无人机航测技术在土遗址保护工程中的应用*
2022-04-24 01:06魏廷亮
地矿测绘 2022年1期
魏廷亮
(甘肃大禹九洲空间信息科技有限公司,甘肃 兰州 730000)
0 引言
土遗址是以土为主要建筑材料的具有历史、文化和科学价值的古遗址[1]。在土遗址保护工程施工过程中,往往存在部分区域人员无法达到,导致传统测量仪器无法精确实测等困难。近年来,随着科学技术的发展,无人机低空摄影测量的硬件及软件得到了快速发展,同时也涌现出了一大批后期数据处理软件,为无人机航空摄影测量技术在各行各业中的应用奠定了坚实的基础。本文通过采用无人机低空摄影测量技术,分析大疆经纬M300 RTK在郑州市某遗址公园保护工程中应用的可行性及其测量精度,以期为后期大面积土遗址保护工程的顺利实施奠定一定的实践基础。
1 试验方法
1.1 项目概况
郑州有着灿烂古老的历史文化背景,但是近些年经济和工程建设的快速发展加剧了对市内土遗址的损坏。为保护郑州市区的土遗址,2018年6月至2019年6月,郑州市开展了土遗址保护勘测工作。项目区位于郑州市某遗址公园,地形起伏较小,海拔在124~135 m之间,植被覆盖度约20%~30%,以天然野草为主。区域测量面积约17.3万m2,东西长320 m,南北宽约540 m,测区呈带状分布。项目区内土工建筑损坏严重,大多已不能辨认原始形态,部分区域高差较大,人员无法达到,人工实测难度较大。
1.2 无人机主要参数
本项目使用无人机为大疆经纬M300 RTK无人机。该无人机具有续航时间长、影像清晰度高、定位更加精准等优点。大疆经纬M300 RTK最大续航实践为55 min,有效载荷达到2.7 kg,同时具有六向传感器,用于识别和避开障碍物,最大图传距离可达到15 km,时速可达到82 km/h。大疆经纬M300 RTK的基本参数见表1。
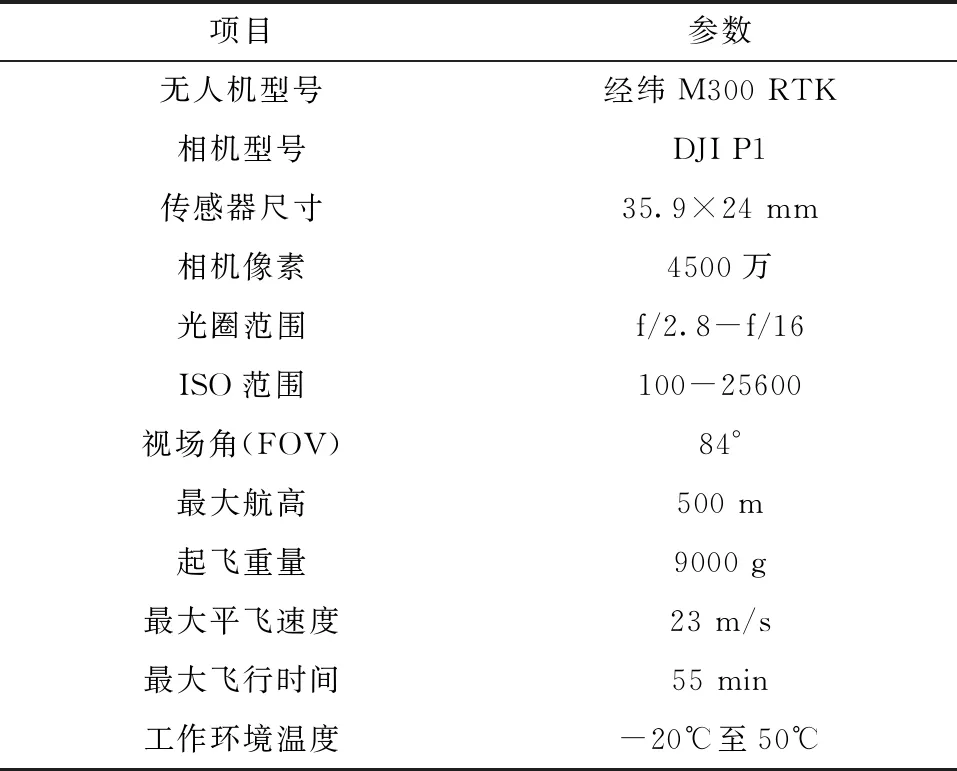
表1 无人机的基本参数
1.3 航测方案
本次航测作业流程主要包括现场踏勘、像控点布设、航线规划及外业测量、内业数据处理、数据分析、编写技术报告等,具体如下:
1)现场踏勘。无人机航测作业前需要提前进场进行现场踏勘,主要是对测区边界、测区高差、地表植被覆盖程度、天气状况、空气质量状况等进行现场查勘,同时踏勘过程中可以初步确定像控点布设方案、航测方案等,为后续工作做好基础准备。本项目航测区域位于城市中心地带,交通便利,目标两侧有两条主干道公路;无高层建筑,航测视野良好。
2)像控点布设。经过前期现场踏勘结果,根据拟定的像控点布设方案,利用RTK等测量仪器在现场布设像控点,可依据现场地形、地物适当调整间距、位置。像控点布设方案主要遵循以下原则[2]:一是地面像控点尽量选择空旷地区,周边遮挡物较少或无遮挡物地区;二是依据测图比例尺、测区范围,合理确定像控点分布密度、间距,同时加强对测区边界影像图的精度控制,对地形起伏较大、色调单一地区可适当增加像控点数量以提高航测精度。
依据本项目测区地形及设计要求,在目标区域附件共选取了12个像控点(见图1),像控点均匀分布,无物体遮挡,航摄视线良好,像控点布设采用白色腻子粉在硬化地面做十字标记,线宽统一设为10 cm,然后利用RTK对每个像控点的三维坐标进行数据采集。像控点的坐标系选择2000国家大地坐标系,参考投影为高斯三度带投影,中央子午线为114°,高程基准为1985国家高程基准。
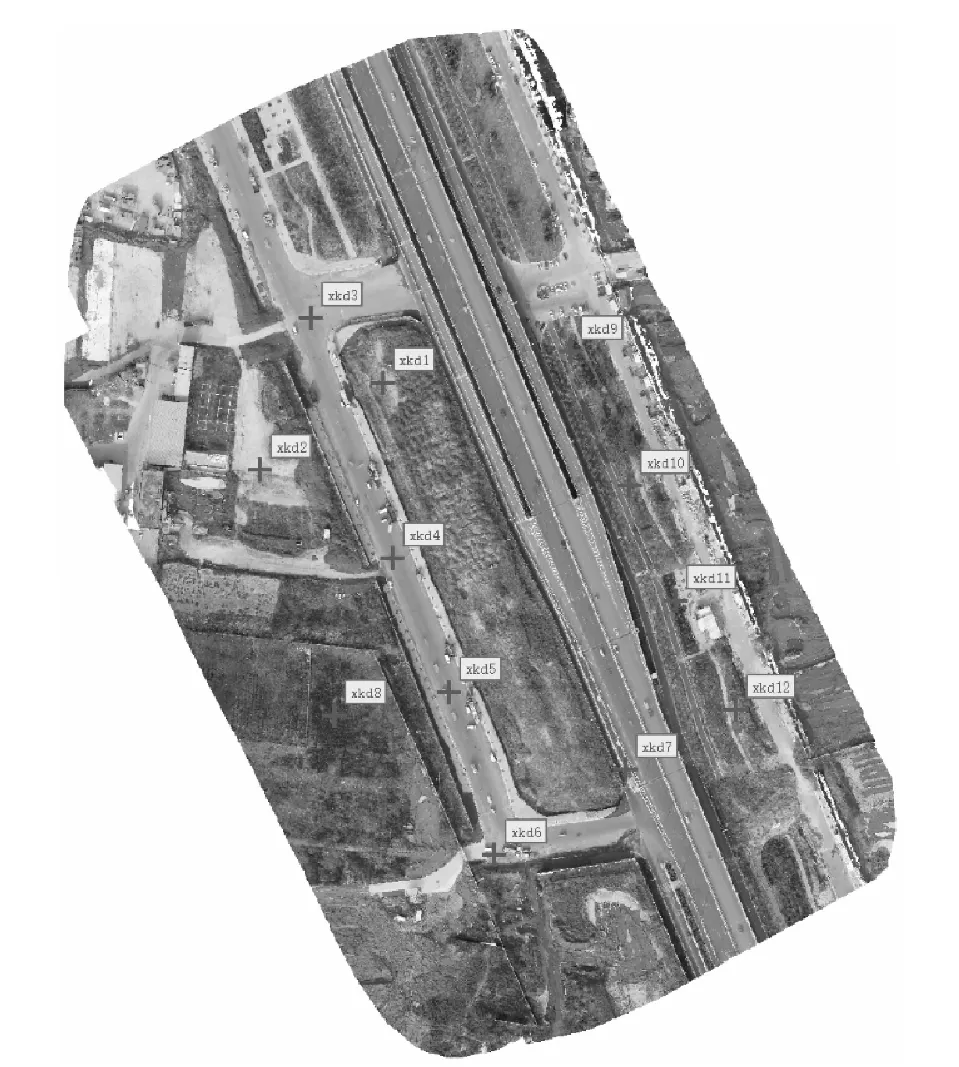
图1 地面像控点位置分布图
3)航线规划及外业测量。依据低空数字航空摄影测量相关规范要求[3-4],本项目共设计1个架次,飞行时间共28 min,共拍摄照片1 040幅,各项飞行参数见表2。到达现场后对天气状况、空气透明度、风力等判断是否适合执行航测任务,各项条件均满足后依据地势高差、起飞点相对测区位置等重新调整航线任务,然后依据天气状况检查相机各项参数,待各项核对无误后执行飞行任务。
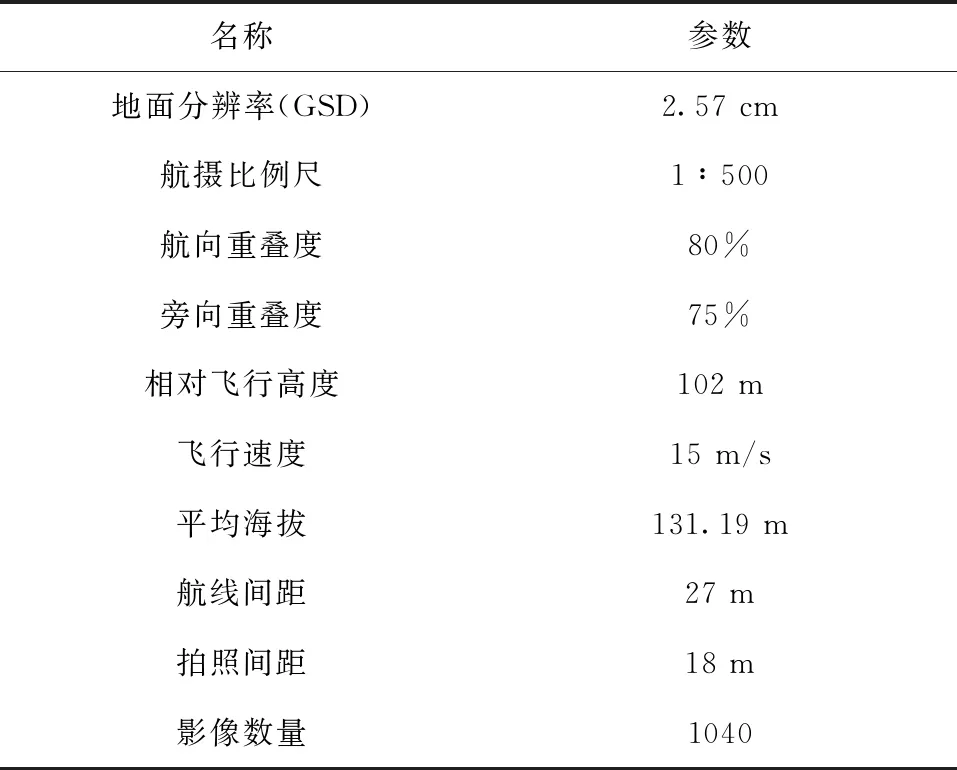
表2 飞行参数
4)内业数据处理。外业任务结束后使用Pix4Dmapper软件处理无人机航拍影像,处理步骤包括像控点刺点、空三计算、三维模型构建、数字产品生产等,具体操作流程见文献[5]。
2 结果与分析
2.1 影像数据处理结果
将无人机航测获得的影像数据导入Pix4Dmapper中,生成三维点云数据、数字表面模型以及数字正射影像图。图2(a)为影像重叠度分布图像,从图中可以看出测区范围内大部分区域重叠度均为五张以上照片,为高精度的三维数字成果奠定了基础;图2(b)为数字表面模型图,图中高程最高目标为高架公路,土遗址位于高架公路左侧,地形起伏明显。图3为点云数据生成的三维数字模型。从中可以看出,模型细节丰富,立体效果显著。
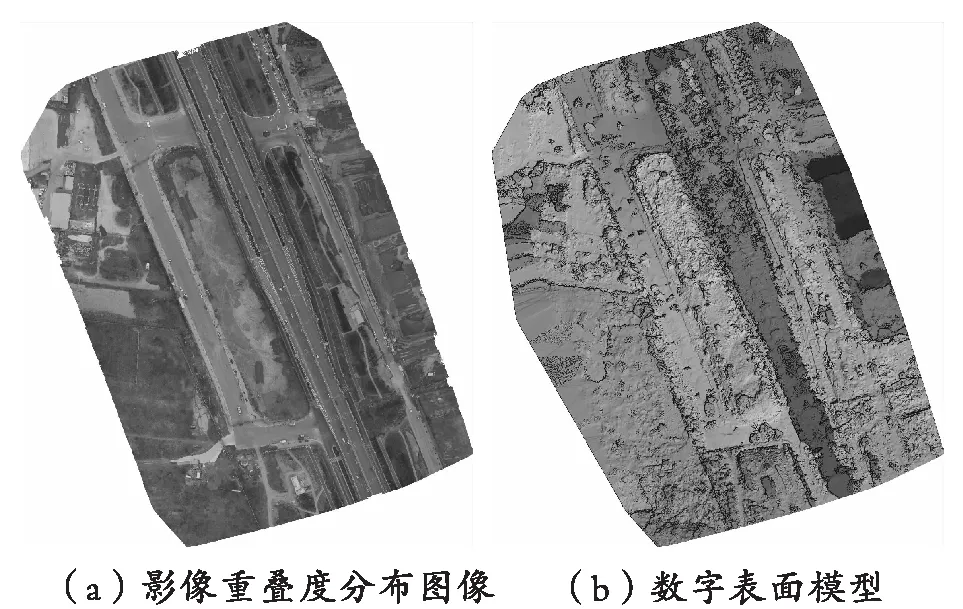
图2 影像重叠度分布和数字表面模型图
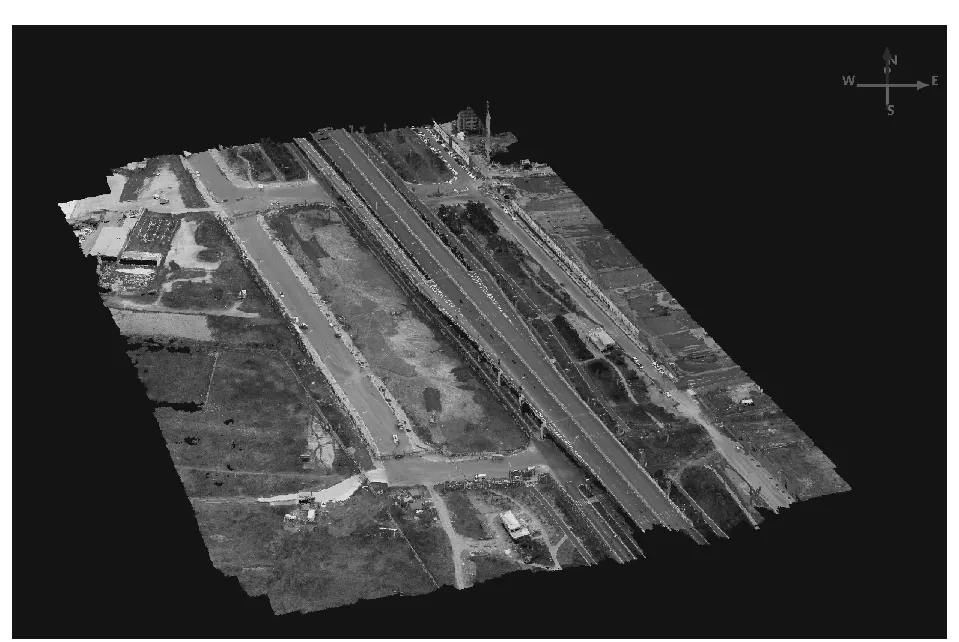
图3 三维数字模型
2.2 像控点及检查点精度分析
为检查本次航测任务的精度,本文通过利用网络RTK采集地面特征点三维坐标信息,共选取水泥路拐角、房角、电线杆等22个检查点,检查点选取时均匀分布于整个测区内部,以全面反映测区范围内各地块的精度。为全面分析本次航测任务的精度,本文选取平均误差(Mmean)和中误差(M)两个指标来验证无人机航测各检查点点位的精度,计算公式如下:
(1)
(2)
式中:n代表像控点数量;Pi代表该特征点的摄影测量计算值;Qi代表该特征点的地面网络RTK实测值。
计算结果如表3所示,从中可以看出:像控点航测精度较高,平面坐标及高程的平均误差及中误差均达到了4 cm以内,其中X方向的精度最高,平均误差及中误差均达到了2 cm以内,说明像控点对三维模型的几何纠正效果达到了较高的精度,且三维模型中像控点附近的点位几何精度最高;检查点平面坐标及高程的平均误差、中误差精度普遍位于3~7 cm,其中X方向误差最大,平均误差达到5.76 cm,中误差达到6.27 cm,说明检查点平面精度也达到了较高的精度,可以满足1∶500大比例尺地形图测绘的精度。
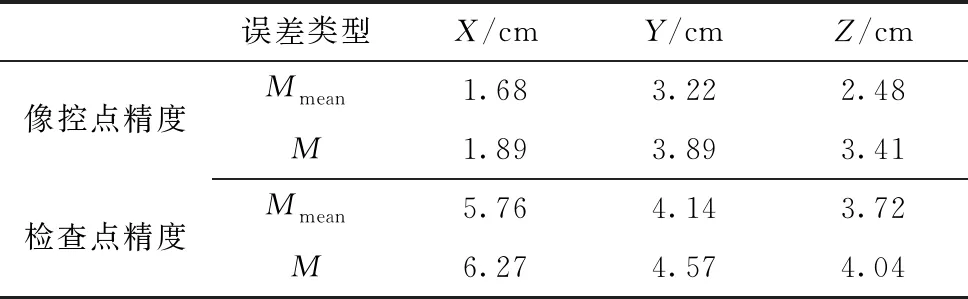
表3 测量点位精度统计结果
2.3 施工土方量计算精度分析
土遗址保护工程施工过程中不可避免会涉及到土方量施工,为工程量的核算提供较为准确的测量依据,而传统的土方量计算主要采用RTK、全站仪、水准仪等测量仪器进行实测,通过加密特征点的数量来提高土方量计算精度,测量及内业计算过程复杂,且对于一些人员无法达到或者无法架设仪器的区域难以精确测量,甚至只能通过粗略估算其土方量。然而无人机航空摄影测量这一作业手段则顺利解决了这一难题,通过数字测绘成果中的三维点云数据,可以提取所有无人机可以观测到区域的三维点位坐标,且用于计算土方量的点位密度可达到间隔1~2 cm一个点,因此,理论上可以大大提高土方量计算精度。本文通过利用网络RTK现场全面实测点位坐标,分施工前、施工后分别施测,通过与无人机实测的土方量计算结果进行对比,对比结果见表4。
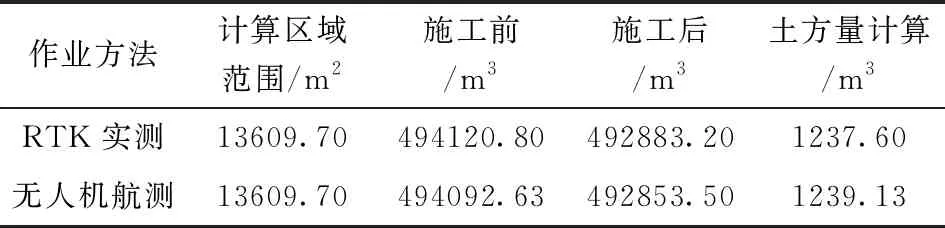
表4 不同作业方法土方量计算结果对比
从表4可以看出,利用无人机航测作业方法计算得到的土方量与利用RTK实测得到的土方量误差较小,为1.53 m3,相对误差为0.12%,说明无人机航测的精度较高,可达到传统作业手段的测量精度。
3 结束语
本文分别从无人机航测作业流程、内业数据处理、精度分析等角度分析大疆M300 RTK在土遗址保护工程中的应用可行性及其精度,得到如下结论:
1)在一定像控点密度的情况下,利用无人机航测可以达到较高的精度,其平面坐标及其高程均可达到1∶500大比例尺地形图的测量精度。
2)无人机航测计算的土方量与传统测量手段计算的土方量相比,误差仅为1.53 m3,相对误差为0.12%,说明利用无人机航测计算土方量的精度较高。
3)无人机航测作业手段为土遗址保护工程提供了一种更为快捷的测量方法,与传统作业手段相比,大大提高了作业效率。
猜你喜欢
汽车观察(2022年12期)2023-01-17
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
计算机应用文摘·触控(2021年20期)2021-11-11
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
焦点(2018年10期)2018-01-28
——会飞的自拍杆
商业文化(2017年34期)2017-12-21