基于三维激光扫描与贴近摄影测量的地质灾害监测研究
2022-04-09 07:45蒋霖
南方自然资源 2022年3期
蒋 霖
1.广西建设职业技术学院,广西 南宁 530007
2.广西空间信息与测绘重点实验室,广西 桂林 541004
当前,传统的地质灾害巡排查与监测手段已难以满足防灾减灾的需求,寻求一种兼顾地质灾害监测体整体变形状态和重要局部细节变形的监测方法是地质灾害监测工作的现实需求。
三维激光扫描技术和无人机摄影测量是近几年发展起来的三维测量新技术,能够快速、直接地获取地质灾害监测体的三维点云。在地质灾害监测中,三维激光扫描技术存在无法扫描地质灾害监测体高处凹部盲区的不足,无人机摄影测量存在无法获取植被密集处的地表变形数据的问题,将两者结合取长补短,通过统一的空间坐标系统实现数据融合,能有效监测和分析地质灾害监测体整体变形状态和重要局部细节变形,满足地质灾害监测工作的需要[1-2]。
1 地质灾害监测方法
基于三维激光扫描与贴近摄影测量的地质灾害监测方法是将三维激光扫描技术和无人机贴近摄影测量获取的点云数据,通过迭代最近点(Iterative Closest Points,简写为ICP)算法将数据融合在一起生成高质量的三维点云模型,再对地质灾害监测体整体变形状态和重要局部细节变形进行分析[3-4],技术流程如图1所示。
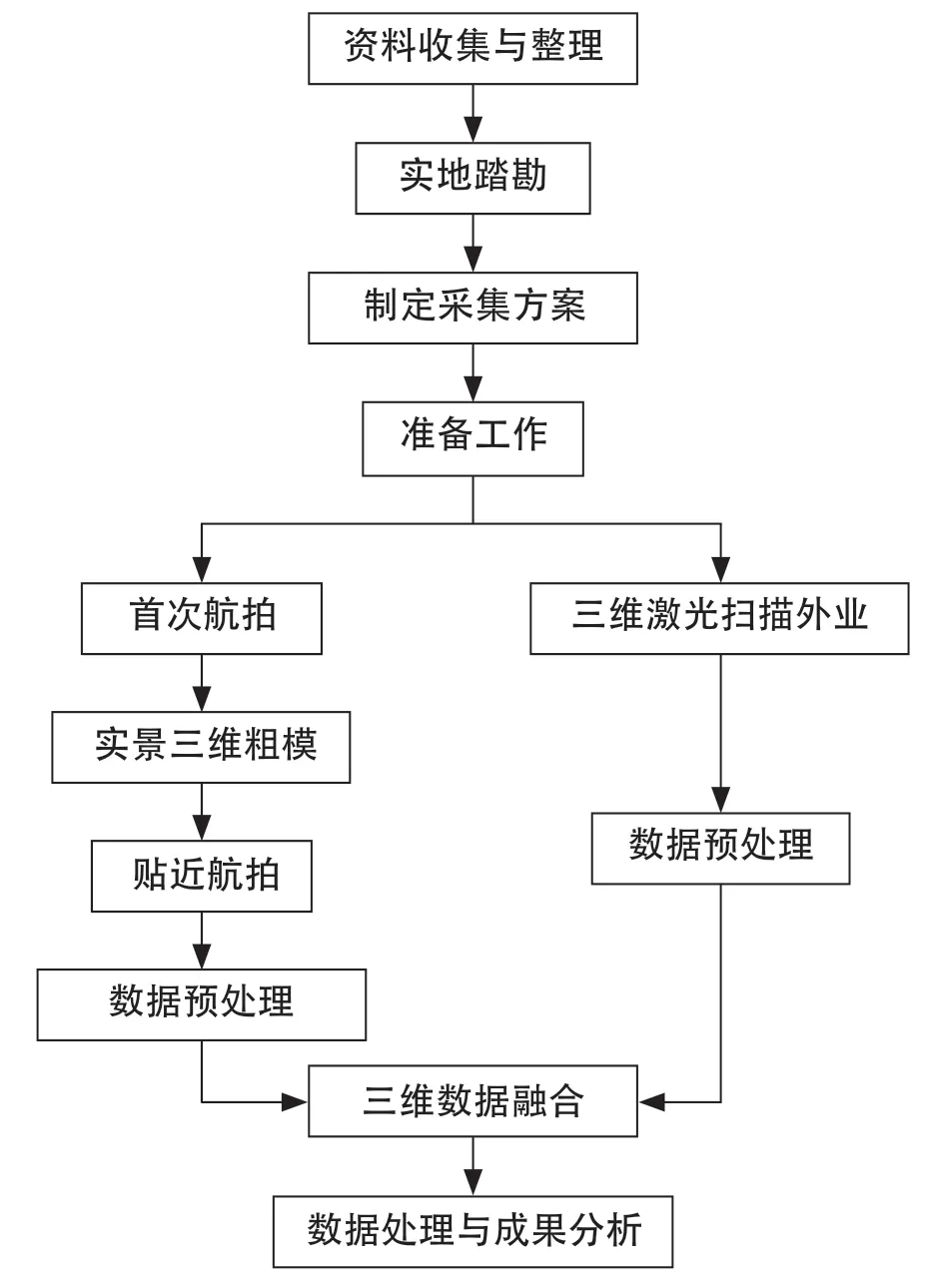
图1 基于三维激光扫描与贴近摄影测量的地质灾害监测方法技术流程图
贴近摄影测量源于滑坡、危岩崩塌的地质调查、监测与预警,是精细化对地观测需求与无人机发展结合的产物,其基本流程是采集目标表面的超高清分辨率影像,通过数据处理,获取研究对象的精确坐标和精细结构形态,目前已在滑坡监测、城市精细重建、古建筑重建、水利工程监测等方面进行探索和应用[5-6]。
三维激光扫描技术具有非接触、精度高、效率高、穿透性和适应性强等优点,能应用于地质灾害中不同变形阶段的地表变形监测。但地质灾害监测环境一般较为复杂,地形高低起伏、高边坡陡坎、台阶裂缝、沟谷、变形危险区等形成了不少数据采集盲区。贴近摄影测量通过灵活的空对地观测,能够有效地采集到这些盲区的数据。两者结合能实现无死角地采集地质灾害监测体地表的完整三维点云数据。
2 工程实例
2.1 工程概况
某滑坡是发育在自然斜坡和人工边坡上的浅层土质大型滑坡,滑坡体长317 m,宽182 m,平均厚度约8.6 m,总体积约 50 万m3;滑坡体物质主要由上、下两部分组成,上部以粉质粘土为主,下部以含碎石土粉质粘土为主,整体结构松散,稳定性差,危险程度较大。
2.2 监测前期工作
2.2.1 资料收集与方案制定
笔者通过收集监测滑坡体的地形数据、地质调查资料,结合实地踏勘结果,制订了监测方案。
(1)进行三维激光扫描数据野外采集,获取滑坡体的三维激光扫描点云数据。
(2)进行无人机倾斜摄影测量,获取滑坡体初始地形信息建立粗模。
(3)根据三维激光扫描点云数据的凹部盲区,结合监测需要,利用无人机倾斜摄影测量粗模进行精细航线规划,实施贴近摄影测量。
(4)将三维激光扫描数据与无人机摄影测量数据融合进行变形分析。
2.2.2 仪器设备及软件准备
投入的仪器设备及软件主要有Faro FocusS 350 三维激光扫描仪1 台、大疆精灵Phantom 4 RTK 无人机摄影测量系统1 套、中海达V98 RTK 接收机4 台、徕卡LS15 数字水准仪1 套、高性能计算机6 台等设备以及Smart3D 真三维实景建模系统、SCENE、3DReshaper、大疆智图和航迹大师(WayPoint Master)、Autocad 2019 等软件。
2.2.3 基准点和监测点布设
根据三维激光扫描与无人机摄影测量数据采集与数据融合需要,笔者在滑坡体周边的稳定区域布设了8 个基准点,并且按照D 级精度采用GNSS 测量获得其在2000 国家大地坐标系中的坐标;按照二等水准测量精度联测国家高程点获得其在1985年国家高程基准中的高程。为获取准确的局部信息,笔者在能够反映滑坡体变化特征的重要位置布设了10 个监测点,并且埋设了便于识别的标靶。
2.3 野外数据采集要点
2.3.1 三维激光扫描数据野外采集
为了保证监测成果的精度和可靠性,笔者每次采集数据时都使用相同的三维激光扫描仪,按照方案设计的扫描参数,在相同的站点架设三维激光扫描仪,在相同的基准点架设标靶进行数据拼接和坐标转换。
2.3.2 无人机倾斜摄影测量粗模获取
笔者通过现场踏勘发现监测区域的高差较大,存在因地形高低起伏、边坡陡坎、台阶裂缝、沟谷、变形危险区等环境条件形成的三维激光扫描数据采集盲区,需要采用贴近摄影测量实施数据补充采集。根据监测区域的地物、地形情况,笔者将无人机倾斜摄影测量获取粗模时的航高设置为180 m,航向重叠率设为80%,旁向重叠率设为75%;航飞完成后利用高性能计算机及Smart3D 真三维实景建模系统处理数据,获取滑坡体DSM 地表模型数据、DOM正射影像等初始地形信息,生成实景三维粗模。
2.3.3 贴近摄影测量
笔者根据三维激光扫描点云数据的凹部盲区,结合监测需要,选出了需要重点监测的位置,再利用无人机倾斜摄影测量粗模使用航迹大师(WayPoint Master)软件进行精细航线规划,实施贴近摄影测量。重点拍摄了三维激光扫描点云数据采集盲区的裂缝、沟谷及边坡等。
2.4 监测数据处理
数据处理主要包括三维激光扫描数据处理、无人机倾斜摄影测量数据处理、数据融合3 部分。
2.4.1 三维激光扫描数据处理
依照现场的实际情况,笔者根据8 个基准点利用SCENE、3DReshaper 软件将经拼接、数据去噪后的点云数据归化到2000 国家大地坐标系和1985年国家高程基准中,生成满足数据融合的三维点云模型。
2.4.2 无人机倾斜摄影测量数据处理
笔者将无人机摄影测量获取的照片和贴近摄影测量的照片导入到瞰景Smart3D,经过拼接、空中三角测量解算、自动匹配DSM 等方法生成地质监测体的三维点云模型[7-8]。生成的点云模型的空间基准为CGCS2000 坐标系,符合1985年国家高程基准,满足了数据融合和监测分析的需求。
2.4.3 数据融合与精度分析
笔者用中海达V98 RTK 和徕卡LS15 数字水准仪精确测出8 个基准点、10 个监测点、20个特征点的坐标和高程作为已知量,来检测三维激光扫描、无人机倾斜摄影测量和贴近摄影测量点云的精度。发现三维激光扫描精度最高,贴近摄影测量精度居中,倾斜摄影测量精度最低(见表1)。为了提高数据融合后点云的精度,笔者以三维激光点云为基准,用贴近摄影测量点云数据进行配准融合,不采用倾斜摄影测量点云。
为了减少数据融合中计算机数据处理的负担,笔者先将经过数据处理后获得的三维激光扫描三维点云模型和无人机贴近摄影测量三维点云模型进行分类,剔除植被、其他地物等非地表点云数据,生成地质灾害监测体的地表三维点云模型。
为了提高融合效果,避免出现局部最优,笔者先通过人工处理的方式在两组点云中选择10 对分布合理的同名点进行粗配准,这时2 类点云近似重合;再通过ICP 算法多次迭代进行精细配准,满足精度要求后,将二者的三维点云数据进行融合。其融合算法是在某一点邻域内存在三维激光扫描、贴近摄影测量这2 类点时保留三维激光扫描,当只有1 类点时直接保留。
而后笔者利用中海达V98 RTK 和徕卡LS15 数字水准仪精确测出的8 个基准点、10个监测点、20 个特征点的坐标和高程作为已知量,检测了融合后的数据精度,发现融合后点云精度低于三维激光扫描、高于贴近摄影测量(见表1),能满足一般地质灾害监测的精度要求。从数据融合过程来看,影响数据融合后点云精度的因素主要有以下4 个方面。
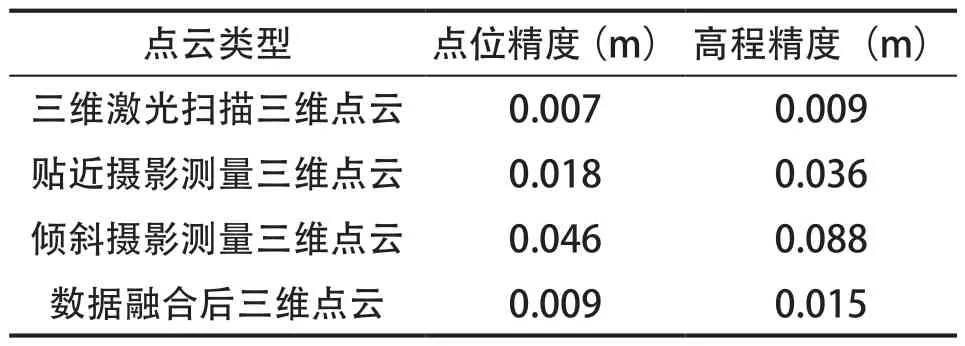
表1 监测区域点云精度表
(1)与数据融合前各点云的精度有关,融合前各点云精度越高则成果精度越高。
(2)与融合算法有关,三维激光扫描精度较高,数据融合时采用的点数越多则成果精度越高。
(3)与选取的用于匹配的同名点有关,其精度越高,同名点数量及空间分布越合理,两者融合后的点云精度就越高。
(4)与选取的用于匹配的同名点相互之间的空间内符合精度有关,同名点相互之间在三维激光扫描成果中的距离与在无人机贴近摄影测量成果中的距离差值越小,其精度越高。
2.5 地质灾害监测成果分析
笔者利用监测区域2021年6 月12 日和2021年12 月26 日这两期观测数据对监测区域的地质灾害监测体整体变形状态和重要局部细节变形进行分析。
2.5.1 整体变形状态分析
笔者通过数据融合生成地质灾害监测体表面完整的三维点云模型,得到1~2 期成果(见图2),通过对比分析发现滑坡体前部蠕动、垮塌,不断牵引后部滑坡体下错、前移,总体来说在垂直滑坡方向上,滑坡体轴部附近的位移较两翼大;在滑坡方向上,中部位移最大,底部较上部大,上部存在垮塌的隐患。
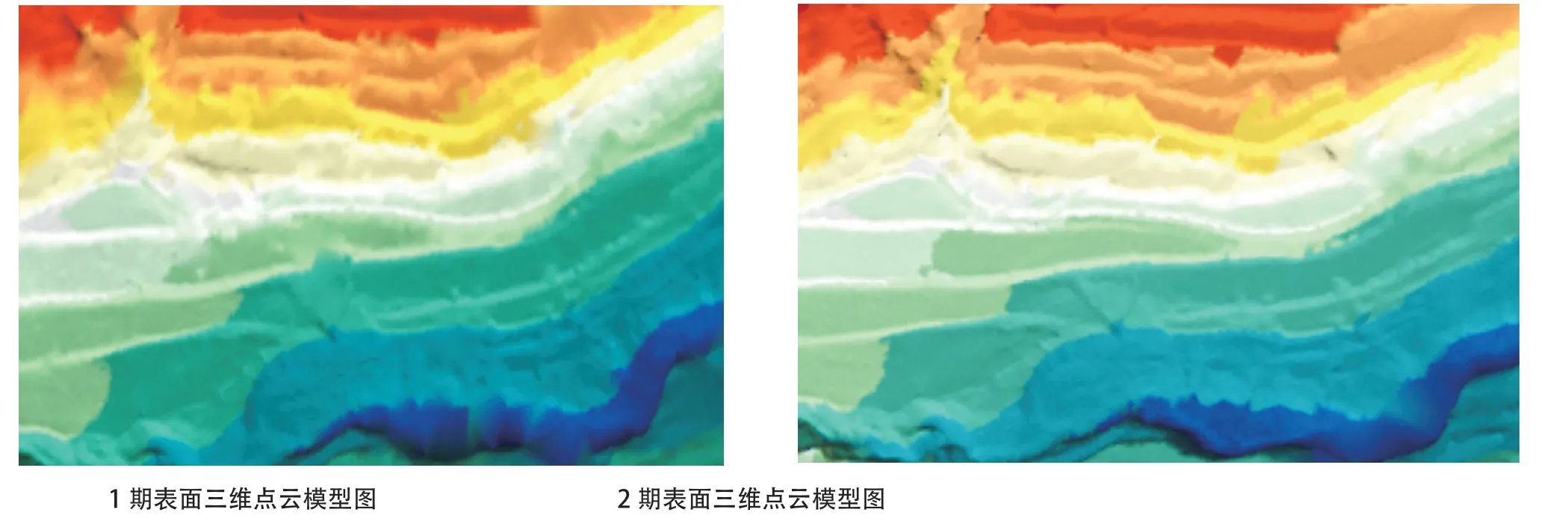
图2 表面三维点云模型图
2.5.2 重要局部细节变形分析
地质灾害监测体重要局部细节变形分析主要包括滑坡特征监测点、主要陡坎变形和台阶裂缝3 个方面。
(1)监测点成果分析。笔者从监测区域2021年6 月12 日和2021年12 月26 日两期观测数据提取获得了10 个特征监测点的监测成果(见表2)。
从表2 可知,两期间滑坡体有较明显的位移。其水平位移最大值为0.381 3 m,最小值为0.084 0 m,平均水平位移为0.221 9 m;垂直位移最大量为-0.280 9 m,最小值为-0.040 7 m,平均垂直位移为-0.148 7 m。从监测点分布来看,滑坡体轴部位移最大,向两翼逐渐减少。
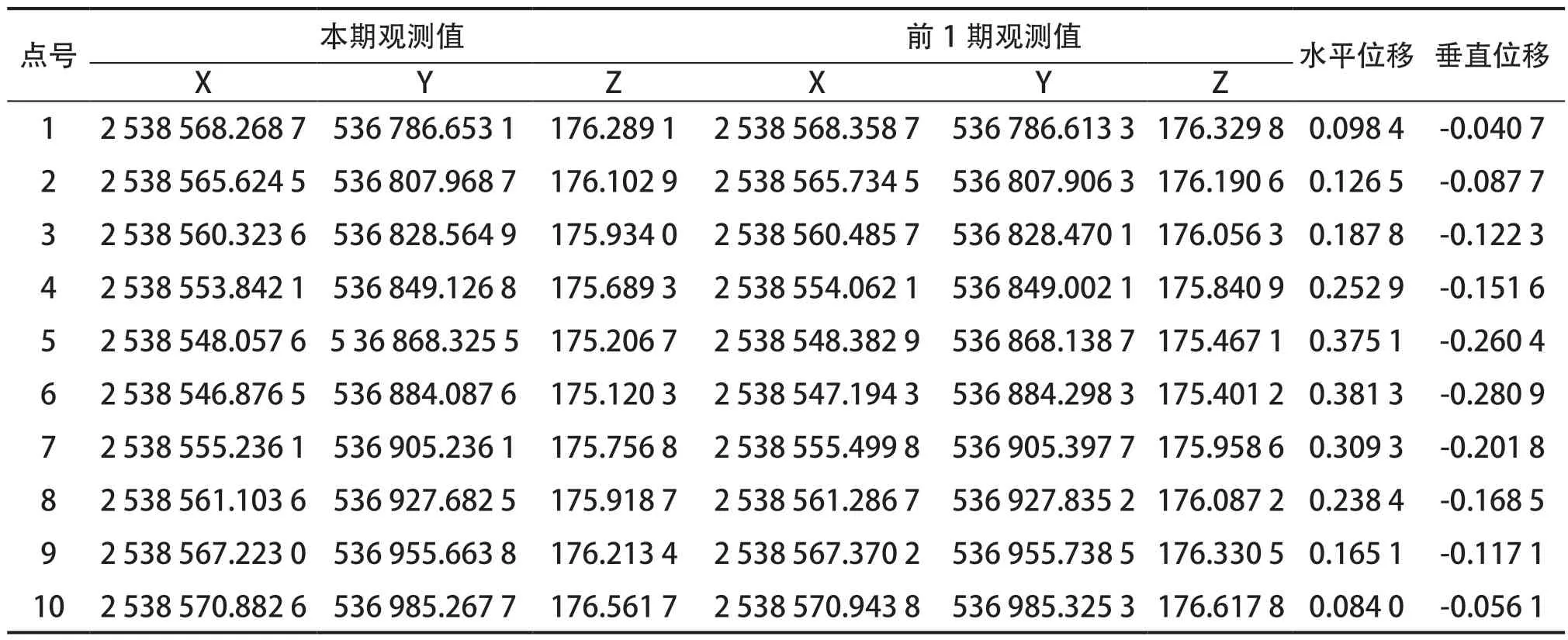
表2 监测点成果表 单位:m
(2)陡坎分析。陡坎是滑坡监测体的重要局部,且在点云数据中特征明显,便于提出分析。笔者从监测区域2021年6 月12 日和2021年12 月26 日两期数据融合后的完整表面三维点云模型提取陡坎数据,然后进行叠加分析发现陡坎的变形明显,平均水平位移为0.253 6 m,平均垂直位移为-0.162 3 m。其中变形最大的是滑坡体中部的陡坎。
(3)裂缝分析。笔者利用地质灾害体表面完整的三维点云模型生成的等高线图分析其长度、宽度等尺寸信息和变化情况发现该滑坡监测体存在小型台阶裂缝。根据地质灾害监测体表面完整的三维点云模型,笔者利用3DReshaper 软件生成裂缝的等高线,将二维的DXF 文件导出到Autocad 2019 中分析尺寸信息和变化情况,其中一个裂缝的两期等高线成果如图3 所示。
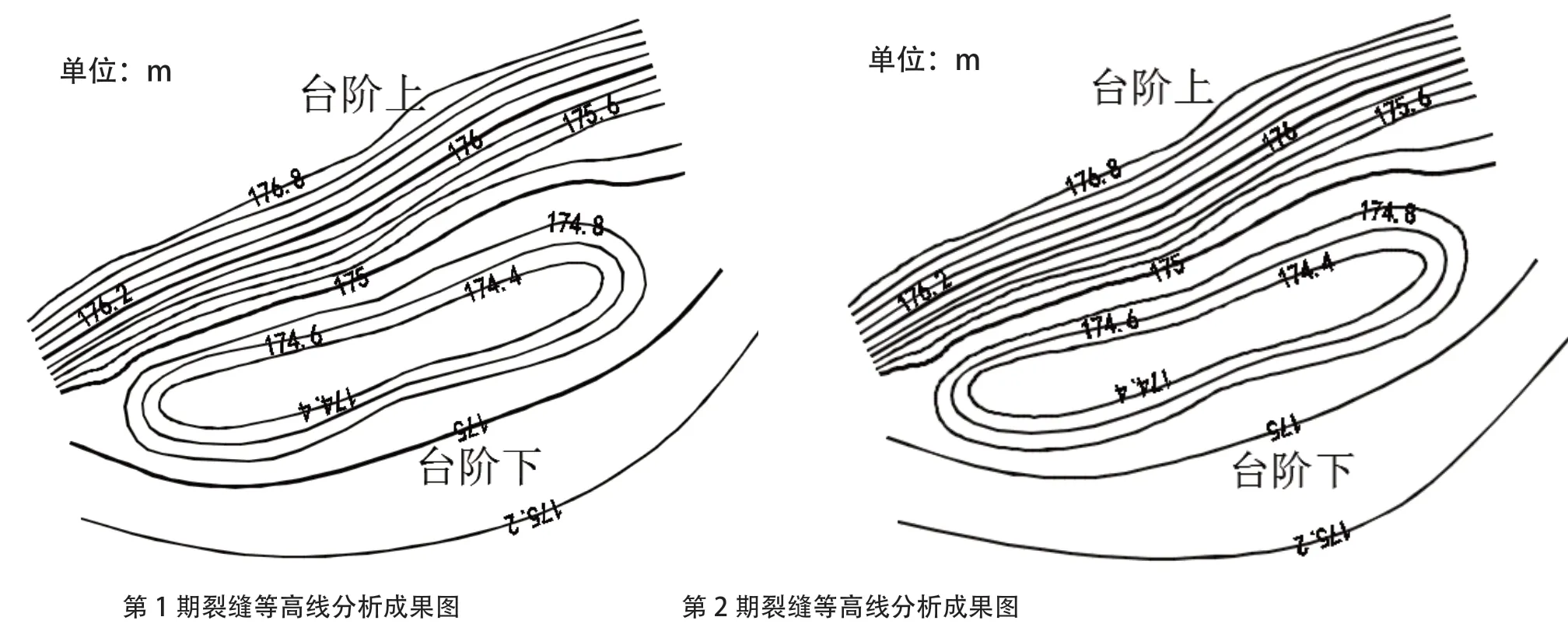
图3 监测区域裂缝等高线分析成果图
通过分析笔者发现等高线密集部分为台阶上部,等高线稀疏的为台阶下部,裂缝最深处高程近似为174.4 m,台阶最高处高程约为176.8 m。然后笔者利用 Autocad 2019 量算工具量得该裂缝最低处,即高程为174.4 m 处第1 期裂缝长11.403 m,最大处宽1.475 m,最窄处宽 1.166 m;第2 期裂缝长 11.895 m,最大处宽1.633 m,最窄处宽 1.304 m,则该小型台阶裂缝2 期间长度的变化量为 0.492 m,最大处宽度的变化量为 0.158 m,最窄处宽度的变化量为 0.138 m。
综上所述,基于三维激光扫描与贴近摄影测量的地质灾害监测方法获取的监测数据能够反映滑坡监测体的整体变形状态,也能提取地质灾害监测体重要局部细节变形数据。
3 结 语
基于三维激光扫描与贴近摄影测量的地质灾害监测方法能够利用三维激光扫描和无人机贴近摄影测量的优点获取地质灾害监测体全面的三维点云数据,通过数据融合生成地质灾害监测体地表的完整三维点云模型,能准确、及时地分析地质灾害监测体整体变形状态和重要局部细节变形,为做好灾害预防和治理决策提供信息支撑,对地质灾害监测具有一定的应用价值。但该方法在数据融合时为了获取全局最优需要人工粗配准,存在自动化程度不高、数据处理效率有待提高、对计算机硬件要求高等问题,需要对其进行进一步研究以提高其应用效果。
猜你喜欢
一重技术(2021年5期)2022-01-18
昆明医科大学学报(2021年6期)2021-07-31
水利水电科技进展(2020年6期)2020-12-10
科学(2020年5期)2020-11-26
水电与新能源(2020年10期)2020-11-05
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
科技视界(2014年33期)2014-01-02