
残疾人轮椅智能避障功能创新研究
2022-04-11 11:02王榕赵延浩郝智诚陈日莉
电脑知识与技术 2022年5期
关键词:模糊控制
王榕 赵延浩 郝智诚 陈日莉


摘要:为研究电动轮椅的智能避障功能,该研究特点在于将HC-SR04超声波传感器和ZY101红外避障传感器相结合使轮椅对环境的感知更加准确,通过多传感器融合技术和模糊控制技术的研究进一步提高避障功能计算的精确度,使电动轮椅在实际行驶中可以自主地完成路线规划并躲避障碍物,更安全便捷地抵达目的地。
关键词:智能避障;多传感器融合;模糊控制
中图分类号:TP18 文献标识码:A
文章编号:1009-3044(2022)05-0014-03
1 研究背景及意义
调查显示,我国现有残疾人、失能和半失能老人超过1.5亿人,从辅助器具的使用量来看,现有为残疾人有效提供急需的救助设施和服务仍然不足。由此看来,智能避障轮椅拥有广阔的市场发展前景,其发展必不可少。智能轮椅国内外研究现状及发展趋势见[1-2]。
基于电动轮椅和智能避障系统的研究,使轮椅能够在实际操作过程中躲避道路上的障碍物且不断感知周围状况,进而自主规划和调整最优路线,能够安全快捷地到达目的地。此研究利用现代科技帮助弱势群体更好地融入社会、建立良好的人际关系,且最重要的意义是降低轮椅事故的发生率和为残疾人建立安全舒适的生活通道。
2 研究内容
本研究采用“Arduino Uno R3”作为整个系统的核心,同时将常见的“HC-SR04”超声波传感器和“ZY101”红外避障传感器共同作用于障碍物感知和测距,通过模糊控制算法融合这两种传感器的工作结果,从而在轮椅遇到障碍物时,遵循模糊规则进行自动避障,控制轮椅的转向,使轮椅不与障碍物发生碰撞。进一步,在设定循迹模式的运行中遇到障碍物时,轮椅先进行智能避障,再判断是否继续循迹,实现轮椅在到达目的地的过程中能够智能化进行路径规划、躲避障碍物并安全地到达目的地。下面分别从避障循迹系统控制子模块和模糊控制两大方面展开叙述。
2.1 避障循迹系统控制子模块
基于智能轮椅在朝目标地点正常前行或循迹状态中,超声波传感器测出各个方向是否有障碍物及距障碍物的距离,同时红外传感器检测各个方向的障碍物状况,反馈到“Arduino UNO R3”主控中心。当轮椅接收到多个传感器的反馈信息时利用模糊控制算法,进行避障绕行分析、驱动电机模块、控制前后左右轮胎速度,进行合理准确的避障、及时做出应对动作,进行智能避障。最终轮椅将沿着最优路径重新规划路线直至目的地或避障动作完成后又继续进行循迹。如图1为智能避障系统工作流程图。
1)“HC-SR04 ”超声波传感器测距方法:用“Trig”触发测距,先给“Trig”引脚一个持续时间>10μs的高电平,等待“Echo”引脚返回高电平。因为障碍物到发射器/接收器的距离公式:
h=t*c/2,
其中,c=340 m/s为超声波在空气中的传递速度。所以只需再知道这个高电平的持续的时间t ,就能根据公式得到超声波传输的距离h[3-5]。
}
2)ZY101传感器和其他红外传感器一样,灵敏度高,便于对近距离路面情况的检测。它判断前方有无障碍物的工作方法是:发光管发射出去的红外光束遇到障碍物会反射回来,接收管接收到反射光会将信号传达给“Arduino UNO R3”主控模块。从而根据接收信号判断障碍物远近及控制外部驱动模块、调节安全的前进方向。在前方检测到有障碍物的情况下,则输出低电平,蜂鸣器响,“LED”灯亮;反之,蜂鸣器不响,“LED”灯不亮。
3)TR5000循迹传感器也是利用物体的反射性质,首先需要在地面贴上要循迹的黑线,因为黑色会吸收光线,而地面是白色的会反射光线,其工作方法:分别在实验小车的底部安装左右两个循迹红外传感器检测黑色跑道。在循迹传感器的发光二极管不断发射红外光线时,接收不到返回的信号说明被黑色跑道吸收,并且会输出高电平;能接收到信号,说明在白色区域,则输出低电平。当左边的循迹传感器检测不到信号,而右循迹的红外传感器检测得到,则表明左循迹传感器在黑色跑道上,轮椅已经向左偏移了轨道,左车轮压到黑线上,车应往左转;反之当右边的检测不到信号,而左边的检测得到,则表明轮椅向左偏离轨道,车右轮压在黑线上,车应往右转。如上判断轮椅是否按照跑道正常运行,如偏离跑道则能判断出如何偏离及如何回归跑道。
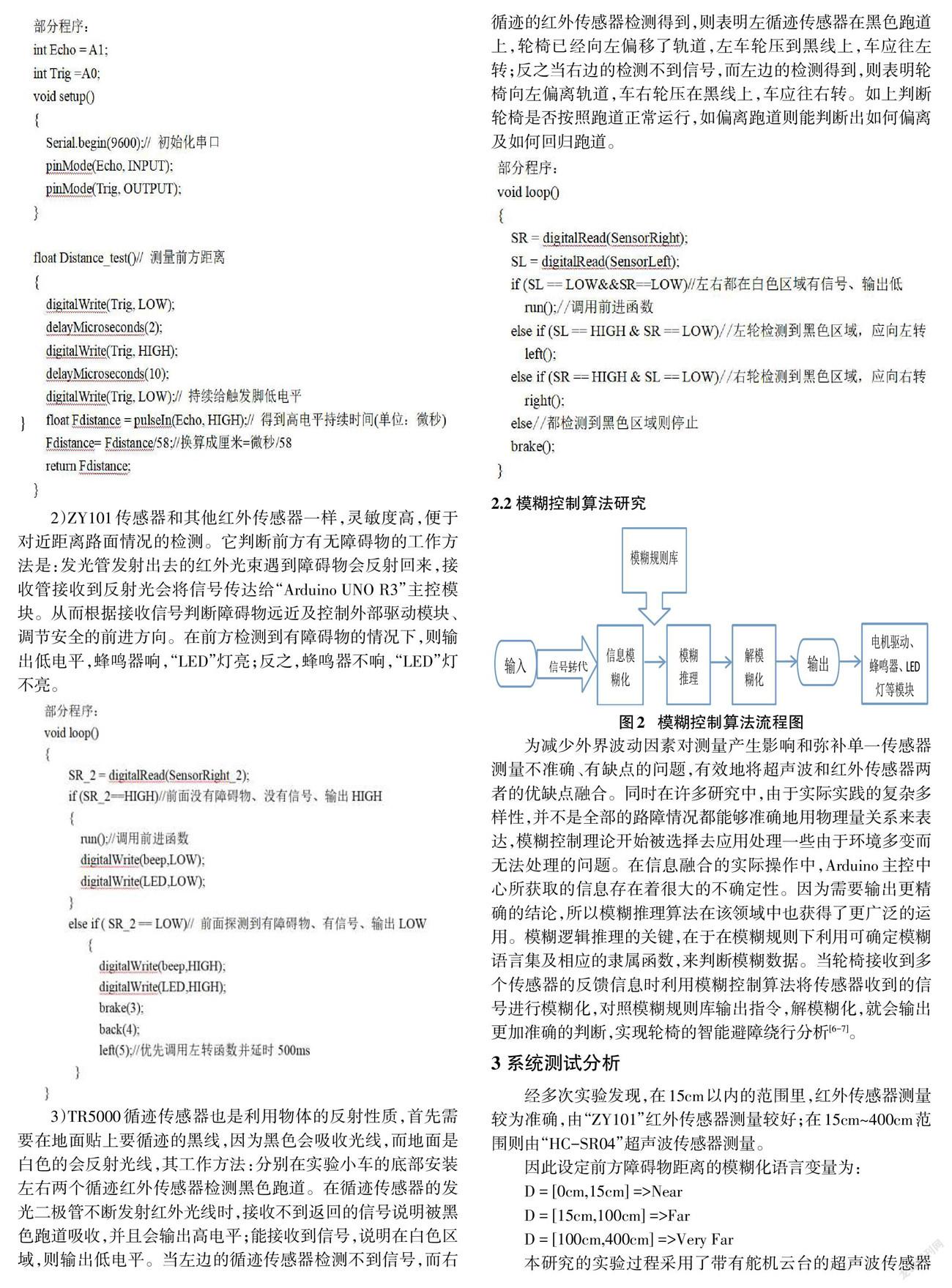
2.2 模糊控制算法研究
为减少外界波动因素对测量产生影响和弥补单一传感器测量不准确、有缺点的问题,有效地将超声波和红外传感器两者的优缺点融合。同时在许多研究中,由于实际实践的复杂多样性,并不是全部的路障情况都能够准确地用物理量关系来表达,模糊控制理论开始被选择去应用处理一些由于环境多变而无法处理的问题。在信息融合的实际操作中,Arduino主控中心所获取的信息存在着很大的不确定性。因为需要输出更精确的结论,所以模糊推理算法在该领域中也获得了更广泛的运用。模糊逻辑推理的关键,在于在模糊规则下利用可确定模糊语言集及相应的隶属函数,来判断模糊数据。当轮椅接收到多个传感器的反馈信息时利用模糊控制算法将传感器收到的信號进行模糊化,对照模糊规则库输出指令,解模糊化,就会输出更加准确的判断,实现轮椅的智能避障绕行分析[6-7]。
3 系统测试分析
经多次实验发现,在15cm以内的范围里,红外传感器测量较为准确,由“ZY101”红外传感器测量较好;在15cm~400cm范围则由“HC-SR04”超声波传感器测量。
因此设定前方障碍物距离的模糊化语言变量为:
D = [0cm,15cm] =>Near
D = [15cm,100cm] =>Far
D = [100cm,400cm] =>Very Far
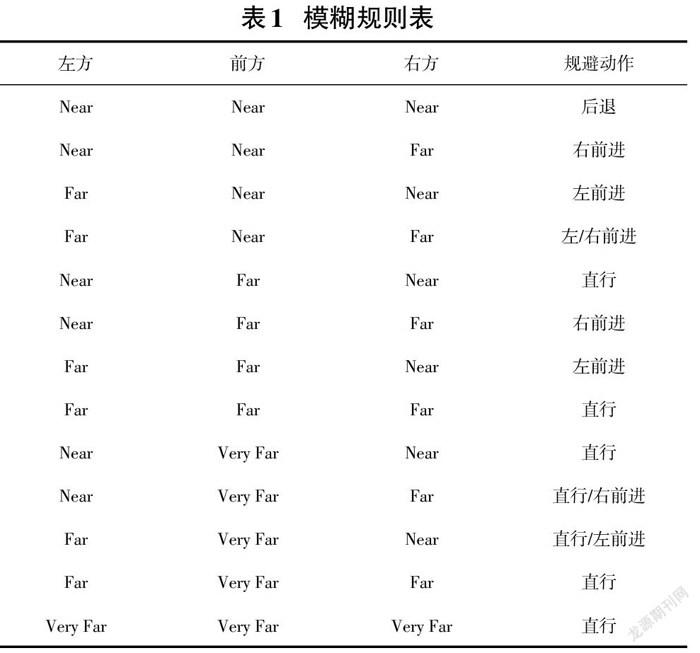
本研究的实验过程采用了带有舵机云台的超声波传感器如图3智能避障实验小车,可以180度旋转测距,并安装在轮椅正前方位置;在轮椅底盘左右兩侧分别安装红外避障传感器。同时,根据超声波传感器测量角度范围设定舵机摇头角度右转为正、左转为负、垂直于轮椅的正前方为0度。各方向分别为左方[-135°,-45°],前方[-45°,+45°],右方[45°,135°]。
则有根据前方障碍物方向和距离来判断轮椅规避动作的模糊规则表[7-10]:
在对控制中心制定好模糊控制规则、设定好安全距离后,主控中心将依据多个传感器接收的信息,进行模糊决策及非模糊化处理,同时结合设定的安全距离选择最优路径。主控中心将下达最终命令,驱动电机模块,控制前后左右轮胎速度,及时做出应对动作躲避障碍物或沿着最优路径前进,以此实现轮椅的智能避障功能。
4 总结及展望
通过对轮椅智能避障功能的研究,初步设计了包含三种控制模式的智能避障轮椅方案,分别是循迹模式、自动避障模式、红外遥控模式。本研究根据多传感器融合技术、模糊逻辑控制理论等,实现了残疾人轮椅智能避障功能的创新研究。由于“ZY101”红外传感器检测范围不远、易受自然光的影响和“HC-SR04”超声波测距模块会因为测量距离近的情况下产生回波干扰的问题,所以有效地将两者结合起来,从而提高测量精度和对环境感知的准确率。在实际的应用场景中,需要根据系统特性和检测到的环境特性物理量进行信息融合。虽然初见成效,但对于适合残疾人的智能避障轮椅的研究仍是冰山一角,许多问题有待进一步研究,例如动态避障相比静态避障难度更大以及与实际地图结合后产生的问题等。随着新技术的发展,残疾人轮椅智能避障功能会越来越完善,期望未来有更多多元化元素的加入,帮助更多残疾人使用上更安全、自由的智能避障轮椅。
参考文献:
[1] 周晶.室内智能轮椅自动避障系统研究[D].南京:南京师范大学,2014.
[2] 鲁涛,原魁,朱海兵.智能轮椅研究现状及发展趋势[J].机器人技术与应用,2008(2):1-5.
[3] 罗琴.基于Arduino的避障小车设计与实现[J].黑龙江科学,2017,8(20):24-25.
[4] 张奎.智能轮椅控制系统研究[D].淮南:安徽理工大学,2018.
[5] 李凯,奚梦娇,陈德勇,等.基于互联网技术的多功能盲人“导航杆”的设计[J].辽宁科技学院学报,2021,23(1):11-13.
[6] 包蓉,祁镘潼,杨司杰,等.基于多传感器融合的智能电动轮椅模糊测距控制[J].电子制作,2021(12):68-69,84.
[7] 吕继亮.基于多传感器信息融合的无人小车避障算法研究[D].广州:华南理工大学,2020.
[8] 王战雷,王喜太,苏宏伦,等.模糊控制技术在智能轮椅避障中的应用[J].微计算机信息,2007,23(25):35-37.
[9] 张宇婷.基于模糊理论的小车避障应用研究[D].西安:西京学院,2017.
[10] 贾松敏,高立文,樊劲辉,等.模糊神经网络在智能轮椅避障中的应用[J].华中科技大学学报(自然科学版),2013,41(5):77-81.
【通联编辑:谢媛媛】
收稿日期:2021-11-08
基金项目:2021年度山东省国家级大学生创新创业训练计划项目:残疾人轮椅智能避障功能创新研究(项目编号:202113006045);2020年度大学生专项科研项目:残疾人轮椅智能避障功能的设计与研究(项目编号:20YCKYXS14)
作者简介:王榕(2000—),女,山东烟台人,本科在读;赵延浩(2000—),男,山东淄博人,本科在读;郝智诚(1999—),男,山西吕梁人,本科在读;陈日莉(1975—),女,山西大同人,通信作者,副教授,硕士,研究方向为物联网应用、嵌入式系统。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22
