基于Edline线特征的既有道路中公交专用车道划分方法
2022-04-12 08:30:48谢惠静
自动化技术与应用 2022年3期
谢惠静
(广西壮族自治区城乡规划设计院,广西 南宁 530022)
1 引言
随着社会经济、技术以及人们生活水平的日益提升,各种机动车数量飞速增加[1-2],城市既有道路中公交车与其他机动车的混合同行,导致交通安全受到威胁。交通运输问题也日益显著,利用现代化管理方法实现交通管理也迫在眉睫。
车道线划分是智能车辆视觉导航系统[3]最基本以及最重要的性能,相关学者重点针对方面的内容进行研究,例如傅筱白等人通过方向纹理特征计算初始道路中心点,通过中心点先验以及观测信息迭代跟踪确定道路中心点,有效实现专用车道划分[4]。王会峰等人根据对车道线图像基本特征的分析,采集三个角度的特殊环境道路偏振图像,根据得到的偏振度图像,对其进行二值化以及图像感兴趣区域进行提取,通过车道线边缘的直线特征,实现专用车道划分[5]。以上方法虽然现阶段取得了十分显著的研究成果,但是由于未考虑特征分布不均匀问题,对点特征划分产生影响,导致车道半径提取精度较低以及公交交通效率降低。为此,设计并提出一种基于Edline线特征的既有道路中公交专用车道划分方法。
2 既有道路现状分析
随着我国经济以及科学技术的迅猛发展,直至2010年,我国机动车驾驶者大约有2.05 亿人。受到各种政策的影响,我国机动车数量一直呈直线上升趋势,但由于城市道路网存在诸多问题,导致公交车与其他机动车混合行驶,频繁的变道致使交通事故频发,严重阻碍交通发展,导致道路中车速下降以及车况较差等情况的频发,另外,也影响了人们的正常出行以及国家的经济发展。
现阶段为了提升道路的通行能力,在既有车道宽度的基础上规划公交专用车道是十分有必要的。
3 既有道路中公交专用车道划分方法
3.1 基于Edline线特征的车道动态半径提取
基于Edline线特征的车道动态半径提取主要是通过Edline 线特征进行提取以及描述。Edline 线特征提取描述划分为:
(1) 线段的检测;
(2) 线段提取[6-7]。
通过LBD描述子对全部提取的线段进行描述以及匹配,具体的流程如图1所示。

图1 提取流程
在图像的低纹理结构化场景中,具有十分丰富的线性特征,但是这些特征的存在会导致稳定性以及连通性较差等问题的产生。为了更好地解决上述问题,通过线段长度设定参数阈值,这样能够有效加强线特征的连通性以及完整性,提升整个方法的综合性能[8-9]。
在低纹理场景中,线特征具有优异的表现,当各个线特征之间缺少关联信息时,会产生大量的异常线段。为了得到更加满意的特征提取结果,主要通过边缘检测算法中的边缘检测算子进行边缘绘制[10],组建连续的像素链;再通过最小二乘拟合方法,在像素链中提取线段;最后结合设定的长度阈值参数,有效消除错误线段。以下给出具体的操作流程,如图2所示。

图2 车道动态半径提取流程图
传统的线段提取方法,主要提取独立、不相交且不连续的线段。Edline线特征提取方法的计算步骤为:
(1) 对既有道路图像进行平滑处理;
(2) 经过平滑处理之后分别计算图像的梯度取值以及具体方向。
利用公式(1)给出既有道路图像任意像素点的总梯度计算公式:

上式中,Gx代表水平方向的梯度值;Gy代表垂直方向的梯度值。
分别对比不同像素在不同方向的梯度大小,并设定锚点,其中阈值的设定能够准确反映锚点的数量以及边缘绘制过程,以下详细给出锚点组建像素链的过程。
选取一个起始点(x,y),当水平边缘通过(x,y)时,对比(x,y+1)、(x,y)、(x,y-1)三点处的像素梯度值,最大点设定为(x,y),假设水平边缘通过点(x,y),则对比(x-1,y+1)、(x-1,y)、(x-1,y-1)处的像素梯度值,选取最大值,和(x,y)相连,直到点(xi,yi)不是边缘像素。
针对组建的完整像素链,采用最小二乘线拟合的方法进行线段的拟合提取,通过偏差绝对值之和最小的原则进行拟合:

上式中,xi、yi代表像素点的坐标。针对拟合的线段,计算线段长度以及线段端点的位置[11-14],根据计算两条相邻线段端点的欧式距离,设定阈值参数,以此组建完整联通的线段,通过线段在任意方向以及距离上的差异,设定线段中间点的距离阈值,以此实现车道动态半径提取,即:

3.2 车道划分结果
区域生长主要是通过事先设定的准则将像素或者子区域分成更大区域的过程。一般情况下,相似性准则的选择不仅依赖于颜色问题,还取决于有效图像数据的类型。假设图像是单色的,则采用一组基于灰度级和空间性质的描述子对区域进行分析[15]。以下采用比例选取方法,即整幅图像的高和宽需要按照一定比例设定感兴趣区域的高和宽,具体的计算式如下所示:

上式中,h代表车道线图像的高;w代表车道线图像的宽;r1、r2代表感兴趣区域的高和宽所占据的比例系数。通过以下公式求解图像两侧感兴趣区域:

上式中,f 代表图像矩阵;w代表图像的宽;lr、rr代表图像感兴趣区域的高和宽。
由于路面属于较暗的区域,所以路面的灰度值也偏小,需要采用的中值计算方法如下所示:

上式中,m代表感兴趣区域的灰度均值;S1、S2代表左右感兴趣区域内种子集合。
通过以下公式获取候选车道线区域的图像矩阵,即:

利用图3给出既有道路中公交专用车道划分流程图。

图3 既有道路中公交专用车道划分流程图
划分既有道路中公交专用车道需要对图像进行扫描处理,但是依次扫描各个点是十分缓慢的。以下采用相对位置扫描算法进行分析研究。设定图像左下角为二维坐标系原点,其中扫描流程如下所示:
(1) 设定直线x=[n/2]为扫描结束位置。
(2) 将图像进行初始化处理,同时进行图像两侧扫描。
(3) 循环扫描图像的每行,分别从两侧的开始点集合保存的位置扫描到直线x=[n/2]。
(4) 假设在左侧图像中扫描到既有道路中公交专用车道线特征点,则寻找出和该点连通的全部车道线点。
(5) 在右侧图像中扫描到车道线特征点。
(6) 跳转到步骤(3),然后继续扫描下一行,直到完成全部的扫描为止。
为了方便计算,需要设定车道线抽象数据结构[16-17],即:

在完成车道扫描之后,需要对既有道路中公交专用车道线进行筛选。主要思想为:计算车道线左右边缘对应点的斜率,通过斜率相似进行判断,具体的计算式如下所示:

既有道路中公交专用车道线的宽度变化率计算式为:

通过以下公式判断L是否为既有道路中公交专用车道线,具体的判断公式为:

其中导航向量为:

通过3.1小节提取的车道动态半径进行进一步处理,获取符合特征的车道线,具体的处理结果如下所示:
3.1小节提取的车道动态半径均为独立的车道线,由于车道线在直道以及弯道的形状完全不同,针对不同情况的车道线进行建模。
各个道路模型所对应的多项式为:

对车道线建模之后,需要判断两条车道线是否属于相同一条虚线型车道线,具体的判定依据如下所示:

由于较远处的既有道路中公交专用车道在图像中很难划分出来,需要通过已经划分的车道线信息对较远处的车道线进行预测。
设定预测车道线为L={S,E,R},先选取车道线L的最后m个样本信息,具体的计算式为:

通过以下公式预测车道线的后续点:

在上述分析的基础上,通过道路区域的连通性以及区域方法获取路面区域,以达到既有道路中公交专用车道划分的目的:

4 实验验证
为了验证所提基于Edline线特征的既有道路中公交专用车道划分方法,需要进行仿真实验测试,实验选取SLAM 领域中具有权威的数据集进行实验,具体的实验环境为:Inter(R)Core(TM)2DuoCPU T6600@2.2GHz,内存4GB,操作系统为Windows 7,编程语言为Python,实验软件为PyCharm5.0.3。整个实验主要划分为两个不同的阶段,第一阶段主要对比车道半径提取精度;第二阶段主要对比公交交通效率。所提方法的公交车道规划仿真效果图如图4所示。

图4 规划效果
具体的实验结果如下:
(1) 车道半径提取精度:
分析表1~表3中的实验数据可知,在三种方法中,所提方法的车道半径提取精度明显更高,尤其是在样本数量增加的情况下,车道半径提取精度不会受到较大的影响。主要是因此所提方法在具体操作的过程中,有效解决了特征分布不均匀问题,提升车道半径提取精度。
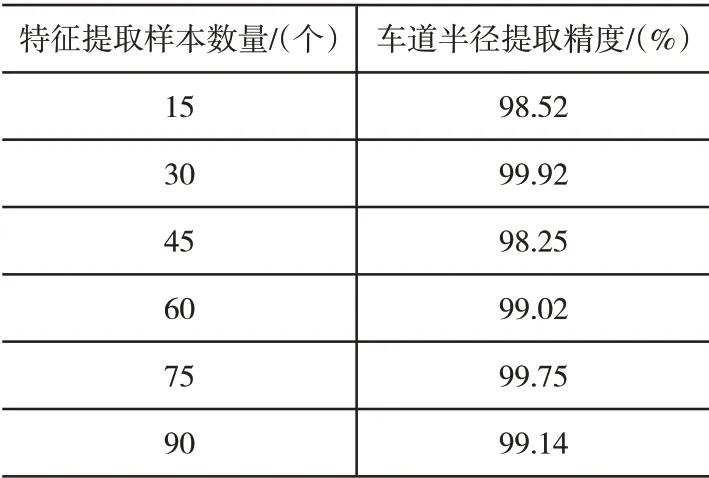
表1 所提方法的车道半径提取精度

表2 文献[4]方法的车道半径提取精度

表3 文献[5]方法的车道半径提取精度
(2) 公交交通效率/(%):
利用图5给出不同方法的公交交通效率对比结果:
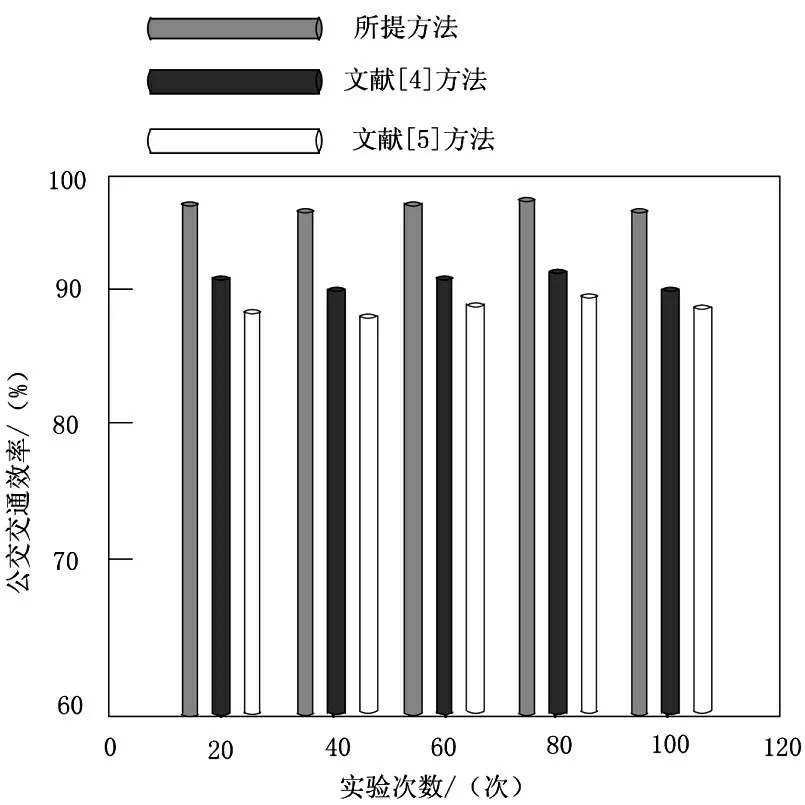
图5 不同方法的公交交通效率对比结果
由图5中的实验数据可知,所提方法的公交交通效率明显最高;文献[4]方法的公交交通效率次之;文献[5]方法的公交交通效率最低。其中最为主要的原因在于:所提方法有效解决了特征分布不均匀问题,同时增加了车道半径提取精度,既有道路中公交专用车道划分的准确性也得到大幅度增加,使公交交通效率也得到有效提升。
5 结束语
针对传统方法存在的一系列问题,设计并提出一种基于Edline 线特征的既有道路中公交专用车道划分方法。仿真实验结果表明,所提方法能够有效提升车道半径提取精度,增强公交交通效率。由于受到时间以及研究范围的限制,导致所提方法仍然存在一定的弊端,后续将进一步对所提方法进行有效改善。
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
小学生学习指导(高年级)(2021年5期)2021-05-18 07:34:42
中国交通信息化(2020年11期)2021-01-14 03:30:34
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:42
小学生学习指导(低年级)(2019年4期)2019-04-22 03:28:40
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38
专用汽车(2018年10期)2018-11-02 05:32:26
专用车与零部件(2016年6期)2016-03-13 08:02:02
中国交通信息化(2015年10期)2015-06-06 06:39:31