基于无人机的无线电监测定位效率提升研究
2022-04-18 10:00熊仁和
计算机仿真 2022年3期
周 超,王 耀,熊仁和,肖 俊
(1. 中国民用航空飞行学院飞行技术与飞行安全重点实验室,四川 广汉 618307;2. 中国民用航空飞行学院空中交通管理学院,四川 广汉 618307)
1 引言
随着国家全面开启社会主义现代化强国建设,民用航空的发展一直发挥着基础性、先导性的作用。2021年3月12日民航局学习贯彻2021年两会精神时明确提出:要着力构建一流的民航安全体系,树立民航总体安全观。但随着不合法无线电频率的乱用,造成民航专用频率受无线电干扰事件频发,且在全国具有普遍性。仅华东空管局在2015年至2019年收到的干扰报告次数均在300起以上,其中空中干扰比例占半数以上,这是因为地面干扰源直射波更易影响空中的飞机[1]。民航无线电通信、导航和监视设备是飞行安全的保障,一旦这些设备的专用频率受到干扰,可能会造成飞机与地面通话中断、雷达失效、导航信号失真、严重时将造成通信设备主备机同时失效,将会直接影响民航安全体系的构建[2-3]。
目前国家传统的无线电监测及干扰定位方法一般采用地面布设监测站,由多个监测站通过对干扰信号进行测向,交叉定位地面干扰源的大致位置,然后派出移动监测车在可疑区域通过测向,逐渐逼近干扰源。但这种方式排查周期长,不能及时排查并拆除干扰源[4]。利用小型载人飞机、直升机平台监测无线电干扰,可以快速准确的定位干扰源,但是又存在审批流程复杂、空域受限、成飞成本高等问题,而利用无人机作为空中无线电监测平台,不仅便于接收干扰源的直射波,并且具有成本低、控制简单、高机动性和高扩展性等诸多优势。
现有的大多数无人机监测系统中,无线电监测与无人机控制功能分散,机载端与地面端使用多条链路传输显示,成熟产品的交互性弱使得定位效率不高[5]。本文基于大疆六旋翼无人机的稳定性和扩展性,利用机载端SDK(Software Development Kit)实现飞行控制与测向系统数据处理,用地面端SDK实现航线规划、测向数据可视化等功能[6-9]。同时为了提升定位精度,仿真分析观测点的选定对于实际航线规划中提高定位精度的理论意义,实际测试对比两种基线数据处理方法,验证系统在便捷性、定位效率方面的优越性。
2 系统框架设计
为降低无人机负载、解决空中监测系统新增数据传输链路影响本身链路的电磁抗干扰能力、解决无线电干扰监测数据不能自动解码在电子地图显示等问题,以保证飞行平台足够可靠、数据采集简单高效、监测定位过程自动化为原则对整体系统进行模块化设计,结构框图如图1所示。

图1 系统整体方案图
考虑监测任务的稳定性和负载续航,选择大疆M600pro旋翼无人机作为飞行监测平台。同时考虑频段、增益、尺寸和重量、精度等空中监测系统所需的性能指标,定制机载测向系统进行以满足对便携性、可用性 、低成本高精度、模块化设计的要求。监测数据满足链路传输协议及通信带宽要求,地面移动控制站实现飞行任务与干扰数据的同步监视控制。
3 航线规划策略
无人机平台在空中灵活性高、接收到的信号路径损耗低,能在不同方向、高度通过监测信号功率值与无人机航向获取不同位置的来波信号方位,经过地面站软件将观测点对应方向线交汇,便得到估计的目标位置区域。将无人机看作移动站点,定位过程抽象成二维平面下的交叉定位模型,由于设备系统误差和噪声干扰,由多点交叉定位原理得出的目标位置总是落在一个区域[10]。该区域越小则证明定位的精度越高,示意图如图2所示。
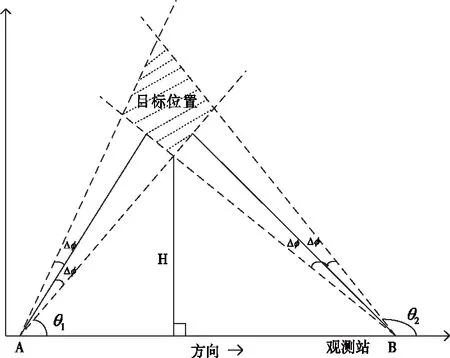
图2 定位模糊区定义
设该区域面积为S,系统在不同观测点A、B硬件状态相同,则它们的测量误差是相等的,默认设备误差值△Φ一致,定位模糊区S的表达式[11]

(1)
其中H为目标位置与观测基线距离,△Φ为测量误差,θ1、θ2为示向角。为使建模方便,将定位模糊区表达式简化为
(2)
由上式可知在H不变情况下,当分母K越大,对应S越小。对K求极大值,可通过求偏导建立K与θ1、θ2关系表达式:
(3)
(4)
由上述推导公式建立θ1、θ2与K值的Matlab关系模型,仿真结果如图3所示。

图3 使模糊区最小的方位值间关系
从图中观察到当θ1取样本值为60°时,θ2取值120°时对应的K值最大,进而判断出当目标区域与观测线距离一定时,两个观测点与干扰源刚好围成等边三角形布局,计算得到的模糊区面积S最小,定位精度相对最高。
无人机的实际飞行航线,采用弧形轨迹能以较少连续观测点获取足够多的有效监测值,结合仿真结果选择使示向线为60°交汇点作为有效区域边界估计位置目标点,多组有效目标点构成的区域将会比粗定位区域小。例如图4中红色交汇点T1点和绿色交汇点T2,挑选出三组及以上的相交点可构成缩小后的定位模糊区,将多组有效数据值算术平均后可达到减小与真实位置相对误差的目的。

图4 航线规划示意图
4 基于SDK二次开发的功能实现
为了完成设计目标,针对空中监测系统的测向数据对地传输、地面控制端实时监控、定位无线电干扰源等使用需求,利用大疆SDK二次开发设计解决方案。
4.1 机载SDK开发
考虑到测向数据的处理和通信交互不会耗费太多计算资源,采用嵌入式系统(Onboard Embedded System,OES)STM32开发板作为硬件载体的开发平台,同时将开发板作为中继与无人机、传感器PC连接。
OES与飞控双向通信,需要遵循固定的通信协议,将指令信息转换成固定的协议帧,通过串行接口进行传输,前者发送包含请求操作的CMD数据包,后者用确认或拒绝CMD的ACK包进行回复。数据传输控制使用SDK框架中的API,指令调用API的驱动控制过程如图5。
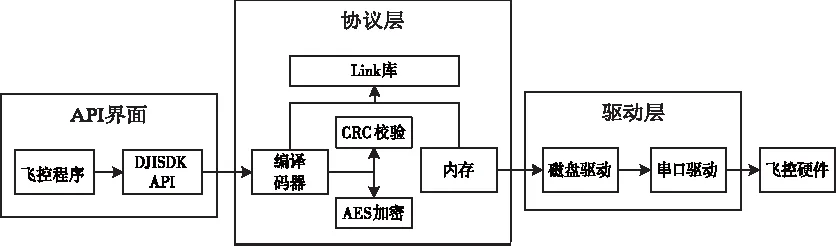
图5 API调用原理
机载SDK(Onboard SDK,OSDK)开发中常用串行通信进行数据传输,使能合适的串口,调用相关函数,设置复用器映射等步骤来完成串口数据传输。此外为了提高OSDK程序的安全性,采用广播与订阅机制。要想使机载计算机控制无人机,飞控还需与外部设备完成硬件同步。
4.2 OSDK控制方案
OSDK控制飞行具备延时极低、闭环控制、状态自稳等优点,因此可与监视应用的航线规划结合实现交叉定位,以周期性偏转角控制的直线方式进行航线规划并在观测点完成数据记录。OES在收到航线规划的指令后,解析数据包利用航点任务规划类的接口控制无人机执行指定任务,其触发器与执行器设计原理为:触发器选择航点到位触发,经循环反馈产生期望速度;执行器的参数设计包括设定周期及信号幅值阈值,以便判定有效干扰数据。周期获取有效位置信息、姿态角信息、方位角信息并实时存储,在判定数据量达到设定条件后经过定位解算和均值滤波得到较精确的GCJ-02(火星)坐标系下的目标位置信息。
4.3 SDK通信
本监测系统需要在稳定飞行过程中实时监测无人机状态参数和无线电测向数据信息,将OSDK获取的数据实时融入下行遥测链路,因此需设计机载端与地面端SDK的通信通道,实现机载端处理后的有效监测数据能在移动设备端显示,完成对无线电干扰源的定位显示。
机载端与移动端应用程序间的数据通信基于数据透传技术实现,指的是程序应用层将数据以缓冲区存储的形式调用底层硬件驱动去输送,底层硬件驱动只保证缓冲区的数据发送,而不关心缓冲区内数据类型,不用去解析缓冲区的具体内容。飞行平台为通信中介,建立机载端和移动端数据传输的双向无线链路通道,机载端OSDK设计为服务器端,移动端MSDK设计为客户端。两端通信程序的通用启动流程如图6所示。
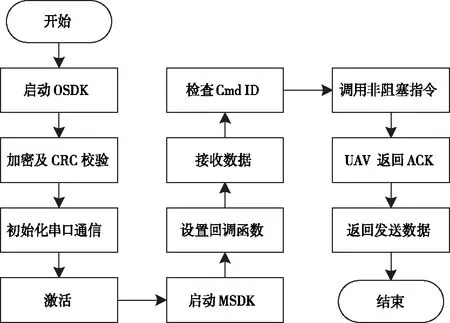
图6 SDK通信代码运行流程
4.4 数据监视应用设计
监视应用由Mobile SDK(MSDK)与Android库提供内核支持,其中利用SDK框架如:SDK管理类、产品类、部件类、航点任务类、航点任务控制类等完成大疆地面站的任务执行模块;利用Android程序开发,设计应用界面、控制逻辑实现与用户交互;利用界面资源库(UX SDK)提供一些通用标签用于在主界面显示无人机状态信息,自定义布局通过将UI组件绑定对应的API类可通过标签实现起降返航、状态告警等功能。
使用高德SDK访问地图数据,将Android设备获取的位置信息展示在高德的定位图层,采用地图纠偏算法可将地图上的位置信息转换为需要的标准经纬信息。智能飞行需要航线规划,用Waypoint类配置航线中的航点,并统一设置航点动作,包括到达航点后的动作、朝向、速度、悬停时间等,Waypoint类设置的航点参数配置,优先级高于组合航点类设置。
智能飞行的任务模块开发包括无人机定位、航点添加/清除、航点参数设置、任务上传、开始/结束任务等几个主要功能,将这些功能与对应按钮绑定与地图一同显示在主界面上,并为所有功能设置对应的监听器。执行监测任务时,点击地图将会调用航点标记功能,记录标记对象的经纬信息并传入标记列表;选择好航点后,配置相对起飞点高度、速度、到达航点后的动作、朝向、旋转动作,目的在于使天线可以收集到有效的监测数据。
二次开发后的运行界面如图7所示。

图7 SDK二次开发系统监视定位过程截图
5 系统测试与分析
通过上述设计和开发,将主要的机载设备集成到无人机上,测向系统与接收机固定,测向天线与机头方向保持一致,三度冗余飞控与导航模块呈前向三角形排列,地面部分主要是运行MSDK的移动设备与遥控器,遥控器内置天线与解码器,并有多个USB接口可以连接移动设备,搭建完成的空中无线电监测系统如图8所示。

图8 空中无线电监测系统图
在测试过程中,采用2.4G频段的信号发生器为模拟干扰源。在安全区域内,将干扰源放置在楼顶,控制无人机与干扰源在同一高度,对无人机进行航线规划,使其沿弧线监测干扰源,选择相邻观测点示向线交汇点数据与60°角示向线交汇点、理论计算的干扰源位置和实际干扰源位置的数据对比。对于示向线交汇的定位数据如表1所示,因为有定位模糊区,将区顶坐标归一化求平均得到60°角示向线交汇点的经纬高坐标(104.303031,30.949112,463.096),相邻示向线交汇经纬高坐标(104.303097,30.948793,464.05);理论计算值的定位坐标,是以5次有效方位与位置数据计算均值为一组有效观测数据,两组有效数据计算求得计算估计的经纬高坐标(104.303725,30.948684,461.96);实际放置干扰源的经纬高坐标为(104.302741,30.949314,421.92),这些经纬高坐标在地图上的显示,如图9所示。

图9 地图上的4个目标点差距

表1 部分定位数据
由图中位置可以看出,以60°示向线交汇得到的归一化估计值与真实值距离最近,验证了理论改进航线规划的可行性;相邻示向线交汇点的归一化估计值定位精度一般;仅靠有效观测值经理论模型解算的估计坐标定位精度较差。此外MSDK监视应用能较快速可视化定位估计位置,且通过合理选择有效估计值能得到较好的定位精度,基本能实现在可接受的工作时间和误差范围内完成测向定位任务,相比于人根据监测数据判断方向的基线法,基于SDK开发的系统更智能、更准确,具有一定的实用价值。
6 结束语
本文以现有的空中无线电监测定位系统为基础,通过SDK二次开发集成了机载端系统,并设计便携应用控制显示,该移动端系统具备SDK通信控制、状态显示、航线规划、监测数据可视化、目标位置解算等功能。实际测试结果表明基于SDK开发的无线电监测系统利用航线规划选择合适的监测位置可以提高定位效率。总之,该系统不仅提高了空中排查干扰源准确性,还使得排查过程更为简便和自动化,具有一定的实际应用价值。进一步的改进方案可以考虑使用高性能传输设备,更换测向体制和定位方式等可能将会更准确的定位干扰源的位置。
猜你喜欢
金桥(2021年5期)2021-07-28
重庆与世界(2020年1期)2020-02-18
人民交通(2018年6期)2018-07-31
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
杂文选刊(2018年1期)2018-01-09
科技创新导报(2016年30期)2017-03-15
科技与创新(2016年11期)2016-06-28
科教导刊·电子版(2016年15期)2016-06-25
数字技术与应用(2014年12期)2015-05-04