
基于GeoEye-1和WorldView-2遥感数据的浅海水深反演比较研究
2022-04-18 10:16:56陆天启吴志芳任潇洒姚慧敏邵长高
海洋学报 2022年4期
陆天启,吴志芳,任潇洒,姚慧敏,邵长高
( 1. 广州海洋地质调查局 自然资源部海底矿产资源重点实验室,广东 广州 510075;2. 广州海洋地质调查局 三亚南海地质研究所,海南 三亚 572025;3. 中国地质调查局南海地质科学院,海南 三亚 572025;4. 仲恺农业工程学院 信息科学与技术学院,广东 广州 510225;5. 航天宏图信息技术股份有限公司,北京 100195)
1 引言
浅海水深是海岸环境的重要参数,其对于海洋运输、海岸带管理以及珊瑚礁生态保护等方面具有极其重要的意义[1]。船载声呐测量和机载激光雷达测量等手段可以获得准确的水深数据[2],但因其存在耗时耗力、成本高昂以及覆盖面有限等缺点[3-4],使得这类方法有一定的局限性。相比之下,遥感技术具有成本低、覆盖面广、动态监测以及较高的空间、时间分辨率等多方面优势[5],特别是在浅海和偏远的海域,已经成为传统水深测量的有效补充手段。
半经验半理论模型是目前常用的水深反演方法。基于水体散射的水深反演模型,经过简化后只需回归两个经验参数即可建立辐射亮度与水深之间的数据关系式,这就是经典的单波段水深反演模型[6]。通过假设不同波段在不同底质类型上的反射率比值不变,可建立双波段水深反演模型,进而可以推广出多波段模型[7]。在此基础上,波段比值模型得以发展,在反演大范围的水深时,波段比值模型更加稳定且探测范围更深[8]。上述方法均为半经验半理论模型,因其具有一定的物理意义和计算简便的优点而被广泛应用[9-10]。
多光谱遥感数据因具有较高的空间分辨率而被广泛地应用在浅海水深反演领域。基于Landsat-TM数据,Liceaga-Correa和Euan-Avila[11]分析了主成分分析、多元线性回归等4种水深反演方法在珊瑚礁系统中的绝对误差。利用波段比值模型,Lu等[12]比较了Landsat-8、SPOT-6和WorldView-2 3种遥感数据在南海东锣岛海域的水深反演精度。基于多时相的WorldView-2和Landsat-8数据,Liu等[13]构建了自适应的水深分段反演模型,提高了水深反演的精度。此外,利用WorldView-3、Planet、Sentinel-2、“高分一号”等多光谱遥感数据在水深反演研究中也都取得了较好的效果[1,14-19]。GeoEye-1和WorldView-2作为当前国际上空间分辨率较高的两种遥感数据,是多光谱遥感反演水深的常用数据源,但目前还未见对GeoEye-1和WorldView-2在同一海域水深反演能力的研究。
基于GeoEye-1和WorldView-2高分辨率遥感数据和水深实测数据,本文以南海西沙群岛的羚羊礁海域为研究区,分别建立单波段模型、多波段模型和波段比值模型,选取精度最高的模型进行水深反演。在此基础上,比较分析GeoEye-1和WorldView-2遥感数据在不同水深范围内的反演精度,为我国热带岛礁海域的浅海水深反演工作提供参考。
2 研究区及数据
2.1 研究区
研究区选取南海的羚羊礁海域,羚羊礁位于南海西沙群岛核心区永乐环礁的西南部,隶属于海南省三沙市,其经纬度范围为16°26′~16°30′N,111°34′~111°37′E(图1),为热带季风气候。羚羊礁海域被珊瑚礁、海沙和水下植被覆盖,因海域远离大陆,受人类直接影响小,海域水体符合一类水体标准,光可穿透性强,是遥感反演水深的理想区域。
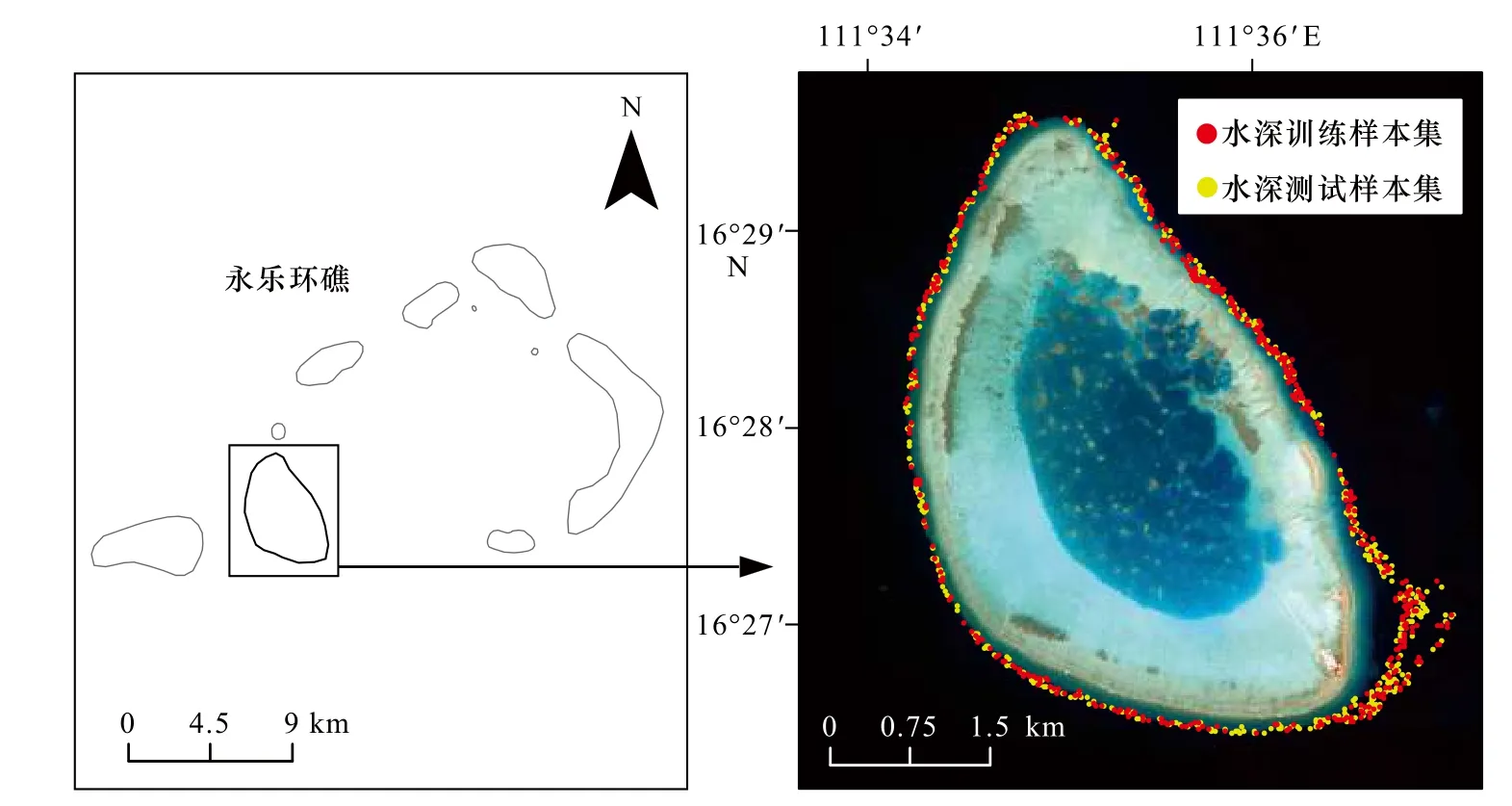
图1 研究区及水深实测点Fig. 1 Study area and measured points
2.2 数据
研究使用的数据为美国的GeoEye-1和World-View-2遥感影像数据,GeoEye-1和WorldView-2数据均为当前世界上分辨率较高的商业遥感卫星数据,有关卫星数据的获取时间、波长范围及空间分辨率见表1。选取两种数据波长范围对应的波段进行后续的对比分析,具体为GeoEye-1的波段1、波段2、波段3、波段4与WorldView-2的波段2、波段3、波段5、波段7。
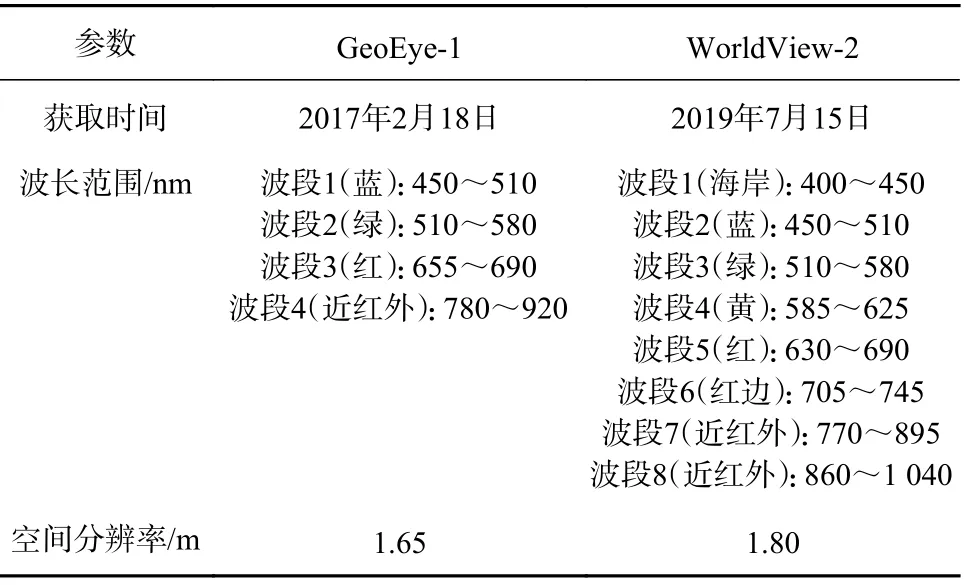
表1 遥感卫星数据参数Table 1 Remote sensing satellite data parameters
水深实测数据使用的是广州海洋地质调查局于2019年9月利用美国Teledyne T20P型多波束测深系统获取的水深数据,格网分辨率为20 m。由于羚羊礁海域的地质环境稳定[20],且使用的影像获取时间与水深实测数据获取的时间接近,水深在一定时间范围内变化较小,故可以适用。根据光学遥感探测水深的能力,本文筛选出羚羊礁周围0~30 m的水深实测点,并使用ArcGIS子集要素工具将其分为训练样本集和测试样本集(图1),其中,训练样本集样本440个,用来建立水深反演模型,测试样本集样本430个,用来分析水深反演精度。
3 数据处理
3.1 数据预处理
通常遥感影像是以像元亮度值(Digital Number,DN)的形式表现,像元亮度值是一个无量纲的整数。利用像元亮度值只能进行同景影像的相对比较,若要进行不同传感器影像之间的定量比较和应用分析,同时一定程度上消除传感器带来的误差,就需要进行辐射定标。本文采用绝对辐射定标,定标所需参数从影像的IMD(Image Metadata)定标文件中获取。而后需要通过大气校正的方法消除传感器接收到的大气等信息。基于MODTRAN 4+辐射传输模型的FLAASH(Fast Line-of-Sight Atmospheric Analysis of Spectral Hypercubes)大气校正方法,可以有效消除大气和光照等因素对地物反射的影响,其适用的范围可从可见光至近红外及短波红外[21]。本文使用ENVI(the Environment for Visualizing Images)中的FLAASH大气校正模型实现对GeoEye-1和WorldView-2影像的大气校正,任意选取浅海中的一点,其校正前后的光谱曲线如图2所示。
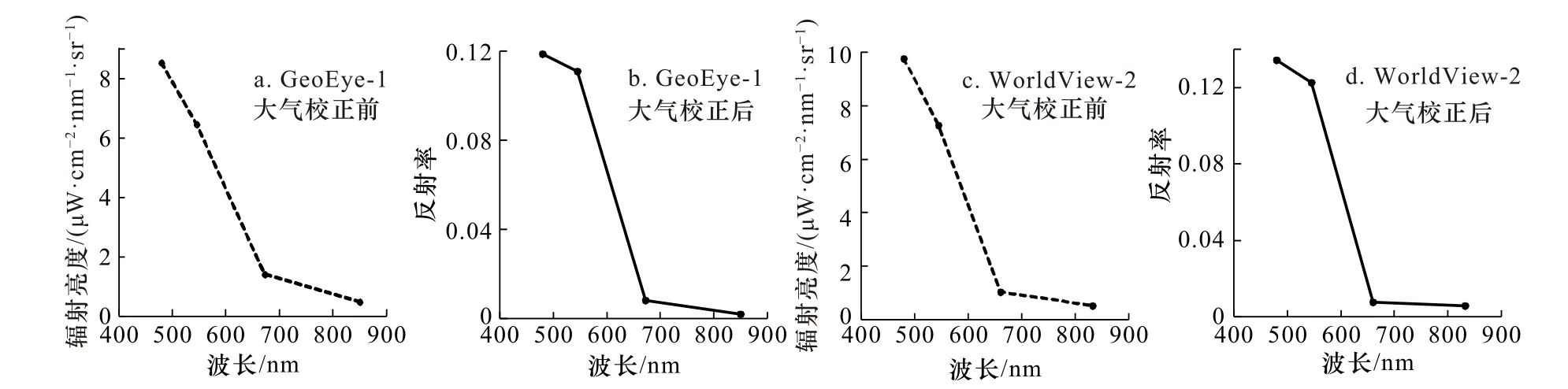
图2 大气校正前后光谱曲线Fig. 2 Spectral curves before and after atmospheric correction
为了使两种不同探测器获取的遥感影像在空间上能够完全匹配,在由数据处理部门进行初步的几何校正后,仍需进一步做几何精校正。本文在两幅影像上各选取分布均匀的30个地面控制点,通过与同区域的谷歌影像对比进行几何精校正。
3.2 潮汐校正
海水的瞬时潮位随着时间的变化不断地涨落,而水深数据采集时间与遥感影像获取时间不同,因此,为了保证影像获取时刻的实际水深值与水深测量值之间的一致性,需要对水深测量值进行潮汐校正。根据潮汐表(https://tides4fishing.com/as/china),获取GeoEye-1和WorldView-2成像时刻的潮高分别为0.65 m和1.74 m,同时将水深测量值转换至潮高基准面,则影像成像时刻的实际水深值为转换后的水深测量值加上对应的潮高。
4 水深反演模型
根据布格尔定理可知,光辐射通量随着水深的变化呈指数规律衰减[22]。考虑到这一特性,水体表面反射率Rn可简化为

式中,Rwn为第n波段的水体反射率;αn为常量,与太阳辐射、太阳入射角和水体透过率等因素有关;Rbn为第n波段的水底反射率;f为几何光程长度,一般情况下取常数值2;kn为水体的衰减系数;Z为水深值。公式(1)是传统遥感水深反演常用的模型基础,根据其可以推导出单波段模型、多波段模型和波段比值模型等多种水深反演模型[23]。
1)单波段模型
将公式(1)进行对数运算,可得:

假设海底底质反射率为常数,同时,大气、海况和光学背景的影响相同,水体的衰减系数也为常数,令A=ln(αnRbn)/fkn,A1=-1/fkn,Xn=Rn-Rwn,则公式(2)可简化为单波段模型的形式:

式中,Xn为第n波段的反射率。
2)多波段模型
不同类型的水体具有不同的底质反射率和衰减系数,而通过不同波段比值的形式可以一定程度上消除这些差异[7],多波段模型在此基础上得以发展。假设两个波段(例如波段1和波段2)在不同的底质类型上反射率比值保持不变,即为常数,则通过对两个不同波段对应的公式(1)进行比值运算,可得:

令Xn=ln(Rn-Rwn),并按照与单波段模型相似的推导方法,可得到双波段模型公式:

将双波段模型进行推广,可得到多波段模型公式:

式中,An为第n波段的系数。
3)波段比值模型
波段比值模型的假设条件与多波段模型相同,即水底反射率比值不受底质类型的影响。同样地,将两个不同波段对应的公式(1)进行比值运算得到公式(4),令公式(4)中Xn=Rn-Rwn,则可得到波段比值模型公式:

5 水深遥感反演
5.1 水深反演模型建立
在水深反演的过程中,水深反演模型的选取直接决定着反演精度的高低。本文基于GeoEye-1和World View-2的蓝波段、绿波段、红波段和近红外波段,根据单波段模型、多波段模型和波段比值模型3种模型的基本形式,逐一建立波段(波段组合)与水深训练样本集之间的拟合公式,并计算了其对应的决定系数(表2)。
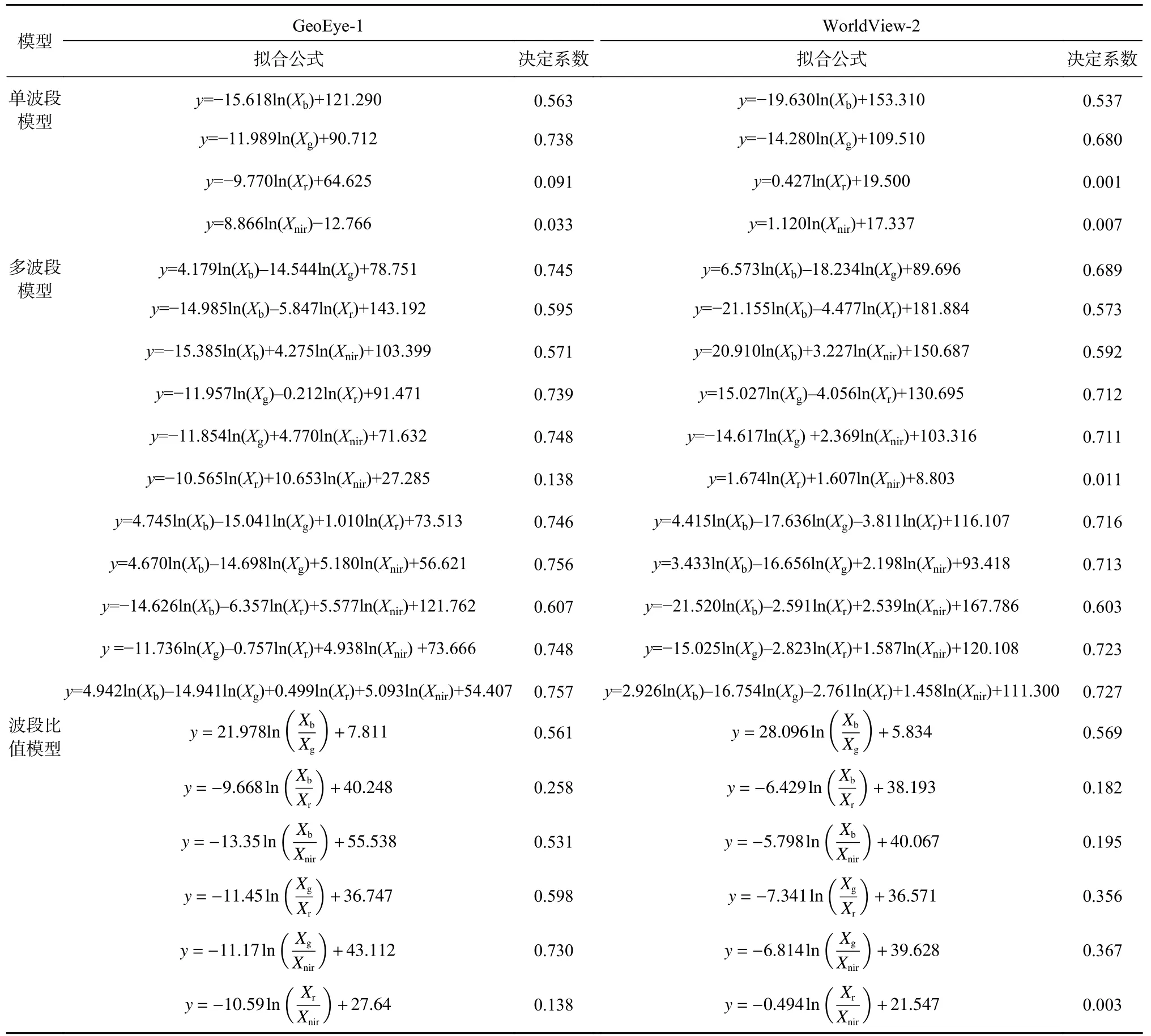
表2 水深反演模型及其决定系数Table 2 Water depth inversion model and its determination coefficients
根据表2中的决定系数进一步计算不同波段(波段组合)与水深之间的皮尔逊相关系数(图3)。从图3中可看出,在利用两种遥感影像和实测值所建立的水深反演模型中,不同波段(波段组合)与水深的相关性差异较大。由绿波段参与建立模型的相关系数普遍较高,其中,由GeoEye-1绿波段参与建立模型的相关系数均达到了0.749以上,9个模型达到了0.850以上,由WorldView-2绿波段参与建立模型的相关系数均达到了0.597以上,2个模型达到了0.850以上。相比于单波段模型和波段比值模型,多波段模型的相关系数整体较高,其中使用4个波段建立的多波段模型拟合度最高(图4),其皮尔逊相关系数分别到达了0.870和0.853,因此,选用4个波段建立的多波段模型作为水深反演的最终模型。
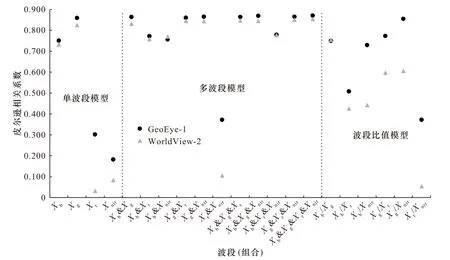
图3 不同波段(波段组合)与水深的相关系数Fig. 3 Different bands (band combinations) and their correlation coefficients with water depth
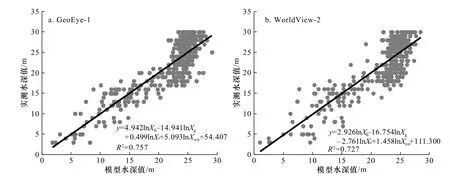
图4 4个波段建立的多波段模型水深值与实测水深值散点图Fig. 4 Scatter plots of multi-band model water depth value and measured water depth value established by four bands
5.2 水深反演结果
分别将GeoEye-1和WorldView-2处理后的数据带入到4个波段建立的多波段模型中,计算后以水深5 m为间隔显示其反演结果,如图5所示。
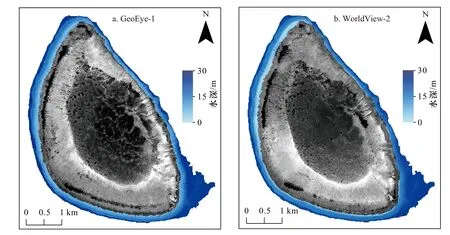
图5 水深反演结果Fig. 5 Water depth inversion results
5.3 精度评价与分析
本文采取平均相对误差和均方根误差两种指标来衡量水深反演结果的精度,其中,平均相对误差(Mean Relative Error, MRE)为

均方根误差( Root Mean Square Error, RMSE)为
式中,n为水深测试集的点总数量;xobs,i为第i个点的实际水深值;xmodel,i为第i个点的反演水深值。
分别计算GeoEye-1和WorldView-2反演结果与水深测试样本集在不同水深范围内的平均相对误差和均方根误差(表3)。从表3中可看出,在任意水深范围内,WorldView-2反演结果的平均相对误差和均方根误差均小于GeoEye-1反演结果的误差。平均相对误差最大值均在0~5 m水深范围内,分别为23.43%和19.56%,其主要原因是该水深范围处于海浪破碎带,海水表面的粗糙度大,同时波浪破碎带的悬浮泥沙浓度较高[24],水体的光学衰减系数较大,导致可探测深度小,增大了反演误差。而均方根误差最大值均在25~30 m水深范围内,分别为3.79 m和2.94 m。同时,整体来看,WorldView-2反演的平均相对误差(10.40%)小于GeoEye-1的平均相对误差(12.58%)以及其均方根误差(2.53 m)也小于GeoEye-1的均方根误差(2.70 m)。因此,总体而言,WorldView-2影像在研究区的水深反演能力要强于GeoEye-1影像。
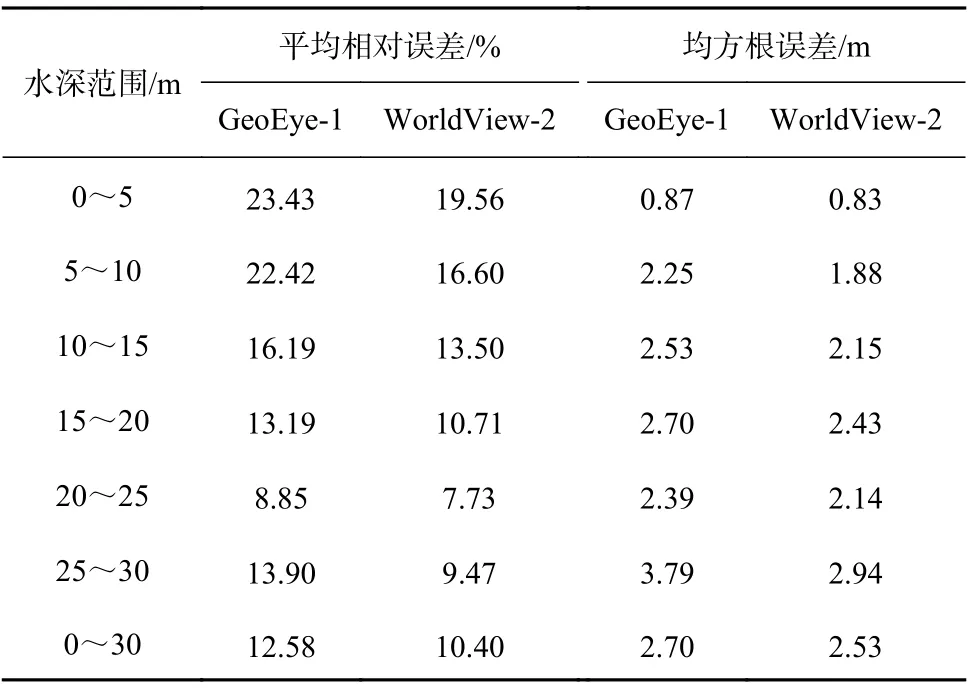
表3 不同水深范围的反演误差Table 3 Inversion error of different depth ranges
与此同时,两种数据反演结果的误差在不同水深范围内的变化具有一致性(图6)。在0~25 m水深范围内,平均相对误差随着水深的增大呈减小趋势,在20~25 m范围内达到最低值,而后在25~30 m范围内有增大趋势(图5a),这表明两种数据均在20~25 m水深范围内具有较高的反演精度。另一方面,随着水深的增加,两种数据反演结果的均方根误差整体上呈增大趋势,但与平均相对误差变化的趋势相同,在20~25 m水深范围内出现了拐点(图5b),这说明该水深范围内的海水状况更加稳定,更适宜水深反演模型的应用。
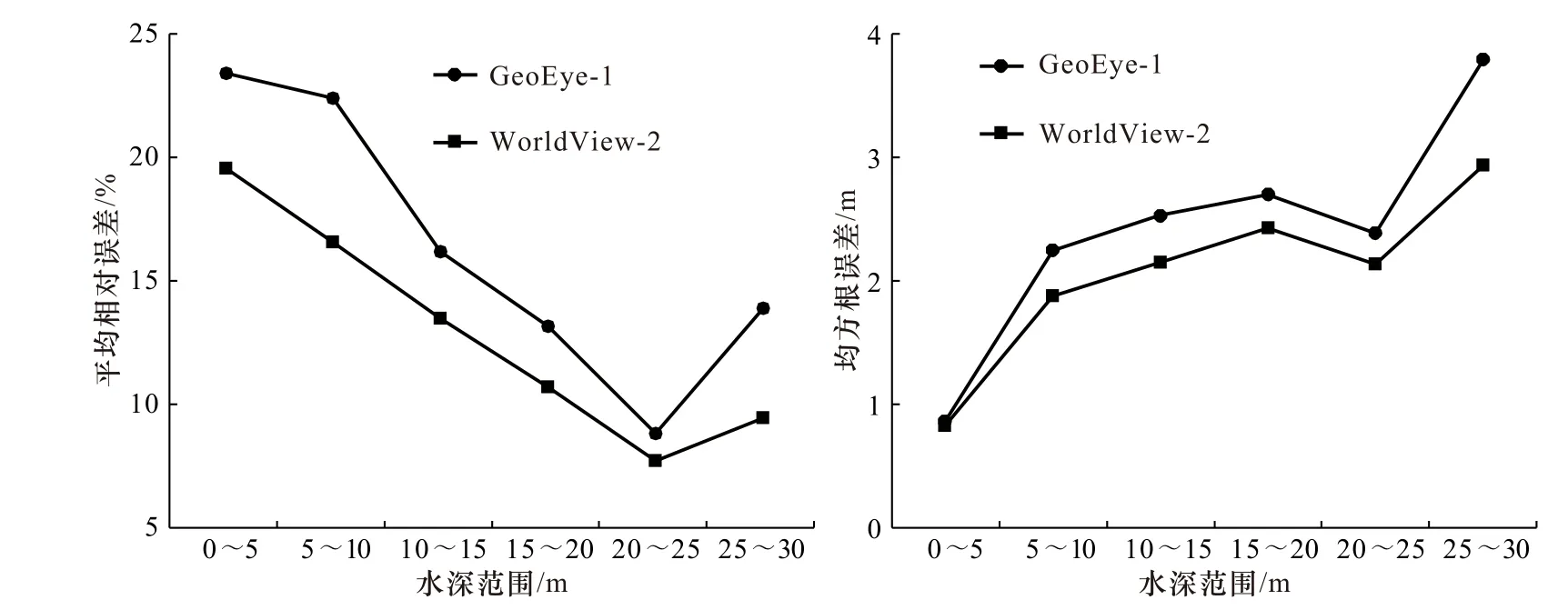
图6 水深反演误差变化趋势Fig. 6 Variation trend of depth inversion error
6 结论
本文分别基于GeoEye-1和WorldView-2高分辨遥感数据及实测水深值,建立了4个波段的单波段模型、多波段模型和波段比值模型,分别选取相关性最高的模型反演了羚羊礁浅海海域的水深,并分析比较了两种数据在不同水深范围内的反演精度,得到以下结论:
(1)不同波段建立的水深反演模型差异较大,而由绿波段参与建立的模型相关性较高。同时,多波段模型整体上优于单波段模型和波段比值模型,特别是4个波段组合建立的多波段模型在本研究区效果最佳。
(2)GeoEye-1和WorldView-2影像的反演误差在不同水深范围内的变化趋势具有一致性,其平均相对误差均在0~5 m水深范围内最大,而在20~25 m水深范围内最小。随着水深的增加,两种数据反演结果的均方根误差整体上呈增大趋势。
(3)WorldView-2数据在不同水深范围内反演结果的平均相对误差和均方根误差均小于GeoEye-1数据的反演结果,因此,WorldView-2影像反演水深的精度高于GeoEye-1影像的反演精度,这对于在热带浅海水深反演数据源的选取有一定的参考意义。
羚羊礁浅海海域大多被珊瑚礁覆盖,底质类型较为均一,这是本文应用水深反演模型的前提条件,但严格意义上,研究区的底质类型是变化的,该海域底质类型变化对反演精度的影响是下一步研究的方向。另外,研究结果表明,该海域在20~25 m水深范围内具有最高的反演精度,影响该水深范围反演精度的因素也亟待研究,这对于提高其他水深范围的反演精度具有重要意义。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
自动化学报(2017年2期)2017-04-04 05:14:28
高师理科学刊(2016年8期)2016-06-15 20:27:45
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
西藏科技(2015年4期)2015-09-26 12:12:58
浙江国土资源(2015年4期)2015-05-09 08:43:59
新高考·高二数学(2014年7期)2014-09-18 17:20:45
