
人行道上超声波清除压实冰雪机器人的设计与研究
2022-04-25 07:16张恩惠李双
包装工程 2022年8期
张恩惠,李双
(东北林业大学,哈尔滨 150036)
冬季降雪较多,并普遍以浮雪、积雪等形式停留在路面。四季无雨时路面的阻碍因数为0.6,雨季路面的阻碍因数小于0.4,在冬天降雪路面为0.28,结冰路面仅为0.18,人行道阻碍因数的减小导致行人、自行车和电动车侧滑的概率增加,容易造成人身伤害[1-2]。世界各国对清除路面冰雪极为重视,针对道路中央大面积冰雪清除的方法繁多,分别以接触式和非接触式压实冰雪2 个方向进行,涉及机械清除、热力清除和改良路面铺装材料清除等方式[3-4]。目前,针对面积小、路况比较复杂的人行道压实冰雪清除装置的研究较少,通常采用人工铁铲清除的方式进行处理,存在耗费人力,财力、时间,以及成效低和会破坏人行道路面等问题。超声波除冰也称机械除冰,具有结构简单、耗能低、费用低、不破坏路面等优势,因此越来越多的研究者开始专注于这种方法。例如,JING 等[5]研究了超声波除冰技术,为飞机、风力涡轮机设计了几种超声波除冰或防冰系统。现阶段超声波除冰机理的研究还不是很全面,在大多数研究中,除冰准则被认为是一个静值,如果压实冰雪界面横向剪应力幅值超过了通过静态张力测试确定的黏着强度,证明超声波除冰系统是可以实现的。随着人工智能技术的发展,机器人的使用遍布各个领域,在机器人的基础上安装具有小型化、机动灵活、能效小、效率高、节省人力等特性的除冰装置,成为当今除冰装置的应用趋势[6-7]。针对人行道除冰现状,现阶段应以小型、机动灵活、经济耐用的作业机械为研究重点。
针对人行道压实冰雪路况,提出一种小型、机动、灵活的超声波清除压实冰雪机器人的布局方案,超声波清除压实冰雪机器人主要由行驶机构、超声波破冰机构、除冰雪机构、动力系统和控制系统组成,该装置可以通过语音的方式控制超声波清除压实冰雪机器人沿人行道作业,利用超声波高频振动破碎、清除人行道的压实冰雪,从而保障行人的安全。
1 压实冰雪路况情况
人行道大多数由水泥方砖铺成,附加设施内容多,包括树池、垃圾桶、无障碍坡道等公益性设施、公共服务设施和广告设施。清除人行道上的压实冰雪比较困难,障碍物比较多,清除压实冰雪的装置应灵活、小巧,从而便于清除压实冰雪。冬季降雪后,为避免方砖、两侧绿化带不受盐及融雪剂的危害,人行道一般不使用融雪剂来清除冰雪。人行道中的积雪因时间、温差、人为来回踩踏等形成了黏附力很强的压实冰雪,人行道压实冰雪一般有散漫、板状等形状。其中,板状的压实冰雪和冰膜是最难清除也是危险系数最大的一类压实冰雪。被行人来回踩踏过的积雪分布匀称、坚固,密度为900 kg/m3,黏附力极强,冰膜为半透明和不透明混合的板状物,压实冰雪融化后因温度过低又冻结在一起,黏着力很强[8]。特别是在温度极低的东北地区,人行道的压实冰雪非常多,在这种路面上行走或骑自行车很容易侧滑,容易造成人身伤害。
2 超声波清除压实冰雪机器人系统研究设计
人行道路比较窄,工作环境比较复杂,因此人行道路清除压实冰雪机器人必须满足以下功能:分辨方位、转向、爬斜坡、刹车等。具有防滑功能的超声波振动破冰刀具,能清除压实冰雪,是一种小型、灵活的超声波清除压实冰雪机器人[9-10]。超声波清除压实冰雪机器人由本体机构、行驶机构、超声波破冰机构、除冰雪机构和动力系统等组成,见图1。机器人通过无线通信的方式控制行走机构进行移动,在移动的同时超声波破冰机构由单片机控制升降系统下降到压实冰雪的路面,超声波发生器与电源连接发射出的电振荡信号传递到超声波换能器中,超声波换能器能将高频电能转换成机械能,机械能产生高频振动对人行道路压实冰雪进行破碎,单片机控制丝杠升降系统将推冰雪铲下降至破碎的压实冰雪路面,推冰雪铲把破碎的压实冰推至路边的林木里,既清除了人行道的冰雪又为林木提供了水分。

图1 人行道超声波清除压实冰雪机器人Fig.1 Robot for removing and compacting ice and snow on sidewalk by ultrasonic
动力系统采用发电机与发动机相结合的方式来驱动整个机器人的移动和各个机构的作业。该机器人通过发电机与发动机自带的电频来驱动升降系统进行工作,为超声波发生器提供电源,使超声波发生器发射高频电振荡信号,并通过超声波换能器转换为高频振动,由超声波变幅杆放大来驱使破冰刀对压实冰雪实施破碎,从而达到最佳的破碎效果。人行道上超声波清除压实冰雪机器人的主要技术参数,见表1。

表1 主要技术参数Tab. 1 Main technical parameters
2.1 行驶机构设计
超声波清除压实冰雪机器人的发动机为整车行驶机构及作业机构提供了能源和动力,其位于本体机构的后端,采用机械传动的方式传递动力,可以使整个机器人获得速度、牵引力,并实现停车。行驶机构是超声波除冰机器人行进的驱动装置,必须保证机器人能在压实冰雪的人行道路上平稳、快速地前进。由于人行道路偏窄、不平稳,所以应用车轮式原理使机器人移动,见图2。行走机构包括车架、车轮车架接头、车轮、车轴、连接板和万向轮。用带轮连接发动机与后车轮的车轴来驱使整个机器人前进,前车轮采用万向轮的方式,从而使机器人可以左右转弯。后车轮设有15 个呈圆周排列的防滑卡座,防滑卡座采用摩擦能力强的材料(16 Mn),以确保机器人拥有极强的防滑能力,见图3。

图2 行驶机构Fig.2 Travel mechanism

图3 行走轮Fig.3 Walking wheel
2.2 超声波破冰机构设计
超声波破冰机构设计是清除压实冰雪机器人最关键的作业部分,也是主要的核心部分,决定了机器人的破冰速度和破冰效果。超声波破冰机构包括升降系统、超声波破冰系统和超声波固定架,见图4。升降系统包括丝杠电机、丝杠、支撑座、丝杠螺母、滑块和导轨,见图5。升降电机与丝杠用联轴器连接,丝杠通过支撑座固定在本体机构上,把超声波破冰系统固定架上的连接杆设计为丝杠螺母,从而实现超声波破冰系统的上下往复运动,连接杆两端的固定滑块与固定在本体机构上的导轨结构,可以满足超声波破冰系统上下运动时的稳定性要求。经计算,升降系统选用功率为210 W 的电机,为适应不同厚度的压实冰雪,采用伺服电动机。超声波破冰系统由超声波发生器、超声波换能器、超声波变幅杆和破冰刀组成。超声波破冰机构的动力系统由发动机和发电机提供。其中,发动机上的电频与发电机、超声波破冰系统相连接。除冰机器人在人行道路上实时破冰时,通过控制系统控制升降电机并驱动丝杠旋转来实现螺母向下移动,使超声波破冰机构中的破冰刀接触压实冰雪界面,当除冰刀触碰到人行道路上的压实冰雪时,依靠超声波发生器发射的频率与压实冰雪简谐频率相同而产生的共振,能使压实冰雪受高频振动破碎而分离路面[11],从而达到压实冰雪破碎的效果。超声波破冰机构安置在本体装置的前底端,下面就是压实冰雪人行道,破冰刀由8 片刀具呈线性阵列排布而成,固定在超声波变幅杆上,卡在法兰盘中间,并用支柱与螺栓固定在超声波破冰固定架的下端。破冰刀端口呈菱形,刀具截面呈不规则五边形。
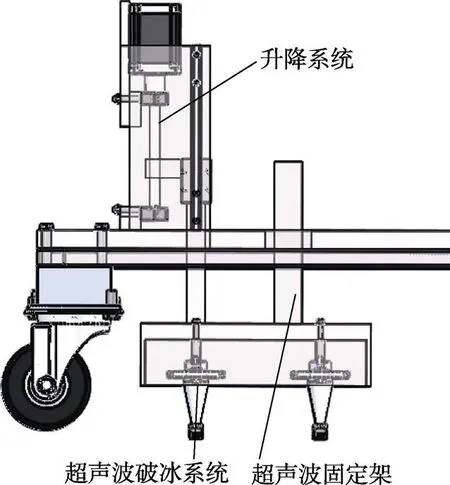
图4 超声波破冰机构Fig.4 Ultrasonic ice breaking mechanism

图5 升降系统Fig.5 Lifting system
超声波破冰原理见图6。其中,超声波发生器将电频交流电转换为超声频的电振荡信号,超声波换能器把超声波发生器产生的超声频电振荡信号转换为机械振动,再传递到超声波变幅杆内进行放大振幅,并聚能到破冰刀上,推动前端的破冰刀,作用于压实冰雪道路,从而实现道路破冰。

图6 超声波破冰原理Fig.6 Principle of ultrasonic ice breaking
2.3 除冰雪机构设计
为了防止在恶劣条件下破碎的冰雪不能被及时清除从而再次形成冰膜,对该机器人设计了除冰雪机构,通过超声波破冰系统将人行道路上的压实冰雪整体破碎并剥离路面,利用推冰雪铲将压实冰雪推至栽有林木的人行道内侧,来避免二次清除。除冰雪机构包括升降系统和推冰雪铲,见图7。

图7 推冰雪铲机构Fig.7 Ice and snow shovel mechanism
除冰雪机构的升降系统与超声波破冰机构升降装置相似,都是采用丝杠把作业装置作为丝杠的螺母驱动该机构进行上下运动。利用曲面旋移原理,将推冰雪铲铲板改为空间曲面设计,可以将压实冰雪铲向人行道内侧。为了适应不同厚度的压实冰雪,采用伺服电动机,调整推冰雪铲与路面的距离,在确保不破坏路面的前提下,实现彻底清除压实冰雪。经计算,升降系统选用功率为60 W 的电机。
2.4 超声波清除压实冰雪机器人控制系统设计
机器人在进行压实冰雪人行道作业时,需要接收控制系统输出的命令。PLC 编程已成为现代工业自动化控制系统中应用十分广泛的软件,其结构简易,抗干预性强,易于学习和把握,使用方便,价格便宜,且自带无线通信功能[12]。在进行压实冰雪路面作业时,要求超声波清除压实冰雪机器人具有无线通信功能,超声波清除压实冰雪机器人控制现场选用的是三菱牌PLCP-FX2N-64,它有FX-232ADP 型无线通信功能,可接收、传送现场信号和控制命令,并接受体系管理控制。
控制系统承担着超声波清除压实冰雪机器人大脑的角色,它操控着在线实施清除压实冰雪的各个执行装置。该控制系统采用STC 公司生产的STC12C5410AD单片机作为超声波清除压实冰雪机器人控制器的主控集成电路。STC12C5410AD 单片机有32 个I/O 引脚,它可以扩充9 个外部中断电路,并有12 kb 的Flash和512 kb 的RAM,具有充足的存储程序和解决数据的容积。机器人控制系统的操控输出命令由全双工异步串行口UART 贯串无线通信模块完成。数据的接收和传送是通过中断位置的判断来操控微控制器进行处理,以提高微控制器作业效率[13-14]。
超声波清除压实冰雪机器人控制各执行装置进行线上作业时,单片机首先对A/D 接口和UART 口进行起始数据设定,然后驱动UERT 口接收RS485和RS232 转换的无线收发的指挥系统信号,单片机内部程序通过查询A/D 的情况进行决定[15-16]。单片机通过计算输出命令,指挥机器人的各执行机构完成向前、向后、转弯、破冰、除冰等作业,机器人清除压实冰雪的控制流程见图8。

图8 机器人清除压实冰雪的控制流程Fig.8 Control flow chart of robot clearing and compacting ice and snow
2.5 人机交互系统总体设计
人机交互指人与计算机之间以一定的交互配合方式,完成确定任务的人与计算机之间的信息交换过程[17]。超声波清除压实冰雪机器人的人机交互信息界面,是超声波清除压实冰雪控制和超声波清除压实冰雪作业系统的重要组成部分,超声波清除压实冰雪机器人利用语音系统及显示器等作为人机交互的硬件接口,以语音识别软件和人机交互界面为软件接口,进行人机配合,其人机交互系统设计见图9。控制者通过语音系统采集模块把控制指令传送到机器人PC机进行处理,机器人通过语音系统输出模块进行音频输出,显示器用来提示语音指令词条,以显示机器人的位置和状态信息。

图9 人机交互系统总体设计Fig.9 Overall design of human computer interaction system
主DSP 负责完成传感器的数据采集、车轮发动机驱动及串行通信的解码等任务,其他电机驱动(如超声波破冰机构和推冰铲机构丝杠电机驱动)都由从DSP 负责。主DSP 和PC 通过RS-232(串口)互相交互信息,2 块DSP 连接在同一条CAN 总线上。通过传感器探测周围环境,并将数据发送到主DSP,再传给上位机进行决定,从而使超声波清除压实冰雪机器人完成行走、破冰和除冰等作业。
3 破冰刀破碎压实冰雪模拟实验
首先,运用有限元软件进行谐波分析,得到声学除冰频率。设超声波高频振动以一定的简谐频率载荷作用于压实冰雪路面,研究压实冰雪路面的稳态响应。采用ANSYS 谐波分析法设定加载子步为80 步,加载频率为20~100 kHz,步长为100 Hz,设置z方向的5 μm 位移载荷,谐振频率—节点应力曲线见图10。由图10 可知,超声波振动频率对压实冰雪产生共振的点有多个,但是超声波换能器的谐振频率为40 kHz,人行道路的共振频率为55 kHz,在频率小于40 kHz 内压实冰雪表面、边界、顶点,以及路面与压实冰雪界面节点产生的共振频率约为27.2 kHz。在压实冰雪脱离路面仿真模拟中,选择该频率作为最佳频率。由仿真分析得到压实冰雪产生共振的最佳频率为27.2 kHz,因此在模拟破碎压实冰雪实验中振动频率选择27.2 kHz,振动幅值为5 μm 时,破碎压实冰雪的共振频率与人行道路的共振频率不同,因此在破碎压实冰雪时可以不破坏路面,且破碎压实冰雪效果比静力下破碎效果更好,见图11。
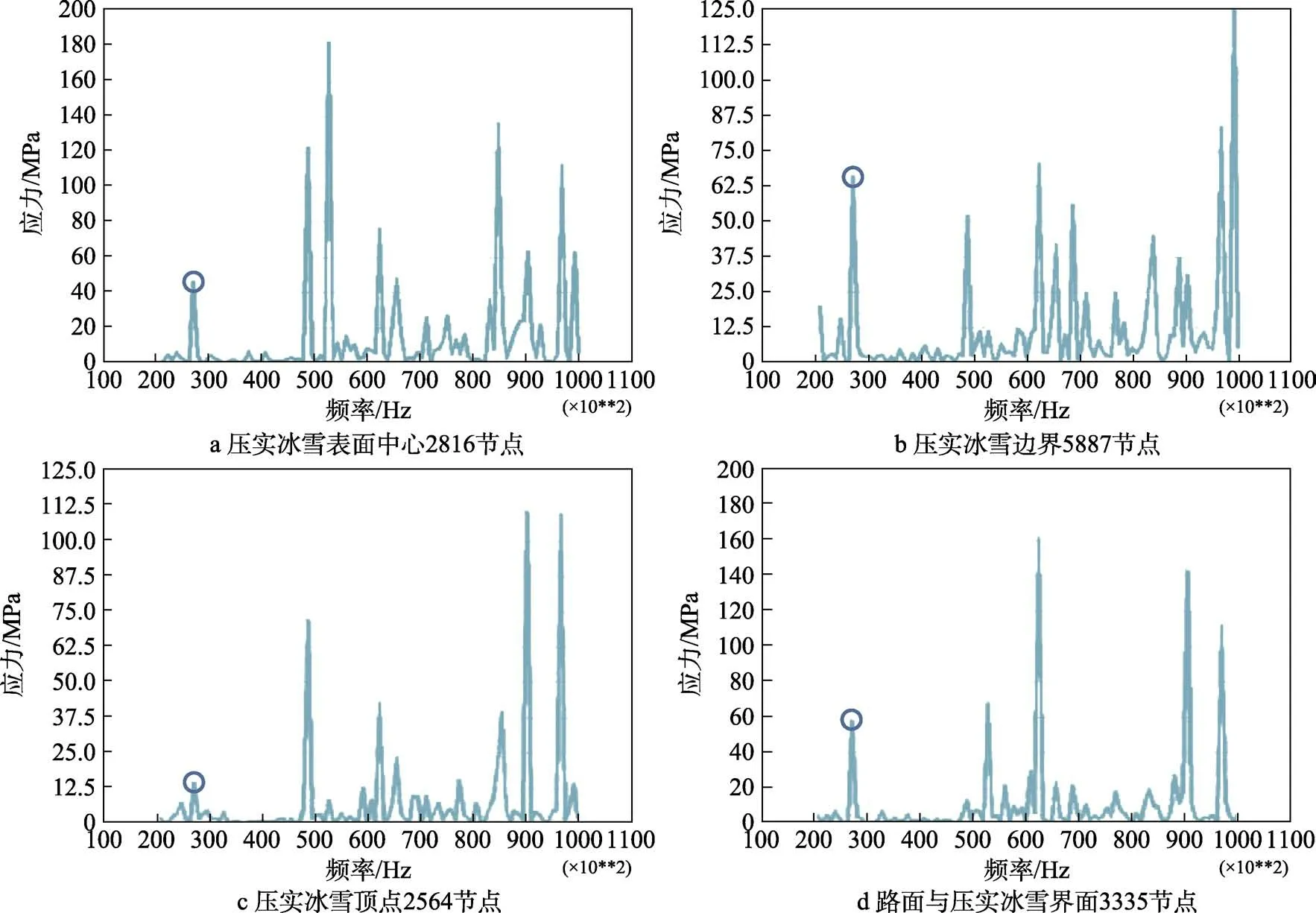
图10 谐振频率-节点应力曲线Fig.10 Resonant frequency node stress curve

图11 破冰测试Fig. 11 Ice breaking test
4 结语
针对人行道清除压实冰雪过程中存在清除效率低、耗时大,以及人行道压实冰雪的复杂性等问题,研制了一种契合人行道路况的小型化、机动灵活的超声波清除压实冰雪机器人。在归纳和分析各类清除压实冰雪方法的基础上,发现严重缺乏偏窄的人行道除冰设备,研究了一种超声波作用下“破冰在先,破除兼备”的新型超声波清除压实冰雪机器人装置。在分析整个机器人设计的基础上,对该机器人的行驶机构、超声波破冰机构、推冰雪铲机构和控制系统和动力系统进行机构设计。运用有限元分析软件对压实冰雪道路进行了谐响应分析,得到最佳破冰频率为27.2 kHz,并模拟了破冰实验,模拟结果认为,利用超声波破冰方法清除压实冰雪更有效且可以不破坏路面。
猜你喜欢
机床与液压(2022年8期)2022-09-19
建材发展导向(2022年4期)2022-03-16
时代英语·高一(2021年1期)2021-03-18
当代陕西(2020年15期)2021-01-07
汽车实用技术(2020年4期)2020-04-10
环球时报(2018-12-19)2018-12-19
环球市场(2017年6期)2017-09-10
商情(2017年4期)2017-03-22
筑路机械与施工机械化(2017年1期)2017-02-18
筑路机械与施工机械化(2017年1期)2017-02-18
