
基于显著性检测的红外舰船目标检测识别技术
2022-04-24 03:23苗传开娄树理
烟台大学学报(自然科学与工程版) 2022年2期
苗传开,娄树理
(烟台大学物理与电子信息学院,山东 烟台 264005)
红外舰船目标检测与识别是红外成像反舰导弹的一项关键技术,决定着反舰导弹跟踪制导性能,一直是国内外研究的热点问题。从国内外红外成像反舰导弹使用和试验结果来看,目前仍存在岛岸背景下目标自动识别难度大、抗云雾雨雪等干扰能力不足等问题,严重制约着红外成像反舰导弹武器装备性能,如何在复杂环境背景下有效对舰船目标自动检测识别已成为急需解决的难题。
目前,国内外研究者在红外成像舰船目标检测与识别方面做了大量的工作,也取得了一系列进展。黄英东等[1]研究了利用海天线位置定位目标舰船的方法,该方法能够有效提取海天线以及舰船目标在海天线区域中的位置;李翠红[2]提出了一种利用海天线定位以及自适应阈值法的自动检测算法,可有效增强红外图像的对比度、抑制背景,运算速度也较快;郭小威等[3]利用海天线位置信息提取了目标区域的多个特征,运用加权平均法进行红外舰船目标的特征融合,能够有效提高红外舰船的识别准确率。这些方法是在提取海天线的基础上进行检测识别,然而对于一些复杂环境背景下海天线提取极为困难,一旦无法提取或者发生误检则导致整个检测识别算法无效。本文针对复杂环境背景下的红外舰船目标图像,提出一种基于显著性检测和不变矩的舰船目标检测识别方法,在图像预处理的基础上利用显著性检测算法进行舰船目标的检测,并提取目标特征,利用不变矩、长宽比、占空比等多种特征对舰船进行识别。
1 红外图像预处理
根据红外成像的机理分析,舰船目标的红外图像通常是灰度图像,直接反映的是目标与背景的辐射能量强度信息。舰船目标红外图像噪声较大,受海面远距离大气传输衰减的影响,形状和纹理信息不足,对比度较低,目标直接提取困难;舰船目标红外成像受季节、天气以及光照等因素影响较大,特别是恶劣气象环境下的烟、云、雾、雨和雪等会严重影响成像效果,使舰船目标图像模糊不清。因此,为有效实现舰船目标的检测与识别,有必要对舰船目标红外图像进行预处理,有针对性去除噪声,增强图像对比度。
通过对舰船目标红外图像分析发现,图像主要有2类噪声:(1)脉冲噪声,由于红外焦平面阵列器件盲元的影响,成像时敏感元饱和或不响应导致图像出现脉冲噪声点;(2)由于红外光学系统的衍射像差、红外探测器的积分效应、非均匀性以及电子线路的作用,图像存在大量的噪声,从噪声整体统计特性来看,可以认为噪声服从高斯分布[4]。本文采用中值滤波和维纳滤波的滤波组合、灰度伽马变换增强的预处理方案,中值滤波器可以有效滤除脉冲噪声,维纳滤波可以有效滤除高斯噪声;针对舰船目标红外图像对比度不够、信噪比低的问题,滤除噪声后采用伽马非线性变换实现对比度增强,增强舰船目标,以利于后续目标检测。
2 图像显著性检测
图像显著性区域检测是近年来计算机视觉和图像处理领域的研究热点之一,其目的在于让计算机学习人眼快速识别定位图像的显著性区域的能力。Itti模型是一种经典自下向上的显著性算法,能快速提取视场中最为显著有用的目标信息,检测效果好且提取的区域分辨率较高,算法具有一定的计算效率,其算法大致可分为构建多尺度图像金字塔、提取底层空间特征以及计算显著性区域3个环节[5]。
2.1 构建多尺度图像金字塔

其中:x′为核函数中心,σ为函数的宽度参数,控制了函数的径向作用范围。
2.2 中央周边差操作
所构建的图像金字塔中,尺度越大的图像,其高频细节越多,反之,尺度较小的图像,由于平滑和抽样等操作,从而更能反映背景信息,将图像金字塔中的大尺度图像与小尺度图像进行跨尺度的减操作,得到局部中心和周边背景信息的反差信息。具体算法[7]如下:
(1)小尺度的图像进行线性插值,目的是让小尺度图像与大尺度图像有相同大小,方便接下来进行点对点的减操作,即中央周边差操作:
I(c,s)=|I(c)⊖I(s)|,
O(c,s,θ)=|O(c,θ)⊖O(s,θ)|,
其中:⊖表示将两图像的尺寸调节到一致后做矩阵减法操作,I表示灰度信息特征图,O表示方向特征图。
(2)对每个特征通道的高斯金字塔进行中央周边差操作,依次检测图像中的特征不联系性,即中心和周边背景信息反差对比强烈的区域。
(3)将产生的中央周边差结果图进行总结,得到特征图。
2.3 显著性图
在得到初步的特征图像后,进行红外舰船图像的底层的特征提取,提取多尺度红外舰船图像的灰度信息,输出显著性图像。显著性图通过显著性的空间分布来表示醒目度或显著度,在视野中每个位置用一个定量向量表示,引导注意位置的选择。
在显著性图构建过程中,由于该模型缺少自顶向下的监督机制,使用特征归一化操作运算符N(·)对特征图进行优化,具体操作如下[7]:
(1)首先对输入的特征图归一化到统一范围[0,…,M];
(3)结合处理好的特征图,计算最终的显著性图像:

其中:⊕是指多个图像调整至统一尺寸后相加的操作。

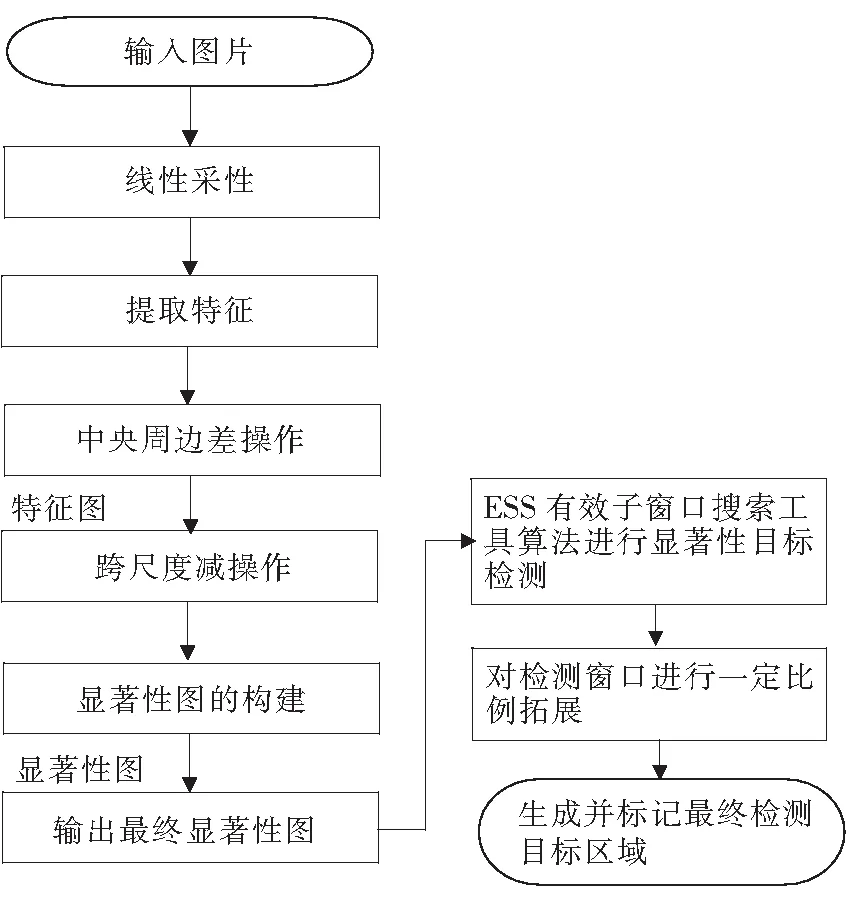
最后得到显著性图像后,利用ESS[8-9]有效子窗口搜索工具算法进行显著性检测检索与标记,可有效检测出舰船目标区域,并对检测到的矩形窗口进行一定比例扩展,得到最终的显著性目标区域。算法结构流程见图1。
3 特征提取及目标识别
3.1 形状特征及灰度特征提取
通过对舰船目标红外图像的特点分析,本文选择如下特征:目标的占空比;目标的长宽比;目标所在显著性区域灰度均值。
3.1.1 占空比特征函数 分割后舰船连通区域面积与紧套分割区最小矩形的面积比为[10]R1=Ar/Aw,
其中:Ar为分割舰船面积,Aw分割区矩形面积。
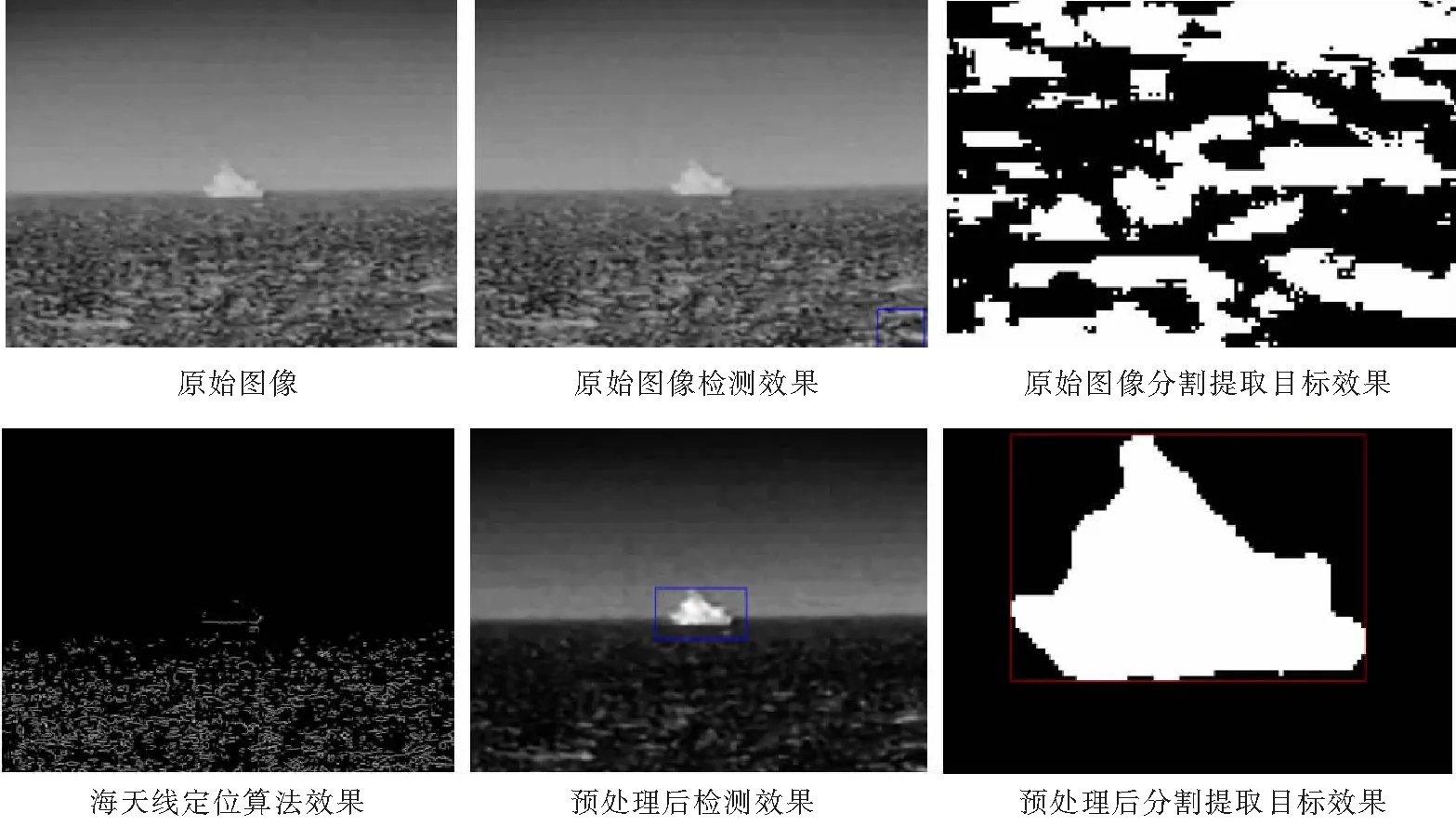
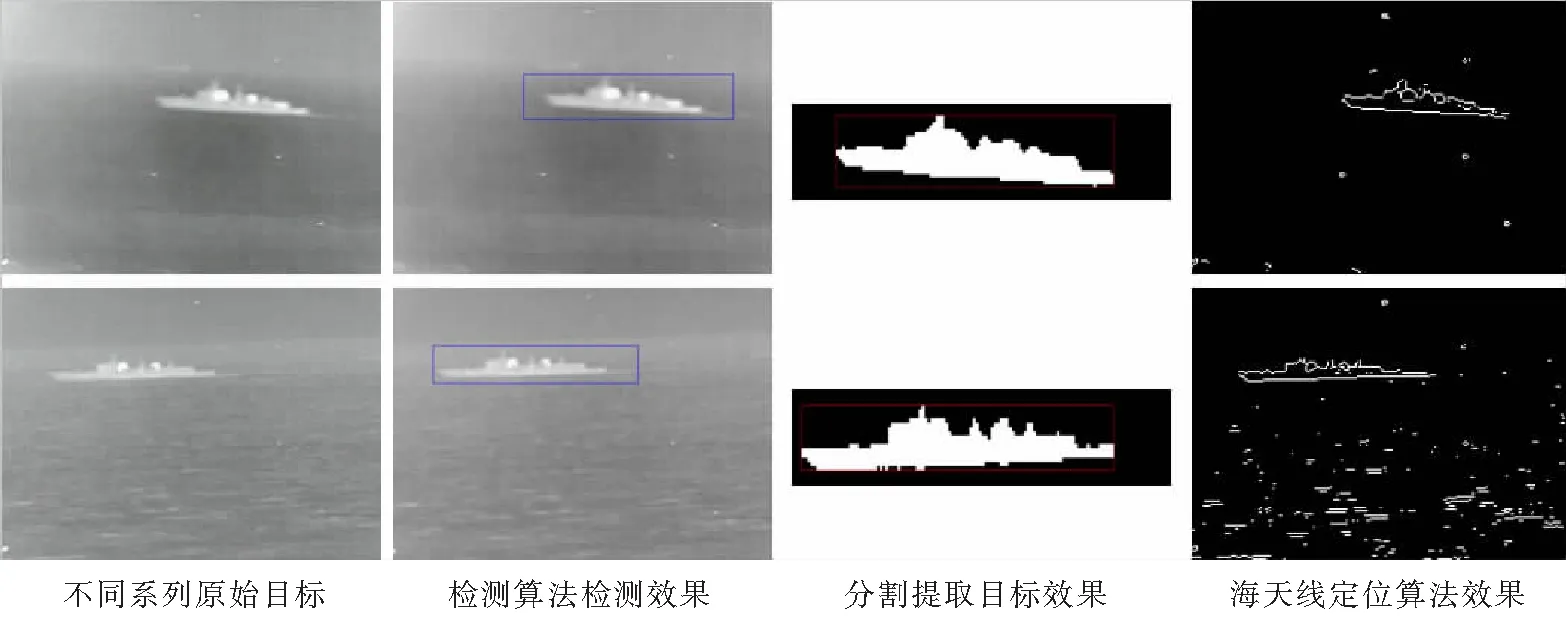
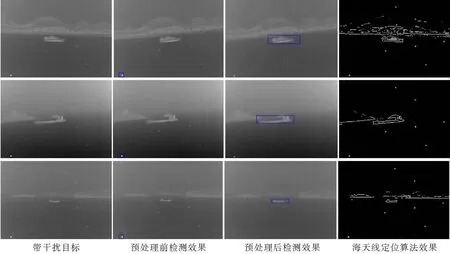
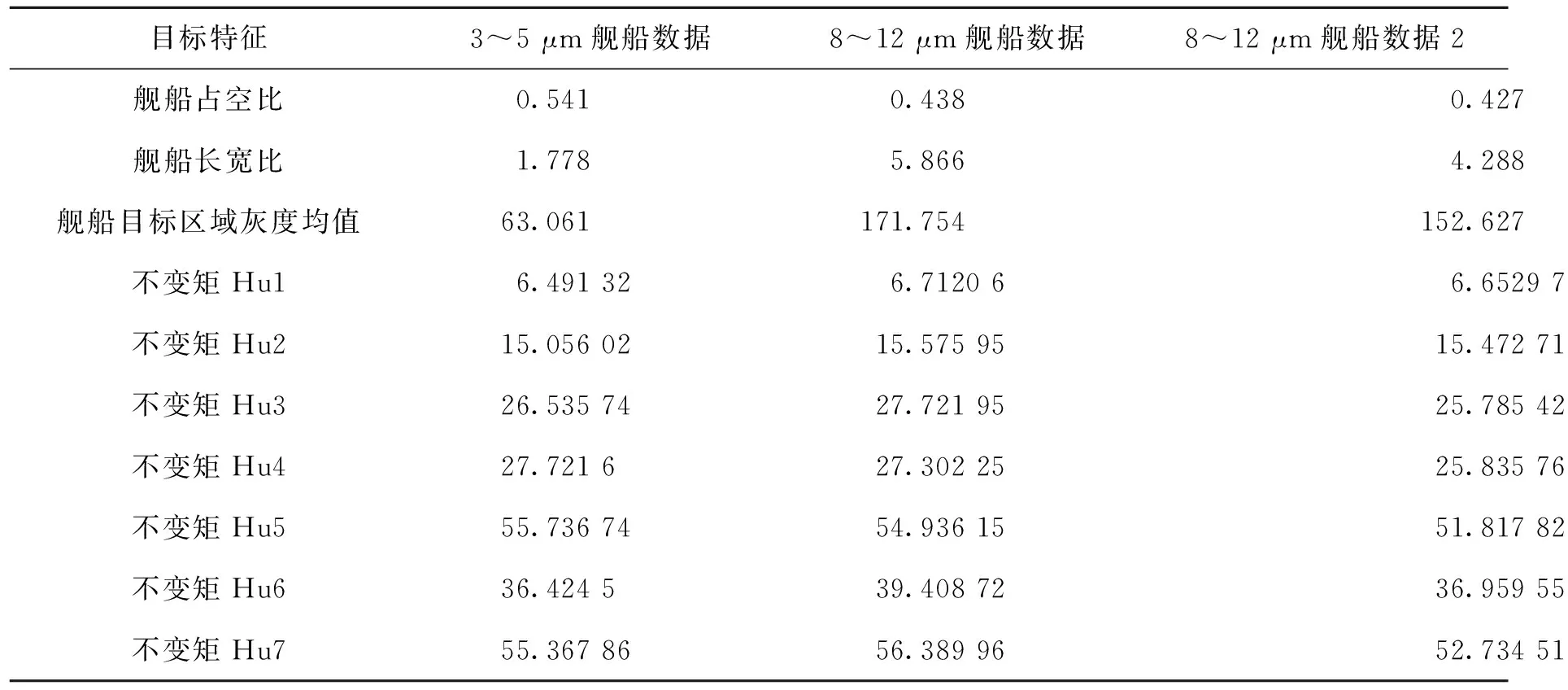
若T2≤R1 其他μR1=0。其中:0 图1 显著性检测流程 3.1.2 长宽比特征函数 紧套分割区矩形的长宽比为[10]R2=Lh/Lw,其中Lh为分割区矩形长,Lw分割区矩形宽。 若T2≤R1 其他μR2=0,其中:0 其他μR3=0。 由于图像几何不变矩特征具有旋转、平移、尺度等特性的不变性,在红外舰船目标识别领域,不变矩可以作为一个重要的特征,本文选取Hu不变矩作为红外舰船目标的重要特征。 利用二阶和三阶归一化中心距计算的7个Hu不变矩,其数学表述如下[12]: 上述7个不变矩可构成一组特征向量,其具有旋转,缩放和平移不变性,设Hu不变矩的特征函数为μR4。 其他μR4=0。 目标识别算法是对待测目标与标准样本之间的相似程度,根据提取的目标特征值,本文采用模糊综合评判方法[13],利用特征函数的隶属度构造目标置信函数P,进行综合目标判断, P=ω1μR1+ω2μR2+ω3μR3+ω4μR4, 式中:ωi为权重系数,对大量红外舰船样本图像分析后,根据各特征稳定度和识别相关度确定权重系数值,并确定综合置信区间,设立综合判据可实现对舰船准确识别。 本文算法采用显著性检测算法对大量舰船目标红外图像进行仿真实验,图像波段分别为3~5 μm和8~12 μm,图像大小分别为621×471、241×171,通过实验可以发现,直接对原始红外图像进行显著性检测时,由于海面杂波过于严重,从而导致检测算法失败,以至于后续分割提取目标分析出现严重偏差;经过预处理后,检测算法可以成功检测到舰船目标,得到舰船目标的显著性区域,效果对比见图2。 为了验证算法的有效性,本文对不同系列的红外舰船图像进行效果检测,实验结果表明本文检测算法可以完整检测到目标舰船的显著性区域;针对通常算法难以检测目标的岛屿背景,本文显著性检测算法也可以成功准确检测出目标舰船区域;有些红外舰船系列图像受岛屿背景的影响,海天线特征不明显,提取困难,因此基于定位海天线的检测算法无法对该系列图像进行有效的检测处理,而本文算法可以成功检测出舰船目标区域,算法仿真效果对比见图3、图4。 图2 系统仿真结果对比 图3 8~12 μm系列图像效果 采用显著性检测算法获得显著性区域后,针对显著性区域进行分割与提取目标特征,图2、图3中3组序列图像的舰船特征数据见表1。 从特征数据来看,同一序列图像的舰船长宽比、占空比数据基本不变,不同序列图像的舰船长宽比、占空比数据差异较大,也说明长宽比、占空比受舰船姿态影响大,隶属度函数中权重相对要小;同一波段图像的检测区域灰度均值基本不变,不同波段图像的灰度均值差异较大,也说明不同波段下舰船红外灰度特征不同,符合理论分析结果;3组序列图像中Hu不变矩特征数据基本不变,说明特征不受舰船姿态影响,具有旋转、平移和尺度不变性,舰船目标识别具有相对稳定的识别效率。 大量仿真实验可知,本文检测和识别算法可以对多种不同场景的红外舰船目标进行有效检测识别,适应性较强,检测识别率可达90%以上。 图4 含岛屿背景干扰的红外舰船目标效果 表1 不同系列舰船的各项特征 针对海天背景舰船目标红外图像的噪声问题,首先采用预处理滤除噪声,增强对比度,随后使用显著性检测方法对舰船目标区域进行检测分割,最后提取舰船多种特征并建立置信空间,实现对舰船目标识别。本文算法能够快速检测出不同系列的红外舰船目标,采用多特征相结合的综合评判识别方法,具有较高的检测识别准确率,可有效解决红外舰船目标的检测识别问题。

3.2 Hu不变矩特征提取
3.3 目标识别
4 算法仿真分析
5 结束语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15舰船科学技术(2022年10期)2022-06-17环球时报(2022-05-23)2022-05-23黑龙江大学自然科学学报(2022年1期)2022-03-29航天返回与遥感(2022年1期)2022-03-09计算机仿真(2021年7期)2021-11-17金桥(2021年4期)2021-05-21舰船科学技术(2021年12期)2021-03-29华人时刊(2020年23期)2020-04-13中国知识产权(2018年12期)2018-12-29
