倾斜摄影测量技术在大比例尺地形图测绘中的应用研究
2022-04-20 06:46:44贠亚杰
科学技术创新 2022年10期
贠亚杰
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
摄影测量技术主要用来生产数字正射影像图(DOM)、数字高程模型(DEM)和数字线划图(DLG),其中DLG 的生产目前方法较多,主要可以分为全野外作业和内外业相结合作业[1]。全野外作业主要是指利用全站仪、GPS-RTK 等实地进行坐标测量,然后内业根据外业采集的坐标和手绘的草图,按照实际情况进行地形图的绘制;内外业相结合主要是指内业和外业搭配进行地形图的生产,常见的有两种:一是利用摄影测量的方式进行平面坐标的采集,利用GPS-RTK 进行高程点的采集,然后将两套成果合在一起,得到最终的地形图;二是利用摄影测量技术,在内业得到符合精度要求的地形图,这种方式目前生产的地形图精度参差不齐,很难满足项目要求[2-4]。针对该方式生产的地形图精度低的问题,本文提出采用倾斜摄影技术进行大比例尺地形图的生产,并对成果精度进行检测。结果表明,按照本文方案生产的地形图精度可以满足1:500 地形图精度要求,可以作为大比例尺地形图生产的一种方式进行有效推广使用。
1 倾斜摄影技术
对于测绘工作而言,倾斜摄影技术主要包括倾斜摄影测量技术、倾斜摄影建模软件和倾斜摄影建模技术三部分。
1.1 倾斜摄影测量技术
利用无人机搭载航摄仪,从空中对地面进行拍摄,获取影像数据,用于测绘产品的制作被称为摄影测量技术。摄影测量技术主要分为垂直摄影测量技术和倾斜摄影测量技术,垂直摄影测量是指航摄仪垂直于地面,从上方垂直获取地面影像数据,由于无人机姿态较差,所以在获取数据时,并不是真正的垂直,但是其夹角非常小,一般不超过3°;倾斜摄影测量是指航摄仪从多个角度对地面进行影像数据获取,即在垂直摄影测量的基础上,又增加了倾斜角度,而且通常倾斜角度在45°左右,这样才可以获取角度更全、有用信息更多的影像[5]。
1.2 倾斜摄影建模软件
是指按照一定的算法,对航摄二维影像进行解算,通过一定的算法得到三维实景模型的软件,目前这类软件较多,常见的有美国本特利的ContextCapture(简称CC)、SkyLine 公司的PhotoMesh、上海瞰景科技的Smart3D、北京中测智绘的M3D、大疆公司的大疆智图,根据实际作业可知,这些软件在空三解算和建模时,从模型精细度、解算所耗时长等方面来说,各有利弊,在作业过程中,搭配使用,才能更好地发挥每个软件的作用,提升作业效率。
1.3 倾斜摄影建模技术
倾斜摄影建模理论上来说,只要照片具有一定的重叠度,就可以进行建模,但是测绘是要讲究坐标系和精度的,因此还需要引入POS 数据,POS 中记录了相机在空中曝光时的位置和姿态,由于无人机的不稳定性,因此在实际作业中,对POS 数据进行了舍弃。倾斜摄影建模技术是指通过自动或半自动的技术,借助摄影测量算法,对航摄影像数据进行解算,得到具有三维的,能够按照一定比例尺呈现实际现状的技术。其主要分为航摄影像数据获取、空中三角测量解算和可视化三维模型自动构建三部分,其整个作业流程如图1 所示。

图1 倾斜摄影建模流程
2 案例分析
本次案例来自于我院承接的城区大比例尺地形图更新,要求在已有地形图基础上,对发生变化的区域进行全要素更新。已有地形图是采用RTK 全野外作业获取的,本次作业则采用倾斜摄影技术,目的是通过改变作业方式而提高作业效率,降低生产成本。
2.1 测区概括
项目位于主城区,发生变化的区域主要有住宅区和道路,住宅小区很难进去作业,道路上车辆多,严重影响地形图的更新。测区范围内地势整体平坦,但最高建筑约100 米,存在较大的高差。
2.2 无人机选型
针对高差大这一特点,本次作业为了获取分辨率尽可能相同的影像,采用旋翼机、长焦距、仿地飞行的作业方案。在选择飞机时,根据不同飞机的特点,选用SH-60X 无人机进行作业,该飞机具有续航时间长,稳定性高的特点,最主要的是该飞控支持仿地飞行作业。为了减小影像的畸变,在相机选择的时候,选择下视镜头为35mm,侧视镜头为50mm 的5 拼相机。
2.3 航线规划
航线规划质量的高低直接影响后续的航飞结果,在本次作业中,由于采用的是仿地飞行方案,因此进行了两次航线规划。首先按照常规飞行模式,以低重叠度的设计,采用固定高度的飞行方式获取城区影像,然后利用Pix4D 软件,快速获取任务区的高精度DSM 数据,然后将其导入WPM 软件,按照航向85%、旁向85%的重叠度、地面影像分辨率为0.03 米的要求进行仿地航线的规划。
2.4 控制测量
本次作业未采用差分技术,因此得到的POS 精度较低,为了获得高精度的地形图成果,需要进行控制点的采集。首先将任务区范围线导入图新地球软件,按照300米的间距,结合地形,合理均匀的布设大致点位,然后将其导出,并导入手机端的奥维地球中。外业控制点采集人员,根据奥维地球上的位置,规划采集路线,快速进行控制点位的确定。由于是倾斜摄影,因此对点位的选取是有要求的,要尽可能选在四周空旷的地方,这样可以减小点位的遮挡,提升控制点转刺的个数。在点位选择时,如果无明显的特征点,则可以采用红白油漆进行点位喷涂,然后进行坐标采集,如果有特征点,则可以直接采集在特征点上。在点位采集时,对实际点位进行了远景和近景的拍照,这样便于内业对点位进行快速准确判定。为了减少偶然误差带来的影响,在点位采集时,统一按照每个点位采集3 次,相互较差小于1cm 的要求进行,采集完成后,将成果打包提交到内业。
为了对后期成果精度进行检测,在采集控制点的同时业采集了部分检测点。检测点主要位于整个成果精度薄弱区域。在采集检测点时,采集了两种类型的检测点,即平面检测点和高程检测点,平面检测点全部位于特征点上,共采集了23 个,高程检测点除了23 个平面检测点外,还在地形变化较大区域,采集了15 个高程检测点,即最终为38 个高程检测点。
2.5 航空摄影作业
为了减少阴影遮挡,提升航摄成果质量,本次作业采集影像时,主要选取在上午十点到下午两点这段时间内。首先对起飞和将落地进行选取,然后进行起飞前的检查,主要检查各部件的牢固性、相机是否正常曝光、内存卡是否可以正常读写和电池电量是否达到要求等。在完成一系列的检查和试拍后,并确保周边环境安全,进行无人机的起飞作业。在无人机作业过程中,需要通过地面站对无人机飞行状态进行观察,确保飞机正常作业,并且在可能发生危险时,可通过手控的方式对飞机的飞行状况进行控制。作业过程中,无人机严格按照已有航线进行航飞作业,共获取影像数13585 张。通过人机交互的方式对航摄影像成果进行查看,影像质量良好,未出现曝光严重、阴影遮挡严重等现象,成果可用。对POS 数据进行查看,POS 成果和影像数对应完整,未出现丢POS 值的情况,POS 成果可用。
2.6 实景三维建模
2.6.1 数据预处理
数据预处理主要是为工程创建做准备,预处理主要是更改影像名、对影像进行匀光匀色、整理POS 数据等。由于5 镜头数据,一般每个镜头获取的对应影像名字是相同的,这样不便于进行后期处理,因此需要对影像进行重命名。本次使用拖把更名器对影像进行重命名,重命名后的影像命名都是唯一的。为了提升后期建模成果的质量,这里对影像进行匀光匀色处理。首先选择一张地物信息丰富,具有代表性的影像,加载到PhotoShop 软件中,通过对影像亮度、对比度、色调、饱和度等属性的调节,得到高质量的调色后的影像,并对处理过程进行“动作”记录,然后按照同样的方式,对所有影像进行批处理,得到高质量的原始影像。倾斜相机在作业过程中,其POS 数据是通过下视镜头的相机来记录的,前面对5镜头影像均进行了更名,因此这里需要对POS 数据进行更名,利用查找替换的方式,快速完成POS 数据的更名,至此,工程创建之前的工作就完成了。
2.6.2 工程创建
工程创建主要是指影像数据、POS 数据和相机参数的导入,本次作业采用CC 软件。首先新建工程,设置工程名和任务存放路径,然后通过文件夹的方式,一次性加载所有影像数据和POS 数据,然后将相机报告中的相机焦距,输入到对应相机的位置上,这样可以保证后续数据能够顺利解算成功。在工程创建的过程中,不允许使用特殊符号和中文符号,这样可能会使得后期数据解算出现问题。
2.6.3 空三解算
空三数据的解算,是摄影测量中最关键的一步,因为其结果直接影响到后续的成果。首先提交空三任务,然后在主机和辅机上设置引擎作业路径,最后开启每台电脑上的引擎,通过集群作业的方式提高数据解算效率。在数据解算完成后,对其成果进行查看,POS 和实际航飞轨迹符合,匹配出的结果未分层、未弯曲,成果质量整体良好。设置控制点坐标系统,导入控制点,结合实地照片,对控制点进行转刺,通过目视的方法,对于位于影像边缘的点位不进行转刺,待所有的点转刺完成后,提交平差任务,进行平差调整解算。平差完成后,查看平差报告,所有点位精度均满足测绘精度要求,成果可用。
2.6.4 模型生产
本次生产模型主要用于后期的地形图采集,因此在生产模型时,不需要全部生产,只需生产任务线范围内的即可。首先设置框架系统和空三系统一致,导入建模范围线,然后瓦片切块方式选择平面规则格网,瓦片大小以所有集群电脑内存最小的为标准,本次集群电脑中,内存最小的为24G,因此只需设置瓦片大小为12G左右即可,这样一来,瓦片大小为80m*80m。为了尽可能保留建构筑物结构,在平面简化的时候,选择简化方式单位为“米”,简化数值为“0”,这样就可以保留更多的结构,提高后续采集的精度。实景三维模型格式很多,目前主流的测图软件均支持OSGB 格式的模型,因此输出的模型格式选择OSGB。待集群输出模型完成后,对模型的质量进行查看,主要查看模型是否完整,输出的坐标系是否正确等,通过查看,本次模型成果质量优良,可用性强且精细度良好[6-7]。
2.6.5 地形图生产
本次地形图成果要求为2017 图式,但是已有软件图式为2007,为了得到符合要求的成果,后期需要进行地形图图式的转换。首先利用EPS 软件进行地形图的采集,在采集的过程中,尽可能采集点位准确,对于规则的四边形房屋,可以选用五点房命令进行快速绘制,对于无法准确采集的地方,在地形图上标注明确,外业在进行调绘时会进行补测。采集完成后,利用CASS10 软件,将2007 图式转为2017 图式,并对转换不合适的地方进行查看,得到最终符合要求的地形图。
3 精度统计与分析
成果精度的检测与评定,是测绘作业中至关重要的一个环节。首先利用采集的平面检测点,对地形图成果平面精度进行检测,检测结果见表1。

表1 平面精度检测表
通过表1 可知,本次23 个检测点中,平面较差最大为21.8cm,小于规范要求;按照同精度中误差[8]公式计算可得23 个检测点的平面位置中误差为0.105 米,可以满足大比例尺地形图测绘精度要求。
同理,对38 个高程点精度进行检测,检测结果见图2。
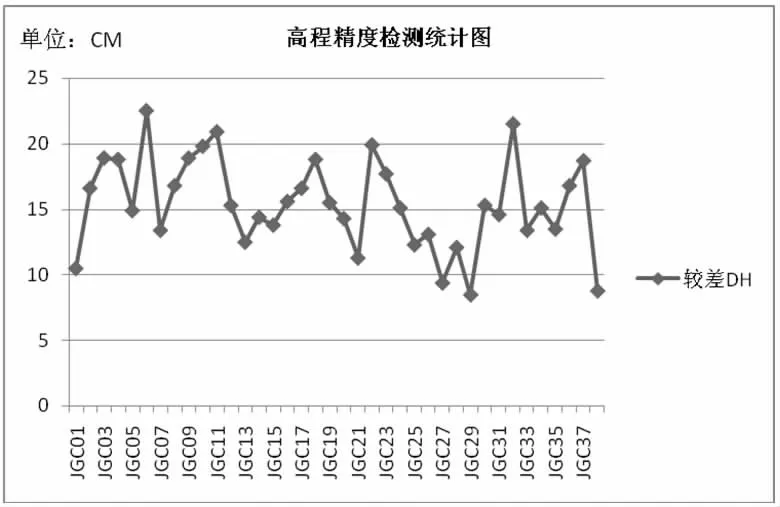
图2 高程精度检测统计图
通过图2 可知,本次38 个高程检测点中,较差最大未超过25cm,多数误差均介于10-20cm 之内,采用算数平均值代替中误差的方法,本次算数平均值为15.4cm,成果精度良好,能够满足本次项目要求。
结束语
城区地形图测绘,是一项非常重要的测绘内容,为了提高作业效率,降低生产成本,在垂直摄影测量无法满足项目需求的情况下,本文提出的倾斜摄影作业方案,可以高质量的完成城区1:500 地形图的生产需求,可以为城区大比例尺地形图测绘生产带来参考。
猜你喜欢
现代苏州(2022年9期)2022-05-26 01:34:49
文萃报·周五版(2022年9期)2022-03-11 00:24:12
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
浙江工业大学学报(社会科学版)(2019年2期)2019-07-08 09:25:22
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
石油化工建设(2017年5期)2018-01-26 07:06:54
照明工程学报(2017年6期)2018-01-10 07:49:36
计算机测量与控制(2017年6期)2017-07-01 16:23:28
中国卫生(2016年2期)2016-11-12 13:22:16