
基于全卷积网络模型的高分遥感影像内陆网箱养殖区提取
2022-04-08 05:34李连伟张源榆岳增友薛存金付宇轩徐洋峰
山东科学 2022年2期
李连伟,张源榆,岳增友,薛存金,付宇轩,徐洋峰
(1.中国石油大学(华东)海洋与空间信息学院,山东 青岛 266580;2.微山县自然资源和规划局,山东 济宁 277600;3.中国科学院 a.空天信息创新研究院;b.数字地球重点实验室,北京 100094)
目前全球渔业捕捞的产量已趋于稳定,但全球人口却在不断增长,随之增长的水产品需求只能依靠水产养殖来满足[1]。水产养殖的方式主要为坑塘养殖、浮筏养殖和网箱养殖,坑塘养殖位于人工开挖或者天然的池塘中,而浮筏养殖和网箱养殖依赖于浮在水面上的养殖设备。因空间资源限制和生产成本控制等原因,水产养殖正逐步向集约化的网箱养殖发展[2]。据统计,我国的淡水网箱养殖已占据全球主导地位,面积超过70万公顷,占全球报告总量的68.4%[2]。然而集中的水产养殖对周边环境造成严重的破坏,不仅会对当地环境造成污染,还会导致淡水生态系统服务功能的丧失[3],且有研究显示工业化水产养殖甚至会排放更多的温室气体[1]。近年来,国家对生态环境保护和可持续发展愈加重视,故对水产养殖区特别是网箱养殖区的监督和管理也亟需加强。
卫星遥感是最高效的对地观测方法之一,具有成本低、时间序列长、覆盖范围广等优点。近年来,高分辨率遥感技术得到了快速的发展[4],能够为养殖区的长期观测提供质量更高、数量更多的遥感数据。不少学者针对遥感影像的养殖区提取方法进行了深入的研究,如Wang等[5]提出了一种基于多尺度特征融合和空间规则归纳的浮筏养殖区提取方法;Wang等[6]根据养殖区叶绿素浓度高的特点,结合面向对象方法和注意力机制实现了沿海高分影像的浮筏养殖区提取;Kang等[7]基于面向对象方法对2000—2018年辽宁省的海水养殖区进行分析;Zeng等[8]利用支持向量机根据轮廓规则度、周长和面积对内陆湖泊的水产养殖坑塘进行提取;Luo等[3]利用K近邻聚类方法对阳澄湖的围栏养殖区进行识别,并研究了养殖区与水体质量的变化关系。除了以上提到的基于光学影像的提取方法之外,Ottinger等[9]结合数字高程模型(digital elevation model,DEM)数据,利用合成孔径雷达(synthetic aperture radar,SAR)影像对河流三角洲的坑塘养殖区进行提取。上述方法不仅需要人为对参数进行反复调整,且提取的精度取决于参数的设置,导致稳定性较低。
随着深度学习在图像识别领域的快速发展,很多学者将深度学习应用于遥感的各个领域中[10],特别是深度卷积神经网络(deep convolutional neural networks,DCNNs)已经在遥感影像的分类[11-12]、目标检测[13]和语义分割[14-15]等方面得到了广泛的应用。其中语义分割模型对输入图像的每个像元进行分类,包括全卷积网络(fully convolutional networks,FCN)[16]、U-net[17]和DeepLab[18]等。FCN模型是最常用的语义分割模型之一[16],已有不少学者将FCN模型应用于沿海水产养殖区的提取,如Shi等[19]基于FCN模型设计了双尺度同质卷积神经网络(dual-scale homogeneous convolutional neural network,DS-HCN)以识别海陆边界和提取浮筏养殖区。因DS-HCN网络易将相邻养殖区间的水域误判为养殖区[20],为解决该问题,Cui等[20]基于U-Net提出了浮筏养殖区提取算法UPS-Net;Sui等[21]基于DeepLab V3提出了一种沿海离岸养殖区提取算法OAE-V3,并将其应用于山东省东部沿海。因内陆水体叶绿素和悬浮物等物质的浓度常比沿海水体更高,故内陆养殖区的水体光谱和背景水体的光谱差距更小[6,21],导致内陆水体养殖区的提取难度更大。而上述方法均是针对沿海离岸养殖区设计,未必适用于内陆网箱养殖区的提取,目前基于深度学习的内陆养殖区提取研究较少。针对内陆坑塘养殖区的提取问题,Zeng等[22]考虑到坑塘的路堤在行向和列向上较为规则,结合行列自注意(row column self-attention,RCSA)机制和FCN提出了RCSANet模型。但由于浮在水上的网箱养殖区分布零散,各网箱养殖区间相隔一定的距离,在行向和列向上没有固定的模式,故RCSANet无法应用于内陆水域的网箱养殖区。
传统的内陆网箱养殖区提取方法需要人为对参数进行反复调整,准确性和稳定性较低。深度学习已被广泛应用于近海养殖区的提取并且达到较高的精度,但是因为内陆水体和近海水体之间存在较大差异,所以针对近海养殖区设计的深度学习提取模型未必适用于内陆网箱养殖区。因此,本文针对内陆网箱养殖区探讨了基于深度学习FCN模型的养殖区提取,收集了福建省北部的GF-1和GF-2遥感影像并建立了2个内陆网箱养殖区样本库,利用样本库训练了2个FCN模型并进行模型精度验证。
1 研究区域与数据
1.1 研究区域
网箱养殖是利用漂浮在水面上的网箱进行水产养殖,单个网箱为竹竿、木板或钢管结构,面积较小,养殖者常将几个或十几个网箱连接成串线阵、面阵排列,部分成面状点阵排列。据统计,福建省的普通网箱(不包括深水网箱)养殖区面积超过4.336×107m2,占全国总计的84%[23]。福建省淡水养殖产量最大的地方是古田县,该县2014年淡水渔业总产量达1.92×104t,其中闽江古田段水口库区就占了46.3%[24]。闽江古田段位于福建省古田县西南部,研究区域范围为118°25′43″E—118°46′37″E、26°19′2″N—26°28′9″N,全长60.32 km,如图1所示。该地区的网箱养殖主要以草鱼、鲢鱼和白刀鱼等为主,网箱养殖已成为当地居民重要的经济来源。

图1 闽江(古田段)的遥感影像
内陆网箱养殖的几何特征表现为形状规则,单个网箱为矩形,多个网箱连接为长条状矩形;光谱特征表现为单个网箱边缘呈灰白色。
1.2 数据
我国自主研发的高分系列卫星是中国高分辨率对地观测重大专项计划的重要成果之一。GF-1是首颗发射升空的高分系列卫星,其特点是高空间分辨率、多光谱与高时间分辨率的结合[25];GF-2是我国第一颗亚米级空间分辨率的民用光学遥感卫星,其装载的全色相机空间分辨率达到1 m[26]。GF-1和GF-2现已被广泛应用于土地利用情况监测、地质灾害调查和城乡规划等领域[27]。
本文获取了闽江古田段的GF-1影像和GF-2影像,图1为影像的覆盖范围,绿线为闽江古田段的具体位置,GF-1影像和GF-2影像的技术指标如表1所示。

表1 遥感影像的技术指标
2 原理与方法
本文基于FCN模型开展内陆网箱养殖区提取的方法思路如图2所示。收集覆盖研究区域GF-1和GF-2遥感影像;进行包含影像融合、波段选择和影像裁剪的遥感影像预处理;经数据预处理后,通过样本标注、真值制作和样本增强构建样本库;设置初始参数,进行FCN模型训练,并对FCN模型进行测试验证;最后进行精度验证分析。
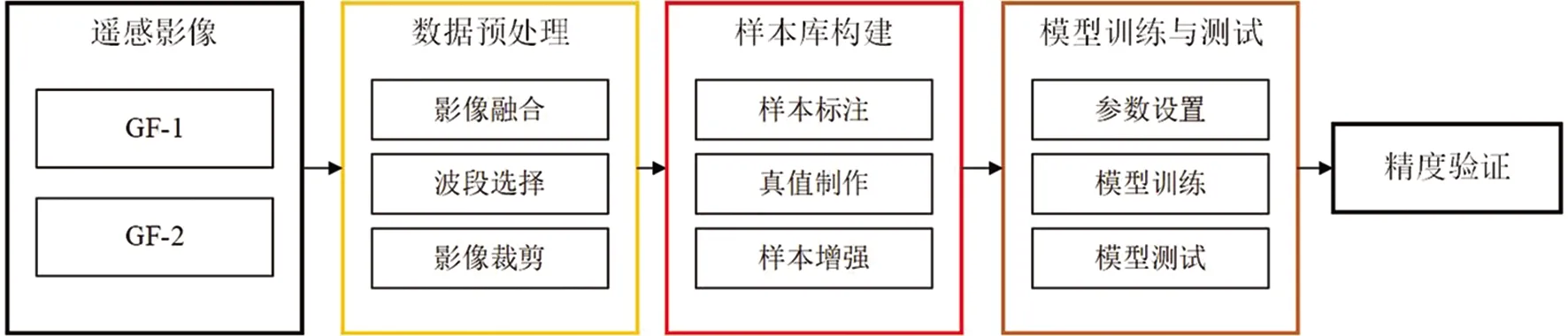
图2 基于FCN模型内陆网箱养殖提取流程图
2.1 影像预处理
为将遥感影像数据运用于FCN模型中,需要对数据进行预处理,具体步骤包括影像融合、波段选择和影像裁剪。
2.1.1 影像融合
GF-1和GF-2卫星都搭载了全色和多光谱相机。全色波段具有空间分辨率高、光谱分辨率低的特点,而多光谱波段具有空间分辨率较低、光谱分辨率较高的特征。因此,本文首先将全色波段和多光谱波段融合成与全色波段空间分辨率一致的多波段影像,GF-1和GF-2遥感影像融合后空间分辨率分别为2 m和1 m。
2.1.2 波段选择
因FCN模型的输入数据为常规的RGB(Red/Green/Blue,红/绿/蓝)三通道图像,并基于内陆网箱养殖区的特点,需要在融合影像中选择合适的三个波段组合成三通道图像。经对比分析,红、绿和近红外波段合成的假彩色遥感影像更能突出内陆网箱养殖区的边缘以及陆地和水体之间的差异(图3),故本文采用假彩色遥感影像的波段组合。

图3 真彩色和假彩色影像的对比
2.1.3 影像裁剪
为了成为政府提供社会福利服务的主要专业力量以及消除弗兰克斯纳(Abraham Flexner)对其非专业评价的影响,社会工作沿着里士满的个人主义价值路径,更加强调运用精神病学和心理治理方法关注个人治疗和改变,越来越多地从事个案服务活动,开始走向过度专业化而不认同志愿服务[7]。由此出现了注重个人治疗的医学实践模式与社会工作专业价值理念之间的冲突,以及社会工作者与志愿者之间平等关系的断裂。随着全球化下社会福利服务多元模式的发展,社会工作开始反思仅关注个人治疗的医学模式的局限,重新强调个人与社会关系,通过重建与志愿服务间的平等合作关系优化整合资源,为服务对象提供本土化的专业服务。
由于计算机图形处理器(graphics processing unit,GPU)显存的限制,完整的一景高分影像无法直接输入FCN模型进行训练,故在建立样本库之前,依据网箱养殖区的大小以及设备的性能将原遥感影像裁剪成400×400的遥感影像。
2.2 样本库构建
影像的空间分辨率是影响内陆网箱养殖区提取的关键因素。相对于实地拍摄的普通照片,卫星遥感影像的像元大小相对于内陆网箱养殖区面积而言比较有限,本文分别建立了GF-1影像的样本库和GF-2影像的样本库。
2.2.1 样本制作
首先通过Labelme软件对遥感影像中的内陆网箱养殖区进行人工标注,在人工标注时要确保误差不超过3个像素。然后将人工标注得到的矢量图像转换为二值栅格图像,其中灰度值1代表内陆网箱养殖区,0代表非内陆网箱养殖区,并将二值栅格图像与原遥感影像组成一组样本(图4)。经过人工标注之后,初步得到216组样本,其中GF-1影像和GF-2影像样本各108组。
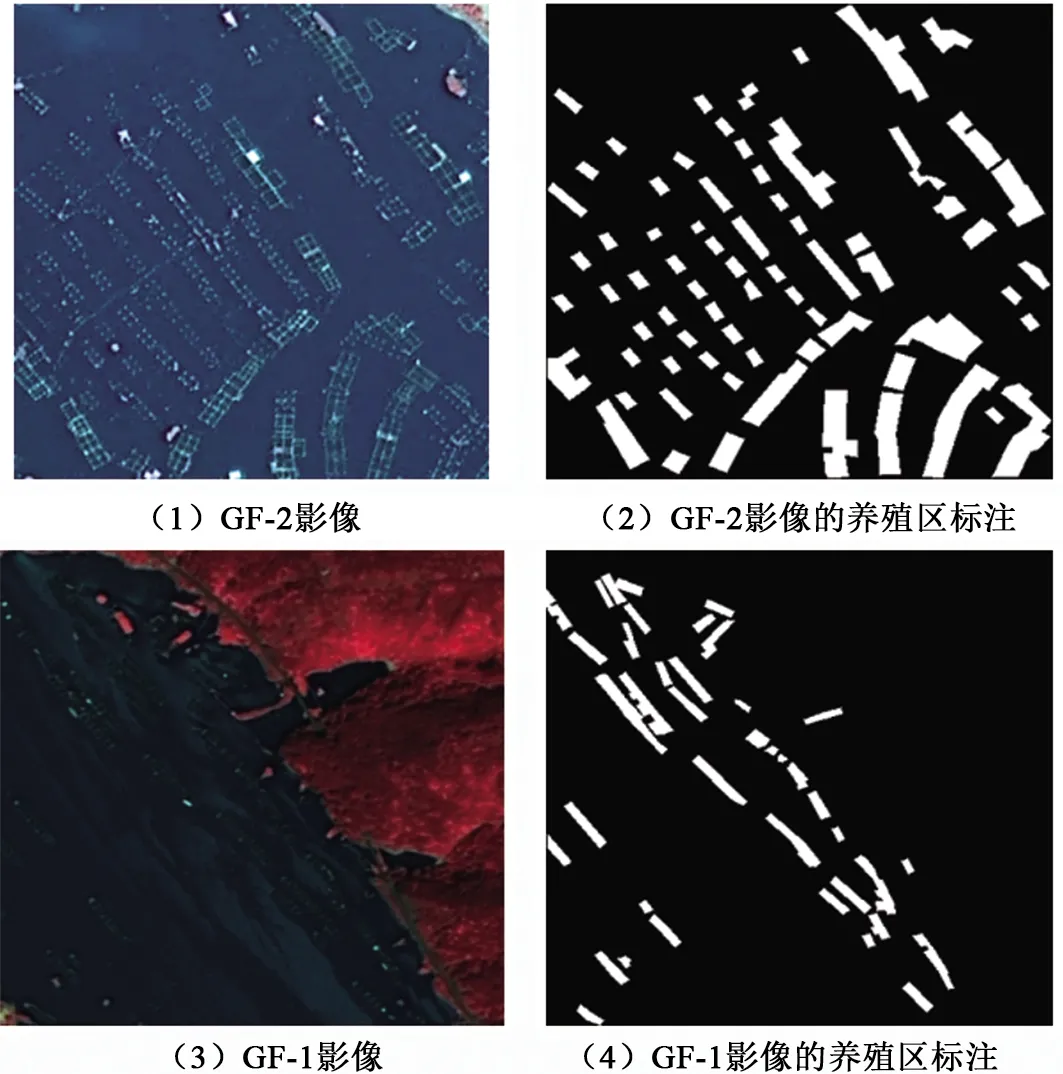
图4 GF-2和GF-1影像样例及相应的养殖区标注
2.2.2 样本数据增强
为提高FCN模型的泛化能力,需要对初步得到的样本作增强处理以增加样本数量。样本增强能充分利用原有的样本,常用的样本增强方法包括旋转、缩放和镜像。本文对原样本进行连续的水平镜像、缩小50%和放大150%,以及90°、180°和270°旋转,最后共得到216×2×3×4=5 184组样本,其中GF-1影像和GF-2影像样本各2 592组。
2.3 FCN模型
FCN模型是一个端到端的神经网络,该模型奠定了语义分割网络模型的基本结构[16]。在原始的卷积神经网络(convolutional neural networks,CNN)中,最底部的网络层是紧跟于多个卷积层之后的全连接层,其输出的特征向量是分类的依据。而FCN模型将CNN模型的全连接层替换为反卷积层(图5),反卷积层的作用是对特征图向上采样,还原至与输入图像相同大小的尺寸,通过分类器实现对每个像素的分类。

图5 FCN结构图
2.4 模型训练
因内陆网箱养殖区的提取属于二分类问题,故将二分类的交叉熵作为损失函数:
(1)
(2)
本文利用TensorFlow框架构建了内陆网箱养殖区提取的FCN网络模型,采用VGG19模型的前5层作初始化,设置的学习率为10-6,批样本数量为8,最大迭代次数为10万次。训练的软件和硬件环境如表2所示。
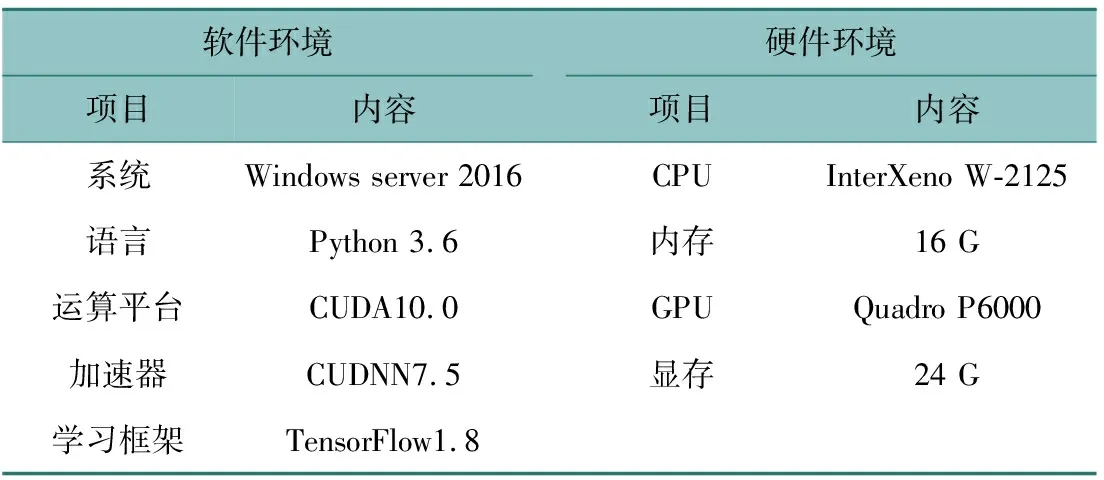
表2 软件和硬件环境
2.5 模型测试与精度评价
采用以下5个常用指标作为FCN模型提取内陆网箱养殖区结果的精度评价指标:精确率(precision)、召回率(recall)、F值(F-measure)、准确率(accuracy)和Kappa系数,分别用变量P、R、F、A和K表示。精确率代表提取为养殖区的水域中提取正确的概率,而召回率代表实际的养殖区中被提取到的概率。精确率和召回率分别从不同的角度衡量提取结果的有效性和准确性,但是两者相互制约,往往不能同时达到最优。F值是精确率和召回率的调和平均,能够综合反映整体的精度。此外,准确率是提取结果中各像元正确的概率,而Kappa系数衡量提取结果与真值的一致性。
P=NTP/(NTP+NFP),
(3)
R=NTP/(NTP+NFN),
(4)
F=(2×P×R)/(P+R),
(5)
A=(NTP+NTN)/Nt,
(6)
(7)
K=(A-Pe)/(1-Pe),
(8)
式中:N表示所有像素个数,NTP表示正确提取的养殖区像素数,NFP表示错误提取的养殖区像素数,NFN表示未提取的养殖区像素数,NTN表示未提取的非养殖区像素数,具体如表3所示。

表3 混淆矩阵
3 结果与讨论
首先利用GF-1样本库和GF-2样本库分别对2个FCN模型进行训练,然后对训练后的FCN模型进行验证,验证结果如图6所示,图6中区域A和B的原始影像为GF-1,区域C和D的原始影像为GF-2。
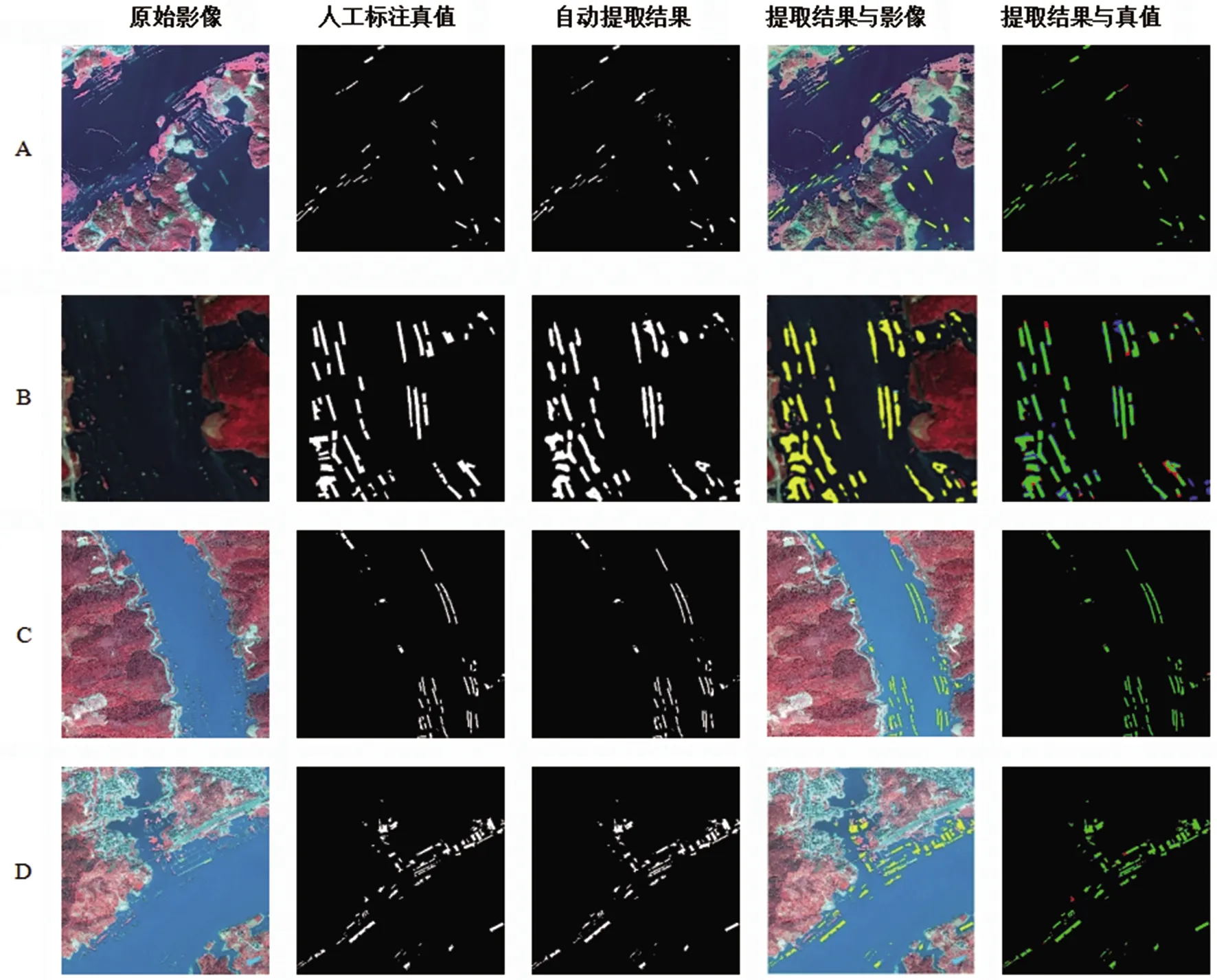
图6 内陆网箱养殖区提取结果
图6中对提取结果和人工标注的真值进行了叠加分析,其中绿色表示正确提取为内陆网箱养殖区,红色为漏提的区域,蓝色为错提的区域。由图6可知,2个FCN模型提取的结果基本与人工标注结果一致,只是在养殖区边缘或者末端存在较小的出入,且能够排除水草、船只和板房等其他地物。图7为区域D提取结果与遥感影像叠加的细节图,由图7可知,即使是细节图左下角的锯齿状养殖区,所构建的FCN模型也能够准确地对其进行识别和提取。

图7 区域D提取结果细节图
由图6和图7可知,因GF-2影像分辨率较GF-1更高,故基于GF-2提取的养殖区棱角分明,更接近规则的矩形,更符合内陆网箱养殖区的实际情况,除了部分宽度较窄的区域被漏提之外,其他区域均能完整地提取出来。基于GF-1影像提取的养殖区边缘比较粗糙,且提取结果的错提区域更多,错提像元容易出现在养殖区分布较为密集而且形状较为复杂的水域,如图6 B区的左下角中,数个相邻养殖区之间的水域被错误地识别为养殖区,导致养殖区密集分布的水域被误判为一整片养殖区。此外,GF-1影像提取结果存在蓝色的斑点,即独立的小面积错提区域,说明空间分辨率相对较低的GF-1影像易受到其他地物的干扰。
本文统计了各区域的混淆矩阵和各项精度评价指标,如表4所示。由表4可知:

表4 精度评价
(1)GF-1提取结果的精确率、召回率和F值均达到80%以上,GF-2提取结果的精确率、召回率和F值也超过90%,其中区域C的召回率为96.09%,说明GF-1和GF-2提取的结果均达到较高的精度。
(2)GF-1提取结果的精确率都高于召回率,说明错提的像元少于漏提的像元;而GF-2的提取结果则完全相反,漏提的像元少于错提的像元
(3)GF-2和GF-1提取结果的Kappa系数都达到了0.8以上,说明2种影像提取结果与人工标注真值的一致性都比较高。
SUI等[21]曾利用最大似然法对山东省的近海网箱养殖区进行提取,结果精度为69.8%。内陆水域叶绿素和悬浮物等物质的浓度通常高于近海水域,因此内陆养殖区的水体光谱和背景水体的光谱差距更小[6,21],养殖区提取难度更大。但本文基于FCN的内陆网箱养殖区提取精度仍高于69.8%。LIU等[28]也曾结合面向对象的水体指数和边缘检测算法对福建省沿海的浮筏和网箱养殖区进行提取,提取结果的F值为82.80%。而本文内陆网箱养殖区提取结果的F值在福建省闽江段区域A、C和D均达到了85%以上。
总之,GF-2提取结果的各项指标均明显优于GF-1提取结果,印证上文对图6的分析,说明空间分辨率更高的遥感影像可以显著提升内陆网箱养殖区提取的精度。但由于GF-1具有重访周期短、幅宽大的优点,所能提供的遥感影像时间分辨率更高,覆盖范围更广,更有利于内陆养殖区的长期实时监测。
4 结论
为了实现对内陆网箱养殖区的快速自动提取,本文利用GF-1和GF-2卫星遥感影像通过人工标注和数据增强构建了2个内陆网箱养殖区的样本库,并将样本库用于训练内陆网箱养殖区提取的深度学习FCN模型。对训练后的FCN模型进行了测试,结果表明,GF-1和GF-2提取的F值分别为83.37%和92.56%,表明训练的FCN模型能够准确地识别和提取内陆网箱养殖区,且2种影像的提取结果与人工标注的养殖区基本一致,同时也证明GF-2影像的提取效果显著优于GF-1影像的提取效果;GF-2漏提的像元少于错提的像元,而GF-1错提的像元少于漏提的像元;分辨率较低的GF-1影像易受水面其他地物的干扰,且在养殖区密集的水域难以区分多个养殖区,会错提养殖区之间的水域。近年来,我国的高分卫星数量逐步增多,影像分辨率也不断提高,故未来可考虑将FCN模型应用于我国其他高分卫星遥感影像的内陆网箱养殖区提取,为内陆养殖区的监管提供详实可靠的数据支撑。
猜你喜欢
海洋与渔业(2022年2期)2022-05-18
渔业现代化(2022年1期)2022-03-10
海洋通报(2021年2期)2021-07-22
环境监控与预警(2021年3期)2021-06-09
今日中国·西班牙文版(2020年12期)2020-01-03
中学生数理化·高一版(2019年12期)2019-12-31
重庆与世界(2019年10期)2019-11-25
同济大学学报(自然科学版)(2019年7期)2019-08-06
天津诗人(2017年2期)2017-11-29
中国船检(2017年3期)2017-05-18
