ,pm}。
2)确定评语等级评价集V= {v1,v2,… ,vn},评价等级一般为很满意、满意、一般、不满意、很不满意。
3)建立模糊关系矩阵:

4)确定各评价指标的权向量:W= (w1,w2, …,wm)。
5)合成模糊综合评价结果向量:
2.2 权重的确定
2.2.1 层次分析法确定初始权重的方法
层次分析法是由美国运筹学专家Saaty 在1970年提出的一种解决多目标复杂问题的决策方法。它是将与决策有关的指标分成目标层、准则层、子准层等,然后进行定性与定量相结合的分析决策[10]。采用1—9 标度法(见表2),对评价体系中各评价指标进行两两比较,以此构建判断矩阵,然后把判断矩阵的最大特征向量的分量作为相应的系数,最后计算出准则层和各子准则层评价指标所对应的权重。AHP 法计算权重共有4 种方法[11]:特征向量法、最小二乘法、几何平均法、算术平均法。以下选择常用的算术平均法,具体步骤如下所述。
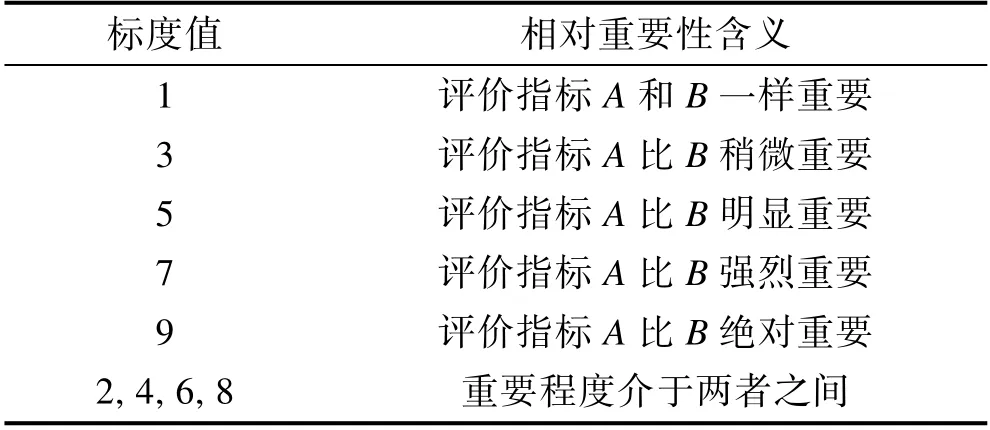
表2 元素相对重要性的比例标度Tab.2 Scale of relative importance of elements
1)对判断矩阵每列元素做归一化处理:

式中:i,j= 1,2,… ,n。
2)按行相加归一化后的判断矩阵:

3)将相加得到的向量归一化处理,即为近似特征根:

4)进行一致性检验:

式中:CR为判断矩阵的一致性指标;λmax为最大特征值;n为判断矩阵阶数。

式中:CR为判断矩阵的一致性比率;RI为随机一致性指标;
当CR<0.1 时,即认为判断矩阵具有满意的一致性,否则就要重新调整矩阵。1—9 阶RI值见表3。

表3 1—9 阶判断矩阵RI 值Tab.3 RI value of judgment matrix of order 1-9
2.2.2 FKANO 确定的调整系数
模糊卡诺是针对传统KANO 模型对用户需求满意度具有的模糊性特点而提出来的。传统Kano 模型只允许顾客选择一个最满意的答案,见表4。模糊Kano 调研允许顾客对不止一个选项给予满意度数值,用区间[0,1]内的某个模糊满意度值,来表示用户对产品各指标的满意度[6],每行数值和为1,从而使顾客的需求分类调查更加准确,见表5。KANO 模型将用户需求分为5 类:兴奋型需求A、期望型需求O、无差异型需求I、反向型需求R、必备需求M[12]。具体步骤:采用模糊卡诺问卷调查表进行调研;根据Kano 评估表,使用频数最大法确定评价指标所属类别,见表6;确定顾客满意程度的属性系数λj(j=1,2, …,m)。λj值由评审专家依据经验来选取[8,13],卡诺类别A、O、M、I 对应的属性系数λj值分别取3、2、1、0。

表4 传统卡诺问卷调查Tab.4 Traditional Kano questionnaire

表5 模糊卡诺问卷调查Tab.5 Fuzzy Kano questionnaire

表6 Kano 评估Tab.6 Kano assessment
2.2.3 综合权重确定的方法
层次分析法得到的初始权重为wj,模糊KANO得到权重调整系数为λj,可以得出各个评判指标的最终权重wajdj如下:

3 实例验证
3.1 评价对象
根据前期调研结果,并将已有的计算机技术和人工智能结合到具体设计方案中,根据安全性A、舒适性B、便利性C等3 种设计要素对医用消毒机器人进行分析设计,见图3—5。

图3 产品工作场景Fig.3 Product work scenario diagram
1)安全性A。产品侧面进风,上端出风;产品中部侧面设有红色紧急开关按钮,并且手机APP 操作有权限设置;通过按压可以打开滤网模块控制板,方便后期维护;智能监测模块通过高精度传感器可以灵敏检测PM2.5、甲醛、甲苯、温度及湿度等多项指标,并通过监测指示灯颜色变化可以显示实时实地的环境质量;升级版的dToF 模组激光扫描的建图速度更快,且不再需要激光发射孔和接收孔,还能做成全封闭式的,可以防止落灰引起的硬件故障,产品底部侧面的前部是3D 结构光传感器模组,可以精确感知前方物体形态数据,实时、精准避障,使建图和避障的可靠性更高;出风口下的弹性保护外壳在微电脑控制下可以伸缩,有人时,紫外线灯不裸露,只对空气进行消毒,无人时,紫外线灯可以裸露并且能在智能系统控制下旋转90°,对物体表面和空气都能进行全面、彻底的消毒;根据医院不同科室位置、环境的不同,设置5 种净化功能模块,分别为HEPA 模块、活性碳模块、ACF 模块、光催化模块及负离子模块,模块化的设计可以方便专业人员进行更换;考虑到产品的使用环境,以及服务的用户的特殊性,专业工作人员可以通过APP 实时实地查看,使操作更加高效、安全。产品所使用的传感技术、智能控制技术、路径规划技术、计算机技术及对应的传感器、控制器等已广泛应用于各种高端、智能产品,例如人脸识别手机、无人驾驶汽车、扫地机器人等。

图5 医用消毒机器人APP 界面(部分)Fig.5 APP interface of the medical disinfection robot (partial)
2)舒适性B。产品的外观造型以简单圆柱体为主,无多余装饰,整体流畅、平滑、简约;产品主体采用白色ABS 塑料,局部搭配黑色、银色和红色,保护外壳为弹性复合PVC 材质,轮子为黑色ABS+聚氨酯橡胶,产品整体与服务的环境和用户有较好的融合,给人以专业、安全、信赖的感觉[14];产品的消毒、净化工作主要分为主动和被动2 种,该产品采用被动式,即通过风机将产品周围空气吸入产品内部进行过滤、净化、消毒后排出,产品主要的噪音来自产品内部的风机,安装低分贝的风机,能有效降低噪音。
3)便利性C。高精度传感器可以实时实地监测环境质量,拥有产品顶部监测指示灯颜色变化和手机APP 显示2 种反馈形式;产品APP 界面分为首页、预约、监测和我的4 个一级页面,界面风格高效、简约,颜色以蓝色和白色为主,整体设计符合医院环境,一级监测页面有实时监测和全部数据2 个页面,可以方便专业人员查看医院整体和医院具体位置的空气质量,二级监测页面的日期模块采用折叠设计,可以便于专业人员进行查看及操作,数据信息通过可视化表现,能帮助专业人员实时实地更高效地监测、分析医院环境,并作出反馈。
3.2 层次分析法确定设计方案评价指标初始权重
邀请25 名专家,并运用1—9 标度法对图3—5的医用消毒机器人的产品评价体系中的各评价指标进行两两比较,从而构造判断矩阵,并依据式(4)—(9)进行计算,得到安全性、舒适性、便利性权重,并对其一致性进行检验,见表7。

表7 准则层指标权重及一致性检验Tab.7 Index weight and consistency test of criterion layer
根据表7 可知,一级评价指标对应的判断矩阵的CR 值小于0.1,一致性检验通过。同理计算出子准则层的权重并进行一致性检验,见表8。

表8 子准则层指标权重及一致性检验Tab.8 Index weight and consistency test of sub criteria layer
3.3 FKANO 确定属性系数
针对用户情感偏好,采用FKANO 模型进行需求分类。邀请120 名专家,通过发放FKANO 问卷来获取实验数据,去掉3 份不合理问卷和2 份空白问卷,得到有效问卷115 份。对结果进行统计分析,见表9。

表9 模糊Kano 调查结果Tab.9 Fuzzy Kano survey result
由表9 的统计结果可得出,必备需求M 包括:结构合理A1、专人操作A3、实时监测C1和技术成熟A2。期望型需求O 包括:色彩柔和B2、及时反馈C2和交互界面C3。兴奋型需求A 包括:造型美观B1、低噪音B3。
3.4 综合权重确定
将层次分析法得到的初始权重和FKANO 得到的属性系数代入式(10)求得综合权重,见表10。

表10 各指标权重调整Tab.10 Weight adjustment for each indicator
3.5 方案模糊综合评价
依据李克特量表5 分制量化各个指标的用户满意度[15],V={很满意,满意,一般,不满意,很不满意}={5,4,3,2,1},邀请专家分别对每个指标进行等级打分,数据归一化处理后评价结果如下。
安全性综合评价变换矩阵:

舒适性综合评价变换矩阵:

便利性综合评价变换矩阵:

通过式(3),可得出安全性评价向量:

舒适性评价向量:
便利性评价向量:

由此可构造出总体指标模糊综合评价矩阵:

该款医疗消毒机器人的最终评价向量:

结果表明,40.528 1%的评估者对该方案整体评价很满意,34.809 9%的评估者对该方案整体评价满意,13.908 8%的评估者对该方案整体评价一般,8.296 2%的评估者对该方案整体评价不满意,2.457 1%的评估者对该方案整体评价很不满意,按照最大隶属度原则,这款医用消毒机器人的综合评级结果为很满意,验证了该方案具有一定的科学合理性。
为了更直观地看到用户对不同指标的满意度,并对设计方案做进一步分析和改进,将各向量根据评价等级分数表,算出各评价因素的具体评价值见表11。

表11 各指标权重评分值Tab.11 Weight value of each index
根据表11 各指标评价值可知,一级指标安全性A的评价值为4.046 25,舒适性B的评价值为4.015 858,便利性C的评价值为3.966 461,用户对产品方案安全性和舒适性比较满意。对二级指标层评分发现,结构合理A1、色彩柔和B2这2 个指标用户满意度较好,而技术成熟A2、低噪音B3、实时监测C1分值为4,表明这3 个方面的设计基本符合用户的要求。其他指标的分值处于一般等级,且分值都接近4,说明这些指标可以通过进一步分析来改进,从而得到更高的用户满意度。
4 结语
在医用消毒机器人设计中,由于该产品服务的环境和用户具有特殊性及复杂性,所以需要采用更加客观、科学、可量化的方法来进行评估。文中通过层次分析法来确定各指标权重,带有主观性且未能准确反映用户真实需求的不足,引入模糊卡诺法对其进行修正,可以帮助决策者更加科学、准确地对设计方案进行评价。基于AHP-FKANO 模糊分析法对产品设计方案进行综合性和细致化的评价,能够直观地分析出用户需求优先程度和不同需求的情感偏好,方便后续有针对性地结合技术来深入改进产品,从而提高用户满意度,并提升产品市场竞争力。后续笔者将从2 个维度进行深入分析:时间维度,为了延长产品生命周期需要考虑动态变化的用户需求,并结合大数据和深度学习,以得到需求变化轨迹,从而为后续优化产品设计提供数据参考;空间维度,分析不同地区的用户需求和偏好的差异,并结合地区经济、环境等特征要素,分析差异的根源,更加全面、客观地了解用户需求和偏好。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
心理学报(2022年5期)2022-05-16
中国典型病例大全(2022年13期)2022-05-10
中国典型病例大全(2022年9期)2022-04-19
当代陕西(2020年17期)2020-10-28
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
读与写·教育教学版(2017年10期)2017-11-10
小天使·六年级语数英综合(2017年3期)2017-04-25
南都周刊(2015年4期)2015-09-10
