
配电自动化罩式FTU免登杆操作杆的研制
2022-04-19 01:21谭明哲公冶如晶
农村电气化 2022年4期
谭明哲,孔 健,公冶如晶
(国网山东省电力公司曲阜市供电公司,山东 曲阜 273100)
关键字:配电自动化;罩式FTU;免登杆
1 选择课题
馈线自动化终端简称FTU,与柱上断路器配套安装于配电10 kV 线路分段、分支、联络、分界处,具有遥控、遥测、遥信功能,与主站配合用于故障的检测、隔离和自愈,大致可分为罩式和箱式2 种,通常安装于杆塔中段,悬挂离地高度约为3~6 m。
目前县域以及大部分地级市已架空线路为主,为提高配电线路自动化水平,配电线路FTU 数量激增,相关运维工作量大大增加。常见工作包括三遥和离线消缺、更改保护定值、重合闸投退等,均须运维人员登杆连接网线后使用笔记本电脑进行设备参数或定值的修改,此过程中登杆准备及登杆操作过程比较烦琐,且存在高处坠落的风险,登杆操作FTU 须使用脚扣或绝缘梯,杆上人员需要使用全方位安全带,登杆准备及登杆操作过程比较烦琐,且存在高处坠落的风险。通过对日常运维工作的统计,登杆准备过程和登杆、下杆时间占用了85%以上的工作时长。
综上所述,现有罩式FTU 的运维方式存在以下问题:
准备过程较烦琐,占用时间较长,影响作业效率;
作业人员须登杆,耗费体力的同时存在高处跌落风险,在工作量大时尤其凸显;
现场环境复杂,在某些天气或地形下较难或无法登杆,影响工作。
现场工作中,需要一种能够免登杆实现对网口保护罩拆装及网线插拔的辅助工具,以提升工作效率。
2 设定目标及目标可行性论证
通过现状调查分析,工作人员现使用脚扣登杆进行插网线过程平均用时306 s,定值修改结束后拔网线过程平均用时276 s ,拔插总用时582 s,时间主要浪费在全方位安全带的穿戴整理及登杆过程中。小组计划研制一种配电自动化罩式FTU免登杆操作杆,将6 m 以下罩式FTU 的网线插拔过程用时缩减至270 s,即4.5 min 以内。
利用所研制的操作杆,工作人员在地面能完成上述操作,不存在全方位安全带的穿戴整理的过程,不存在使用脚扣登杆的过程,用时会大为减少。利用研制的操作杆进行网线插拔过程总用时理论上可以达到设定目标。
3 提出方案并确定最佳方案
3.1 提出方案
根据课题目标,小组对方案进行初步分析。杆顶抓取装置的结构、材质和驱动方式,杆身结构、控制方式等各因素对装置能否实现目标都有着重要影响。杆顶抓取部分作为该装置的核心部件,小组从其结构和驱动方式上初步提出两种方案,对比如表1 所示。

表1 总体方案对比表
机械式操作杆,高度固定,对于现今3~6 m高度的FTU 的操作,适用性较差,且安全性、可靠性、操作便利性差,电动在开发时具有一定难度,一旦成熟后实用性更高,且具备较大的提升改造空间。所以小组决定选用电动式机械爪作为抓取部件,以其为核心进行操作杆整体的设计。
3.2 方案分解和确定最佳方案
小组初步选定采用电动械爪作为抓取方案,随后小组对方案进一步细分,对操作杆其余组件提出的方案与思路如图1 所示。

图1 方案分解图
3.2.1 驱动方式选择
小组参考现有应用较为广泛的机械爪方案提出2 种驱动方式:电机和气动。电机驱动方案是依靠电动机转子旋转,带动一系列传动装置驱动机械爪进行分合。气动方式是依靠控制电动气泵的气流气量带动气缸动作,进一步驱动机械爪。小组初步拟定了2 种驱动方式的机械爪设计方案并进行定制,实物如图2 所示。

图2 两种驱动方式的机械爪:气动(左)、电动(右)
随后小组对2 种方案的参数、性能进行了一系列测试,得到表2 所示数据。

表2 电动、气动方式参数性能表
由表2 可以看出,在抓取力度相同时,气动式所占空间更大,且比电机驱动式重160 g,增重约28%,但在抓取频率方面有很大优势。
结合数据,两方式主要区别在于自身装置体积重量和抓取频率2 个方面,本次课题目标对机械爪的抓取速率并无太高要求,而为了提升操控性应尽量减轻装置重量。所以,小组最终将驱动方式确定为电机驱动。
3.2.2 抓取装置结构选择
抓取装置须能抓取圆柱状的网口保护帽和网线水晶头2 种形状的物体,抓取保护帽时须有足够抓力以便旋转拆卸,抓取水晶头时须同时按下水晶头侧面卡扣以便拔出网线。小组针对上述要求提出两种方案,即二指和四指机械爪,二指要求行程在同一直线上,四指须程菱形排列且行程沿对角线。
对于两种方案,小组认为二指结构简单易实现,四指结构在抓取力度和稳定性上更优。小组以前期机械爪为基础分别构建二指、四指两种结构,在驱动方式完全相同的情况下进行抓力的测试,结果如表3 所示。

表3 相同驱动方式下2种结构的抓取静摩擦力测试表
通过测试结果可以看出,在保持原有电机、电池的基础上,二指结构的抓取力量较小,甚至不足以进行保护帽的拆卸。若想以二指结构达成目标,需更大更重的电机与电池组,此时相较于四指结构反而降低操控性并增加成本。
同时,小组进行多次实际测试,二指结构精准抓取网口保护帽平均用时为37 s,四指结构抓取平均用时15 s。显然,四指结构更易于操作。
综上所述,四指结构抓力更强,操控性更好。小组在抓取装置结构上最终选定四指结构。
3.2.3 杆身结构的选择
首先,小组对杆身的材质达成了较为一致的意见:选用环氧树脂。原因为环氧树脂坚固耐用重量轻,具备极高的绝缘性能。
对于杆身结构,小组提出了2 种方案:抽拉伸缩式和拼接组装式。
抽拉伸缩式常见于高压验电器,其优点为携带与使用方便,但伸长时末端杆身逐渐变细导致杆身强度降低,会使杆身弯曲、摇晃,严重影响操作。拼接组装式常见于绝缘操作杆,使用前须按照现场情况进行杆身的拼接,相对来说较为烦琐,但在加长后仍能保持杆身强度。
小组对2 种杆身制定了方案如表4 所示。

表4 杆身结构方案
小组认为采用电机驱动方式时,电机、电池、控制板、机械爪将集中整合至杆顶,使杆身末端较重,杆身须具备一定强度来保证操作的顺利。随后小组按照计划使用计算机模拟测试2 种方案的结构强度,测试时按照抓取和驱动装置置于杆顶,重量为600 g,底端杆与地面倾角为60°,以杆身末端与杆身首端夹角作为判断标准,结果如表5 所示。
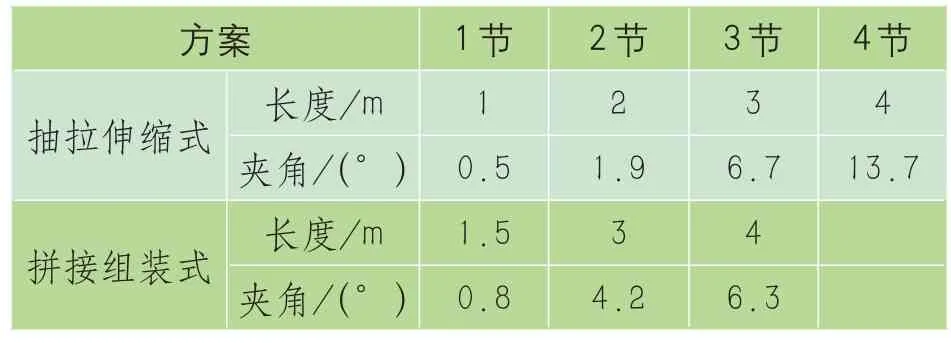
表5 杆身强度测试
对比测试结果,抽拉伸缩式在使用高度增加至3 m 后杆身弯曲程度较大,可预计实际使用过程中存在一定困难,同时抽拉伸缩式在不同高度的使用中杆身重量不变,而拼接组装式则较为灵活。所以小组决定杆身结构选用拼接组装式。
3.2.4 控制方式选择
小组提出有线和红外2 种控制方式。2 种方式的特点如表6 所示。

表6 有线、红外2种控制方式优缺点对比
结合前期杆身结构方案和2 种控制方式特点,小组认为有线方式虽然优点明显,但较难实施,且会破坏杆身绝缘,带来一定安全隐患。红外遥控使用以极为成熟,使用过程中杆身周围基本不会有障碍物阻挡,10 m 遥控距离足够实际工作中应用,也就是说在本课题的应用环境下,红外遥控方式可避免其短板,完全突出其优势。小组最终决定选取红外线方式传输控制信号。
通过对各分解方案的综合评估,最佳方案如图3 所示。
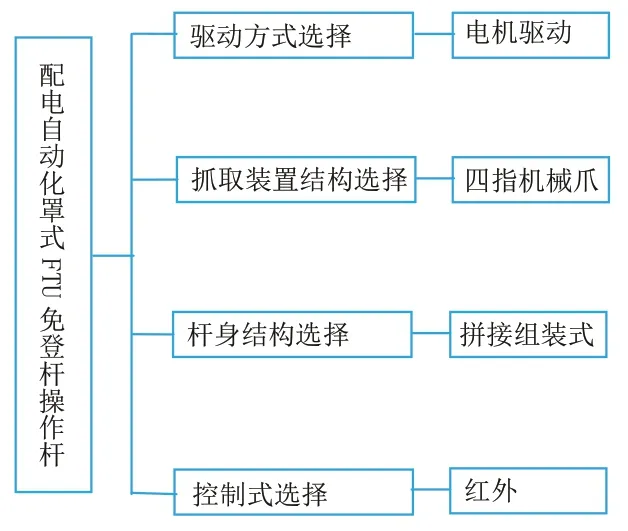
图3 最佳方案图
4 对策实施
4.1 实施一:电动舵机实施
通过多方比对。小组购得一螺纹式步进电机作为舵机,电机配置固定法兰盘,法兰盘能够和电池支架等相连接。电机参数:额定电压为12 V,功率为26 W,步距角1.8°,静扭矩为4.4 kgcm,额定电流为2.0 A,质量为170 g,体积为4.55 cm×4.5 cm×5 cm。
小组进行测量测试,质量体积,静扭矩符合要求,长时间工作无过热现象。符合目标要求。
4.2 实施二:电池组实施
小组购买到12 V,3000 mAh 锂电池组,其预留一个充电接头、一个输出接头,搭配一个充电器。产品到货后小组对其进行充放电测试,验证其容量和保护性能如表7 所示。

表7 电池组放充电测试记录
在两种放电倍率情况下放电,放电时间大于同等容量的电池组的放电时间,证明电池组容量大于3000 mAh,放电电量最大为36.9 Wh大于36 Wh的目标要求,且正常能持续3 A 工作电流输出。符合目标要求
4.3 实施三:遥控模块实施
采购带遥控功能的步进电机控制器。
对到货装置针对性能要求,连接步进电机与锂电池组进行性能测试。测试报告如表8 所示。符合目标要求。

表8 步进电机与锂电池组性能测试
4.4 实施四:四指爪制作实施
设计四指爪3D 图纸,指尖处设有横向防滑纹,目的是在抓取网线水晶头时,增加摩擦力,竖向防滑纹,目的是在拆装网口保护帽时增加横向的摩擦力。利用3D 打印机打印,材质为尼龙。
测试结果:抓取拆卸网口保护帽正常,不打滑,抓取插拔网线水晶头正常,拔插顺畅。符合目标要求。
4.5 实施五:绝缘杆实施
购买4 节绝缘杆,采用卡扣连接,到货后4 节组装测试,卡扣连接牢靠,在施加20 kg 横向扭转力时,绝缘杆无变形。符合目标要求。
4.6 实施六:整体组装调试
制作电机及控制板支架,进行工具前部组装;利用车床制作180 mm×60 mm×2 mm 的铝保护筒,底部利用可调向的转接件与绝缘杆相连;3D 打印遥控器支架,支架放置于操作杆下部,方便操作位置,并能方便上下移动,以适合FTU 高度,方便人手操作。

图4 室内调试
整体调试、现场试验。小组首先于室内进行装置基本性能的调试,确认装置运行正常后于室外实地进行调试,主要测试其使用高度和动作、控制的灵敏度。

图5 现场试验
通过整体检测调试,装置符合设计要求。
5 效果检查
5.1 检查课题目标
为保证测试贴近实际,小组通过现场工作中装置的实际应用情况来进行此次课题的效果检查,以修改保护定值和投退重合闸两项工作作为实例,选取罩式FTU 悬挂高度6 m 以下的工作现场,采样30 次实际作业。应用配电自动化罩式FTU 免登杆操作杆进行操作,网线插拔过程平均用时为230 s,比目标值270 s 快了40 s。小组进一步分析数据,筛选出高度在6 m 以下前期使用常规操作方式的工作数据,网线插拔过程平均用时在523 s。使用罩式FTU 免登杆操作杆,相较于常规方式在网线插拔环节节省了56%的时间。小组成功实现了活动目标。
5.2 效益分析
在进行配电自动化运维过程中,使用配电自动化罩式FTU 免登杆操作杆可节省一定的人力成本。此操作杆操作难度低、无上手门槛,可一定程度上节省雇佣外委登杆人员的经费。工作人员可免于登杆,无高处跌落风险,减少登杆过程中的磕碰、擦伤等风险,减轻作业人员在高温天气下的体力消耗,减少中暑风险。此装置投入运用后可提高配电自动化运维效率,缩短工时,利于加强配网自动化的整体水平,保障配电线路安全平稳运行,为公司赢得良好的社会效益。
猜你喜欢
防爆电机(2022年3期)2022-06-17
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
房地产导刊(2020年11期)2020-12-28
当代陕西(2019年8期)2019-05-09
检察风云(2016年3期)2016-03-12
印刷技术·数字印艺(2014年1期)2014-02-20
