汽车主动悬架与电动助力转向结构研究
2022-04-11 07:46:51黄立君高志刚
科技风 2022年10期
关键词:汽车
黄立君 高志刚
摘 要:汽车底盘系统中主动悬架和电动助力转向系统作为重要环节,它们相互影响、相互作用。基于此,文章以汽车相关结构概述为切入点,通过建立汽车系统动力学模型,设计汽车控制器,实现主动悬架和电动助力转向系统的协调控制,提高汽车运行舒适性和稳定性。
关键词:汽车;主动悬架;电动助力转向;转向结构
汽车行业的迅速发展,使得人们对汽车性能提出了更高要求,特别是操纵稳定性与行驶平稳性最受人们关注。而汽车悬架系统、转向系统作为关键部件,对车辆行驶具有直接影响,也是厂商提高车辆性能的重点,主要是车辆行驶中,受限于不平整路面,可能会引发振动,通过悬架、车轮、座椅及车身传递至人员身上,需通过悬架系统、转向系统减少驾驶员疲劳感。汽车作为复杂整体,行驶中转向和悬架系统具有相互耦合影响,需加强集成控制,保证车辆行驶性能。
1 汽车相关结构概述
1.1 主动悬架
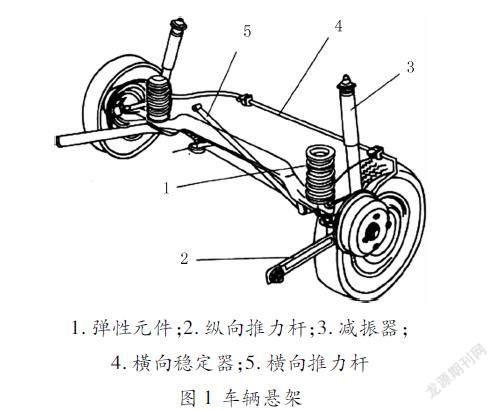
汽车系统较为复杂,行驶中由于转向,受到路面不平和车速影响,导致发动机、车轮产生振动,降低车辆经济性,还会对车辆平顺性造成影响,导致驾驶员操作车辆出现不适感,损坏车辆承载物及零部件,需以悬架作为保稳减震的部件。车辆底盘中悬架是重要部分,也是车身和车轮传力、连接装置总称,利用悬架能够连接车桥和车身,传递车轮与车身力矩,减缓车辆行驶于不平路面的冲击,确保驾驶员舒适和货物完好(见图1)。
根据图片可知,弹性元件能够缓和不平路面引发冲击,保证车轮与车身弹性联系;减震器能够加快衰减车身与车架振动,保证车辆稳定行驶;导向机构由横向、纵向推力杆组成,能够传递车轮、车身力矩,保证车轮根据轨迹保持车架、车身稳定。汽车行驶状态不同,悬架性能要求不同,正常行驶要求悬架柔软,转弯制动要求悬架坚硬。本文研究主动悬架,使得悬架系统阻尼特性和刚度可结合汽车行驶情况实现自适应调节,保证系统处于减震最佳状态,具有控制车身高度,兼顾操作稳定性与平顺性的优点。
1.2 电动助力转向
汽车转向系统是车辆底板重要环节之一,能够改变或恢复车辆行驶方向,结合不同转向动力源,将系统分为机械式、动力式类型。本文以电动助力转向系统为研究对象,人们对汽车转向灵敏、轻便性能要求较高,机械转向无法满足需求,传统腋芽系统尽管能够解决轻便转向系统,却易导致驾驶员高速行驶下丧失路感,也会增加油耗。采取电动助力转向,能够利用ECU调节,满足行驶工况对系统需求,应用前景广泛。
2 建立汽车系统动力学模型
车辆底板作为振动的复杂模型,建立动力学模型,是探究车辆行驶稳定、平顺的基础前提,底盘系统较为复杂,需搭建相应模型,便于仿真研究。
2.1 路面模型
车辆振动是道路不平造成影响,不平度道路具有随机性,路面平整作为复杂、随机过程,难以统计分析。为简化研究,按照国际标准ISO文件划分路面不平度等级,功率谱密度公式如下:
Gq(n)=nn0-wGq(n0)(1)
其中,n0是参考空间频率,为0.1m-1;n是空间频率;Gq(n0)是路面不平度系数;w是频率指数,取2。路面功率谱密度是垂直方向位移功率谱密度,引入速度公路普密度,能够补充统计路面不平度特性,一定范围中幅值是常数,仅和Gq(n0)相关,可采取白噪声通过成型滤波进行描述,公式如下:
q1(t)=2πn0 Gq(n0)W(t)v-2πfn00q1(t)(2)
其中,n00是路面空間截止频率;q1(t)是前轮路面激励;v是车速;W(t)是白噪声;f是时间频率。
2.2 主动悬架模型
模型建立中考虑整车转向、侧倾、俯仰运动的气度自由动力学模型。公式如下:
Mv(φ+β·)-haM·aθ¨-sij=0(3)
其中,M是整车质量;θ是俯仰角;Ma是簧载质量;β是质心侧偏角;φ是横摆角速度;sij是轮胎侧偏力。前轮由于转角小,轮胎线性模型取:
Fbij=(zbij-zcij)kbij(4)
其中,kbij是垂直刚度;zbij是非簧载质量;Fbij是垂直荷载;zcij是路面输入。
2.3 电动助力转向模型
车辆转向系统中,电动助力转向系统是基于机械转向结构,添加电动机提供助力扭矩,辅以电控单元与扭矩传感器,使得EPS工作中,ECU能够接受车速、转矩新药控制电动机,以此为转向提供助力。
电动机模型:
Bmθm·+Jmθm¨=Tm-(θm-Gθe)km(5)
转向柱模型:
Bsθs·+Jsθs¨+Ts=Th(6)
输出轴模型:
Beθe·+Jeθe¨=Ts+(θm-Gθe)Gkm-Tw(7)
其中,Jm是电动机转动惯量;Js是转向柱转动惯量;Je是减速机构转动惯量;Ts是转矩传感器获得数值;Bs是转向柱阻尼系数;Be是减速机构阻尼系数;Bm是电动机阻尼系数;θm是电动机旋转角;θs是转向柱旋转角;θe是输出轴旋转角;Th是转向盘转矩;Tm是电动机电磁转矩;Tw是输出轴转矩;Ts转矩传感器测得数值;G是减速比。
3 汽车控制器设计
3.1 半主动悬架控制
(1)模糊控制算法。模糊控制数利用丰富经验总结的自然语言进行控制,能够通过实际操作归纳数据,获得控制规律,借助计算机实现自动控制,无需了解控制对象模型,容易被人员接受,控制器设计不依赖精准模型,适应性良好。模糊语言值由多个模糊集和组成,描述输出量和输入量,以控制系统精准度决定集合树木,集合正负对称,遵循模糊控制规则,将操作者控制经验获得的模糊条件集合为控制语句,以此完成模糊控制。
(2)模型不确定参数。整车模型中轮胎有4个,能够引入不确定参数,以乘性不确定代表参数不确定性,公式如下:
ms=(emδm+1)ms—(8)
其中,-是公称参数,|δm|<1,kn、ms代表轮胎刚度,分析实际模型变动情况,取em数值0.3,应用LFT将系统中δm不确定参数输入输出进行计算。
(3)悬架性能指标。汽车询价系统对于汽车操作稳定、平顺具有直接影响,设计悬架系统需考虑性能指标,具体指动挠度、平顺性、等效控制力、轮胎动载荷。
(4)搭建模糊控制模型。建立SFunction接口,搭建悬架模糊控制器与路面模型户运行仿真,添加LMS AMESim前缀代表顺利连接接口,根据AMESSim采集的车身垂向速度、垂向加速度信号,利用模糊控制,以此输出悬架阻力控制力,反馈阻尼控制力至软件减震系统,提高车辆稳定性。
为保证结果准确,选用两种路面輸入激励仿真,B级路面和C级路面,选择速度50km/h,利用软件仿真车辆模型。以此可知,B级路面输入模型垂直加速度降低,改善了动行程比,轮胎动荷载无显著变化;C级路面下垂直加速度、动行程比也有所改善,保证了车辆行驶稳定性。
3.2 电动助力转向控制
(1)PID控制算法。PID控制是采取比例、积分、微分控制规律方式,吸取PD和PI控制优点,提高系统稳定性,减少超调量,应用PID控制器中,比例控制能够稳定系统,以微分控制调节偏差,以积分控制消除余差,合理调节控制参数后,能够将PID控制优点充分发挥出来。PID控制应用广泛,灵活使用,仅需设置参数值,即可实现多样化控制,具有原理简单、控制便捷、适应性强、鲁棒性好的优点,根据系统控制对象调节参数,不会随被控对象特性产生较大变化,适用于工业工程。
(2)控制系统。车辆转向中,为增强车辆转向稳定性,需合理控制电动助力转向系统。车辆行驶时出现转向,输入转向盘转角信号向转矩信号转变,ECU接收转矩信号和车辆速度信号,处理分析即可获得电流信号,减去助力电机运转的电流信号,可通过信号转换进行控制转矩输出,经过执行机构达到控制效果。根据实际转向系统情况,利用PID控制助力转向,在AMESim软件构建模型,创建接口,输入量助力特性曲线图和反馈电流,从模型输入值接口,设置系统参数,进入仿真模式,PID结合软件采集助力特性曲线及反馈电流,借助PID控制电压信号,提高车辆稳定性。
4 汽车主动悬架和电动助力转向结构集成控制
4.1 提出集成控制
悬架和转向系统集成控制中,能够利用转向系统提供助力矩,经过转向机构作用至车轮,地面能够产生横向力,加快车辆横向加速度,使得车辆进行离心运动,存在惯性作用会使得车辆倾斜,影响悬架控制侧倾角与动挠度。悬架系统中,输入路面干扰会造成侧倾、俯仰、簧载质量垂向运动,需重新分配车辆车轮荷载,影响转向控制。而集成控制中,可分为协调、分散及集中控制,其中,集中控制是对整体子系统构件数学模型,设置控制器实现集成控制,子系统互相耦合,可采取现代控制理论设计控制器,却由于控制器与系统模型阶数高,难以有效实施;协调控制能够单独建立子系统模型,设置控制器,以上层协调方式调节系统耦合关系。协调控制便于扩展系统,提高可靠性,设计便捷,本文采取协调控制方式,实现主动悬架和电动助力转向集成控制。
4.2 协调控制过程
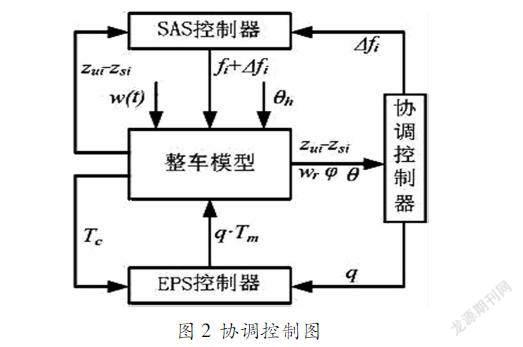
在协调悬架和转向系统中,需设计独立悬架控制器,增强系统鲁棒性与模型精确性,建模中考虑不确定因素,对于转向和悬架系统相互影响、作用不考虑,简化设计控制器任务,降低系统建模难度。在单独涉及转向控制器中,也不考虑相互影响,采取简单线性二自由度模型和转向系统模型设计控制器,完成独立控制器后,考虑系统耦合关系,以此实现集成控制,直接将独立控制器接入整车系统,无需对控制器重新设计,利用上层协调器对系统耦合关系加以协调(见图2)。
汽车转弯中,EPS系统结合方向盘操纵转矩与转角输入调节助力转矩,SAS控制器结合车辆状态进行询价系统调节,不考虑协调控制,系统将根据最佳性能完成单独控制,使得车辆横摆角速、侧倾角及悬架动扰度难以达到优化状态,较大的车身侧倾角,会导致汽车产生危险情况。利用协调控制中,控制器需结合车身俯仰角、横摆角速度、侧倾角度等状态信号,协调EPS与SAS系统,以模糊控制设计协调控制器。在控制中,汽车信号输入控制器,输出额外作用力用于SAS系统,产生作用力控制悬架,车辆左转中,以左前轮为例,协调控制器的辅助作用将会根据悬架动挠度增大逐渐减小。
协调控制器采取单输出、输入一维控制器,根据输入信号设置单独控制器,各有规则库与隶属度函数,使得助力系统和往外作用力均由4个输出量叠加构成,通过调节加权系数,协调控制中控制输入信号大小,通过转变甲醛稀释,增加对横摆加速度与侧倾角度控制。例如,车辆左前轮,以悬架动挠度为输入量,基本变化量是[-0.1,0.1],量化因子选择10,控制偏差E论域,划分语言变量为模糊集,隶属函数应用三角函数。输出量论域Z同样划分语言变量为模糊集,以重心法计算,输出比例系数是150,获得等效辅助数值,重复上述计算过程,进行协调控制。
结语
综上所述,本文建立路面模型、主动悬架模型及电动助力转向模型,立足于模糊控制阀与PID控制措施,设计汽车控制器,采取单输出、输入一维控制器,根据输入信号设置单独控制器,实现协调控制,可有效降低轮胎动位移与悬架动挠度,改善汽车稳定性。
參考文献:
[1]纪文煜.基于模型驱动架构的电动汽车电动助力转向系统可靠性研究[J].太原城市职业技术学院学报,2021(07):205207.
[2]张文杰,刘言强.解析新能源车辆电动助力转向系统控制策略[J].内燃机与配件,2020(22):203205.
[3]李志鹏,那少聃,常子凡.自抗扰控制的车辆电动助力转向系统回正控制[J].哈尔滨工程大学学报,2020,41(07):10661072.
[4]张志勇,蒋文杰,李博浩,王建波.轮毂驱动电动汽车的差动助力转向与回正控制[J].长沙理工大学学报(自然科学版),2019,16(04):8593.
[5]陈潇凯,王晨宇,施国标.车辆主动悬架与电动助力转向系统协同优化[J].吉林大学学报(工学版),2020,50(04):11531159.
[6]刘志尚,段敏.四轮独立驱动电动汽车EPS转向特性研究[J].汽车实用技术,2019(04):3235.
[7]王文庆,李锋,魏红梅.电动自行车重力感应转向灯设计[J].智富时代,2018(11):144.
[8]曹景胜,李刚,段敏,师合迪,刘丛浩.基于驾驶模拟器硬件在环的EPS助力特性研究[J].中国科技论文,2018,13(16):18641870.
[9]于永初.关注未来汽车技术,让汽车转向器更智能[J].汽车工艺师,2018(06):4547.
[10]曾建力,程海涛.液罐车电动助力转向和主动悬架集成控制研究[J].汽车零部件,2016(03):2326.
猜你喜欢
人民交通(2020年22期)2020-11-26 07:36:44
小学生优秀作文(低年级)(2020年4期)2020-07-24 08:31:08
汽车与安全(2019年9期)2019-11-22 09:48:03
汽车与安全(2019年8期)2019-09-26 04:49:10
汽车与安全(2019年5期)2019-07-30 02:49:51
汽车观察(2019年2期)2019-03-15 06:00:06
汽车与新动力(2018年2期)2018-05-09 00:31:56
儿童时代·快乐苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年级(2016年4期)2016-04-18 00:24:37
决策探索(2014年21期)2014-11-25 12:29:50