
测绘新技术在房地一体项目中的应用分析
2022-04-20 06:47冯啸
科学技术创新 2022年10期
冯啸
(四川省地质测绘院有限公司,四川 成都 610017)
随着美丽乡村建设、房地一体项目的开展,农村不动产被提上了日程。然而农村房屋建设随机,结构多样,分布密集,采用传统的全站仪架站测量,每站采集的有效数据量小,需要频繁换站,效率低;外业作业,夏天易中暑,冬天温度太低,都不利于外业作业,且外业作业较内业来说,其风险性更高[1-2];外业需要住宿宾馆或者搭车往返项目部与作业区,路上浪费时间,住宿宾馆额外增加了生产成本,较内业来说,其作业耗费资金更多;农村住户都是以种地为主,每年在田地里的时间较多,平时在家较少,导致入户工作难以推进[3-4]。然而全国房地一体项目的开展,其要求要在较短时间内完成全部数据的测绘,因此采用传统方式很难按期完成数据生产[5]。为了解决这一问题,笔者深入研究目前主流的倾斜摄影技术和激光点云技术,并对这两种技术进行了简单介绍。以实际项目中的一个农村为例,采用两种方式对该村进行地籍测绘。并通过布设检查点来检测地籍图成果的精度,结果表明:采用本文的方法,较传统作业方法来说,其效率更高、风险更低、生产成本更低,且每户只需一次入户即可,解决了入户难的问题,且成果精度可以满足房地一体项目精度需求,可为农村房地一体项目的开展提供有效思路,为房地一体项目按时按点、高质量完成提供保障。
1 案例分析
1.1 倾斜摄影测量技术在房地一体项目中的应用
倾斜摄影在房地一体项目中的应用主要包括外业和内业两部分,其中外业主要包括影像数据的获取和控制点的测量,内业主要包括数据预处理、空中三角测量解算、三维模型生产和地籍图测绘,其主要流程如图1 所示[6]。
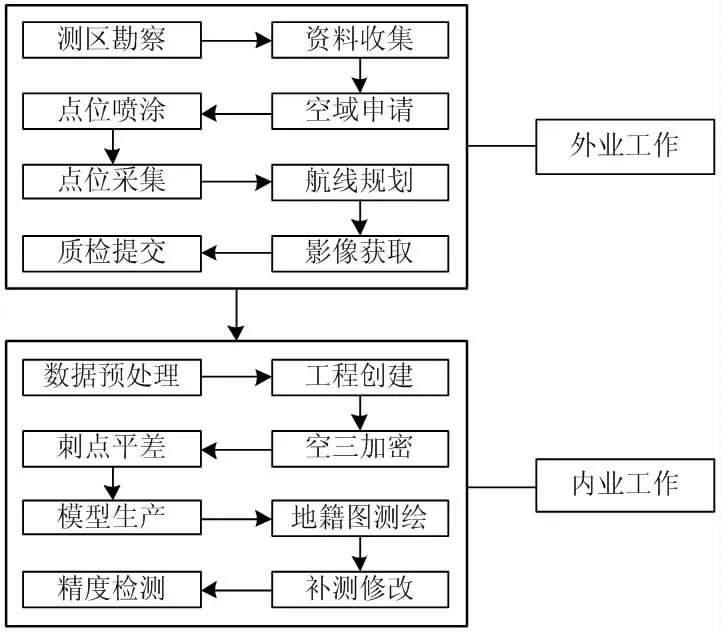
图1 倾斜摄影测量技术在房地一体项目中的应用流程示意图
1.1.1 外业工作
外业工作主要有测区勘察和资料收集、空域申请、控制点喷涂与采集、航线规划和影像数据获取、影像数据质检和成果提交四部分。
1.1.1.1 测区勘察和资料收集。任务区位于四川省德阳市旌阳区某一村落,大约有住户120 户,房屋分布稀疏密集不均匀,任务区内航高差约20 米,已有资料为2018 年0.2米正射影像。
1.1.1.2 空域申请。测区位于禁飞区,若要采用无人机进行航空作业,需首先进行空域申请。在任务实施过程中,首先对空域进行了申请,空域申请内容涉及到航飞高度、航飞范围、航费时间等。在按流程进行申请后,并得到了相关部门的批准。
1.1.1.3 控制点喷涂与采集。为了提高控制点的精度,本次作业均采用喷涂靶标的方式进行,按照200 米间距均匀布设像控点32 个,布设检测点10 个,这些点均布设在地面上,且四周区域空阔,对点位遮挡影响较小。喷涂采用红白油漆喷对三角,三角形边长约60cm,具体形状如图2 所示。

图2 控制点实地照片
1.1.1.4 航线规划和影像数据获取。采用地面站软件按照空域批准文件里的指标,对航线进行规划,规划参数分别为:航摄高度80 米,地面采样分辨率1.3cm,航向、旁向重叠度为85%,按照东西方向进行航线规划。航线规划完成后,将任务上传给飞控中心。在正式作业前,首先对飞机进行检查,检查包括螺旋桨安装是否牢固,相机是否能够正常曝光,记录POS 的模块是否能够正常运行,安装的内存卡是否能够正常写入影像数据,电池电量是否符合航飞要求,在进行一系列检查后,无人机起飞进行航空作业,在航摄过程中,通过地面站观察飞机飞行状态,确保飞行是可控的,在完成数据的采集后,飞机按预定位置进行降落。
1.1.1.5 影像数据质检和成果提交。本次采用武汉讯图的航空飞行质量检查软件FlyCheck 对航飞影像进行质检。五镜头数据,选取下视镜头影像进行检查,检查影像航向、旁向重叠度符合技术设计书要求,采用人机交互方式查看影像质量,影像颜色对比度良好,无云影,地物清晰,影像成果质量整体良好。整理影像、POS和相机报告,完成航摄成果的提交。
1.1.2 内业工作
内业工作主要包括数据预处理、工程创建和完善、空中三角测量解算和控制点转刺平差、三维模型生产、地籍图测绘、精度检测与评定。
1.1.2.1 数据预处理。本次数据预处理主要有以下内容:①影像重命名。采用拖把更名器对5 镜头影像进行统一命名。②POS数据解算。采用POS解算软件,结合5 镜头安装之间的关系参数,以下视镜头对应的POS 为基准,对侧视镜头POS 进行解算,得到精确的POS 数据,使影像和POS能够完全对应。
1.1.2.2 工程创建和完善。本次建模使用目前主流的Context Capture 建模软件。首先新建工程,然后加载影像数据和POS 数据,在软件中设置任务提交路径,填写每个镜头对应的相机焦距,快速检查影像是否有损坏,工程创建完成后,保存工程,即可进行空三解算。
1.1.2.3 空中三角测量解算和控制点转刺平差。空三解算是由软件自动完成的,本次空三按照软件默认设置进行提交,待空三解算完成后,通过人机交互的方式查看空三结果,无明显分层、弯曲等现象,查看加密报告,空三精度良好。然后设置控制点坐标系,导入控制点和检测点,然后结合实地照片进行控制点的转刺,并将检测点也进行转刺,但是设置其类型为检测点,只统计残差,但不参与平差运算。平差完成后,通过平差报告可知,本次控制点平面中误差为0.011 米,高程中误差为0.008 米,检测点平面中误差为0.015 米,高程中误差为0.014 米,精度符合规范要求。
1.1.2.4 三维模型生产。空三完成后,结合电脑配置,设置相关参数,进行模型生产。相关参数设置内容主要有:瓦片划分方式:按照规则平面方式;瓦片大小:设置为120 米,约需内存15G,占电脑内存的1/2;输出格式:选择OSGB,其它参数默认。提交建模任务,完成实景三维模型的生产。
1.1.2.5 地籍图测绘。将实景三维模型加载到清华山维EPS软件中,按照地籍测绘要求,基于模型进行地籍图采集与编辑,并通过模型对房屋等赋正确属性。对于内业不能准确判断或者模型拉花无法采集的,在外业进行调绘补测,然后对成果进行整体修改,将多个作业员的成果进行接边,完成整个成果的整理和提交。任务区部分地籍图如图3 所示。

图3 部分地籍图成果
1.1.2.6 精度检测与评定。利用10 个检测点,对采集的地籍图成果平面精度进行检测,检测结果见图4(图中较差单位为cm)。
通过图4 可知,10 个检测点的较差均介于2cm-5cm,由于点数较少,采用平面较差的平均值作为本次检测点的中误差,经过计算,本次10 个检测点的中误差为4.3cm,成果精度符合规范要求。

图4 检测点较差示意图
1.2 激光点云在房地一体项目中的应用
本次以手持式LiDAR 在房地一体项目中的应用进行实验验证。点云数据处理工作也分为两部分:外业和内业,外业主要是控制点的喷涂与采集和点云数据的获取,内业主要包括点云数据预处理、点云数据纠正与拼接、点云抽稀与输出、地籍图测绘和精度检测与评定,其主要流程如图5所示。

图5 手持LiDAR 在房地一体项目中的应用流程示意图1.2.1 外业工作
1.2.1.1 控制点的喷涂与采集。在点云数据采集前,现在建筑物的侧面固定靶标,确保后续点云数据纠正可以使用这些点,检测点主要采集在建筑物的顶点处,这样便于后期对建筑物的精度进行检测。采集采用全站仪,首先利用RTK采集一个坐标,然后以该点坐标为基准进行采集,采集成果可用,其中采集控制点25 个,采集检测点12 个。
1.2.1.2 点云数据的获取。在控制点采集完成后,紧接着进行点云数据的采集。此次点云数据采集使用的设备是思拓力H8 手持三维激光扫描仪,该设备点云密度高,采集成果质量高。在采集过程中,手持设备匀速前进,在电脑端可以实时显示采集的成果。
1.2.2 内业工作
1.2.2.1 点云数据预处理。点云数据预处理主要包括点云数据的格式转换和滤波,格式转换主要是将采集的成果转为软件可以导入的格式,本次点云数据处理使用的软件是LiDAR360,该软件处理点云数据能力强,且在滤波环节,可以根据不同地形多次滤波。通过对获取的点云数据进行滤波处理,得到高质量的点云成果,该成果过滤掉了树木、电杆等地物,保留了建构筑物的结构和纹理。
1.2.2.2 点云数据纠正与拼接。利用采集的控制点对滤波后的点云数据进行纠正,以确保点云成果的绝对精度能够满足地籍精度需求。本次通过对点云纠正,得到纠正后的控制点中误差为1.1cm,精度完全可以满足地籍精度要求。对于重叠冗余部分的点云进行删除,确保接边区域点云精度合格,过渡自然。
1.2.2.3 点云抽稀与输出。手持H8 采集的点云密度很高,数据量很大,并不利于后期点云数据成果的使用,因此在实际作业过程中,对点云数据进行了适当抽稀,主要抽稀的部分为墙面,即较平坦的面,这样尽可能的保留下了建筑物边缘部分,对后期地籍的采集影响较小,然后输出las 格式的成果。
1.2.2.4 地籍图测绘。本次地籍图测绘和实景三维模型地籍测绘使用同一个软件,即EPS软件,版本为V5,该版本导入点云采集,需要的格式为pcd。首先通过EPS点云格式转换功能,将LAS 格式转为pcd 格式,然后按照地籍图测绘要求,在点云上进行地籍图的采集。对于遮挡严重区域,无法准确采集的,外业通过全站仪、RTK等设备进行补测。
1.2.2.5 精度检测与评定。在地籍图采集完成后,使用12个检测点对所采集的成果精度进行检测,检测结果见表1所示。

表1 检测点精度检测统计表 单位:cm
通过表1 可知,本次12 个检测点中平面较差最大的为4.8cm,最小的为1.5cm,中误差为3.3cm,成果精度符合地籍规范要求。
2 两种方式优缺点对比
通过两种方式生产地籍图,可以得出以下几点结论:
2.1 倾斜摄影方式,空三加密环节容易出问题,且建模效率低,需要等待时间长,点云数据获取后,经过快速处理,就可以进行地籍图测绘,其前期数据获取和处理所需时间短。
2.2 倾斜模型较点云模型更为真实直观,且OSGB格式模型,在采集时较为流畅,数据量小,可以很容易辨别地物和边界。
2.3 模型是对多视影像密集匹配后的点云进行了三角网构建,在构网时,对部分房角点进行了丢弃,这样使得采集的房角点精度较差;点云较倾斜,保留了更多的房角点,使得采集的房角点精度较高。
2.4 倾斜和点云技术,对作业人员要求都比较高,两种数据源在地籍图采集环节,其效率基本上一致。
2.5 点云数据在滤波环节对作业员的技术和经验要求高,不然滤波成果质量差,会影响后期其他环节的操作。
2.6 倾斜摄影属于低空作业,在作业前,需要进行空域申请,手持式点云数据地面作业,不需要进行申请,按照正常作业流程开展即可。
2.7 倾斜摄影从空中作业,房屋密集狭小区域,模型拉花严重,其精度较低,部分成果会超限,需要外业进行补测;激光点云是从地面进行作业,对于狭小区域,其获取的有效数据较倾斜更多,其生产的地籍图精度较高,可以满足地籍精度要求,需要补测的量较小。通过检测结果表明,基于点云采集地籍图精度较倾斜来说,其精度普遍较高。
3 结论
本文首先对倾斜摄影测量技术和激光点云技术进行了介绍,然后通过实际生产项目案例进行数据生产流程分析,对两种作业方式的优缺点进行简单总结。采用检测点对地籍图成果精度进行检测,结果表明:本文提到的两种方法生产的地籍图,其精度可以满足地籍规范相关要求,也可以为房地一体项目生产提供有效参考。
猜你喜欢
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
全球定位系统(2021年1期)2021-03-26
西部交通科技(2021年9期)2021-01-11
山东交通科技(2020年3期)2020-08-05
科学与财富(2018年28期)2018-11-16
北京航空航天大学学报(2017年4期)2017-11-23
科技与创新(2016年22期)2017-03-30
风能(2016年3期)2016-07-05
安全(2015年6期)2016-01-19
