高分七号卫星激光测高仪无场几何定标法
2022-04-08 00:33李国元唐新明周晓青陈继溢黄庚华高小明欧阳斯达
测绘学报 2022年3期
李国元,唐新明,周晓青,卢 刚,陈继溢,黄庚华,高小明,刘 诏,欧阳斯达
1.自然资源部国土卫星遥感应用中心,北京 100048;2.自然资源部国土卫星遥感应用重点实验室,北京 100048;3.江苏省测绘工程院,江苏 南京 210013;4.中国科学院空间主动光电技术重点实验室,上海 200083
高分七号卫星是我国首颗民用亚米级光学传输型立体测绘卫星,通过激光与立体影像复合测绘应用的模式实现1∶10 000立体测图,卫星搭载了国内首台业务化应用的激光测高仪,主要用于获取高精度高程控制点[1-3]。
卫星在轨几何定标是测绘精度保障的前提条件,激光测高仪的几何定标可分为场地定标和无场定标两类。在场地定标方面,文献[4]在ICESat(ice,cloud and land elevation satellite)卫星发射前研究了GLAS(geo-science laser altimetry system)的在轨几何定标方法,同时结合待定标的参数设计了具体定标方案;文献[5]采用地面红外探测和角反射器对GLAS激光测高仪的指向角和时间同步误差进行定标分析,取得了较好的精度结果;文献[6]分析了GLAS激光的指向确定方法及系统误差,发现激光指向误差与温度有很大的关联性。在无场定标方面,文献[7—8]采用精细地形数据对GLAS激光测高仪的距离和指向偏差进行了定标,并研究了场地的选择;文献[9]建议卫星在大洋上空时采用机动飞行方式对激光测高仪的指向误差进行定标,但要求卫星机动能力强,目前不适合国产卫星。对于无法进行场地定标的火星激光测高仪,文献[10]采用地形数据对火星轨道激光测高仪MOLA(mars orbiter laser altimeter)的激光脉宽进行了分析;文献[11]采用轨道交叉点对MOLA激光指向角偏差进行检校,提高了其水平定位精度,但该方法对于重频率不高、难以构成轨道交叉点的高分七号激光测高仪基本不可行。
针对国产激光测高仪,文献[12]提出了“两步法”在轨几何定标方法,针对资源三号02星激光测高仪不具备波形采样和记录功能,发散角较大、测距精度也较低[13-15]的特点,先后结合地形匹配和地面红外探测器的方法实现资源三号02星试验性激光测高仪的在轨几何定标[16-17],但该方法需要在野外布设大量的地面探测器[18]。相比资源三号02星,高分七号卫星激光测高仪具有全波形数据,且发散角和足印更小、测量精度要求更高。因此,结合高分七号卫星激光测高仪的特点,研究提出更有针对性、精度更高的在轨几何定标方法非常必要。通过地面布设探测器捕捉卫星发射的激光信号实现精确几何定标是目前比较可靠的方法,但2019年11月3日高分七号卫星成功发射以后,受天气及突发的新冠肺炎疫情综合影响,很长一段时间内卫星在轨几何定标的外场试验一直无法有效开展,在这种情况下,充分利用地面已有的基础测绘成果数据开展激光测高仪无场定标试验,对于加快卫星工程进展,快速形成激光高程控制点获取和辅助测图能力,具有重大意义。此外,未来我国要发展多波束的激光测高仪,如果继续采用外场布设大量地面探测器的几何定标方法,工程难度和经济代价非常大,且因波束间可能发生串扰导致该方法难以实现,因此研究无场化的激光测高仪几何定标具有重要的工程应用价值和经济效益。
本文首先介绍了高分七号卫星激光测高仪的基本情况,然后提出了严密几何定位模型以及结合地形匹配和波形匹配的从粗到精的无场分步定标方法,最后结合高分七号卫星激光测高仪的实际数据开展了具体试验和分析。
1 高分七号卫星激光测高仪介绍
高分七号卫星配备两线阵立体相机和两波束激光测高仪,两线阵相机沿飞行方向分别以-5°和26°视角获得幅宽为20 km,分辨率为0.65 m和0.8 m的立体影像,激光测高仪在垂轨平面内与天底点方向左右各成0.7°夹角分别发射激光脉冲点,获取沿轨向地面间隔约2.4 km的高程控制点,如图1所示。
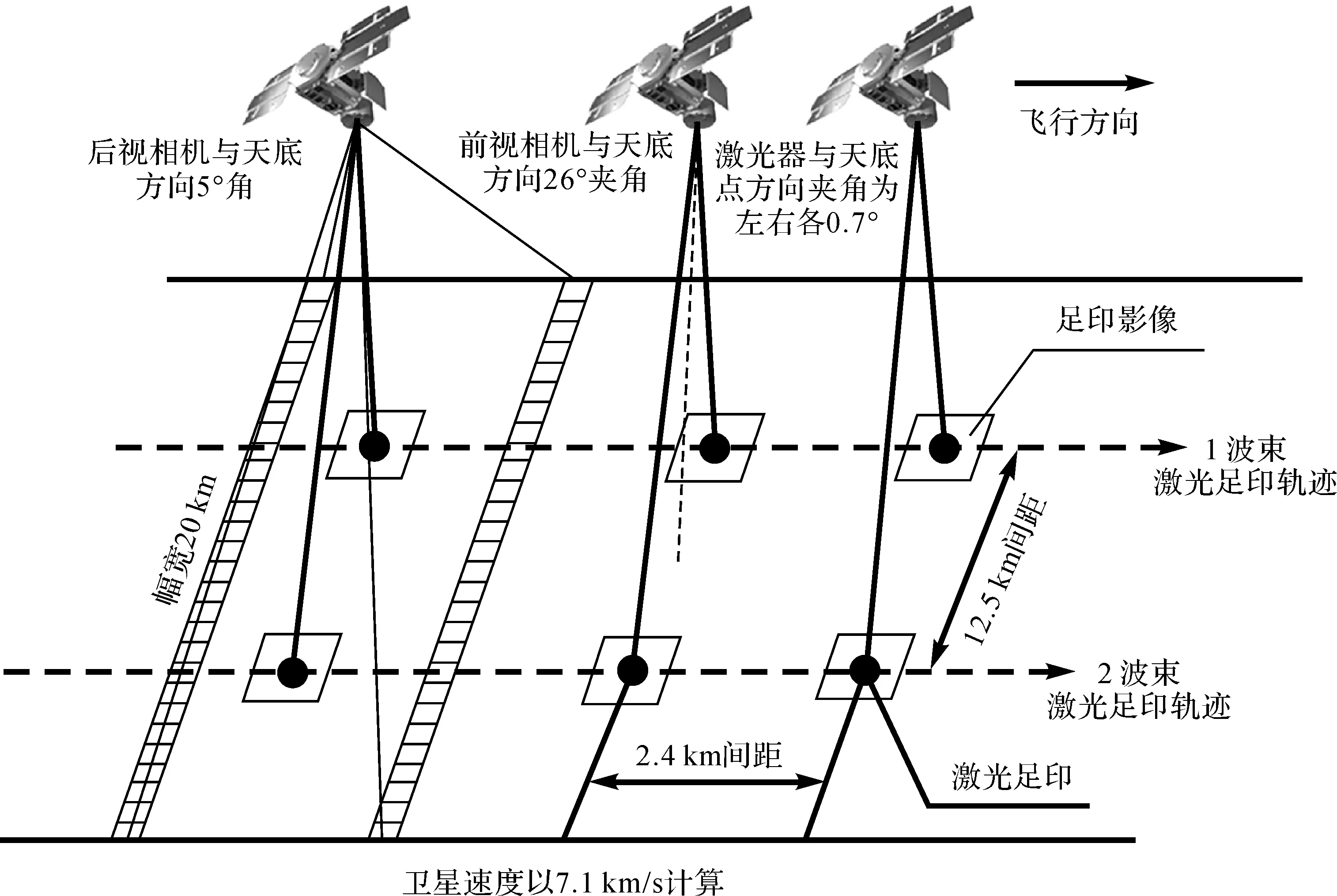
图1 高分七号卫星工作模式Fig.1 The working mode diagram of GF-7 satellite
高分七号卫星激光测高仪有两个波束,共用一个接收望远镜,如图2所示。两个波束的激光器均包括1台主份和1台备份,发射波长为1064 nm的近红外谱段,发散角设计指标均为≤60 urad,即从500 km轨道高度打到地面的光斑大小约30 m,实际在轨测量其发散角分别为38 urad和42 urad,对应地面光斑大小为19 m和21 m,优于原来的30 m设计指标;全波形采样频率为2 GHz,高于GLAS的1 GHz指标,对应时间间隔和距离分辨率分别为0.5 ns和0.075 m;采用了强弱两种增益模式记录波形数据,以适应不同地表反射率的回波强度。此外,高分七号卫星激光测高仪没有采用与GLAS直接利用恒星测量激光指向的模式,而是利用足印相机(laser footprint camera,LFC)实现对激光发射脉冲强度及地面景物成像,包括激光断面阵列(laser profile array,LPA)[19]和激光足印地物全色影像(laser footprint image,LFI),以实现激光指向测量精度的有效提升[20],足印影像的分辨率为3.2 m,量化位数14 bits。相关参数见表1。
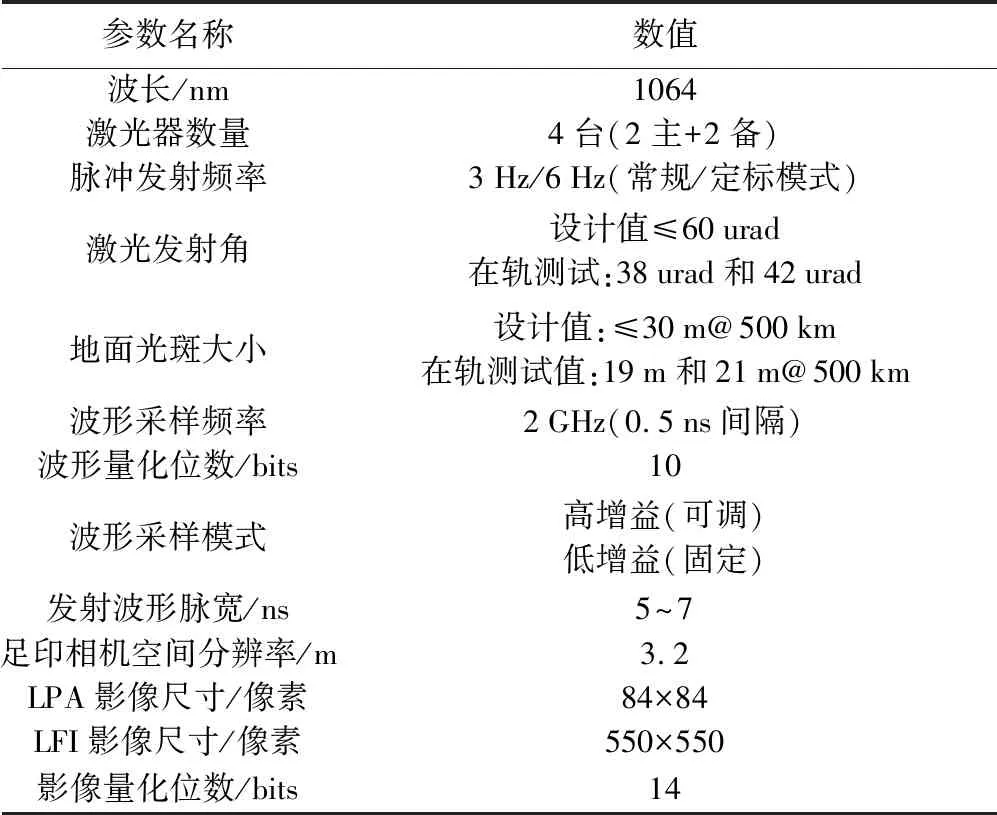
表1 高分七号卫星激光测高仪基本参数Tab.1 The basic parameters of GF-7 satellite laser altimeter
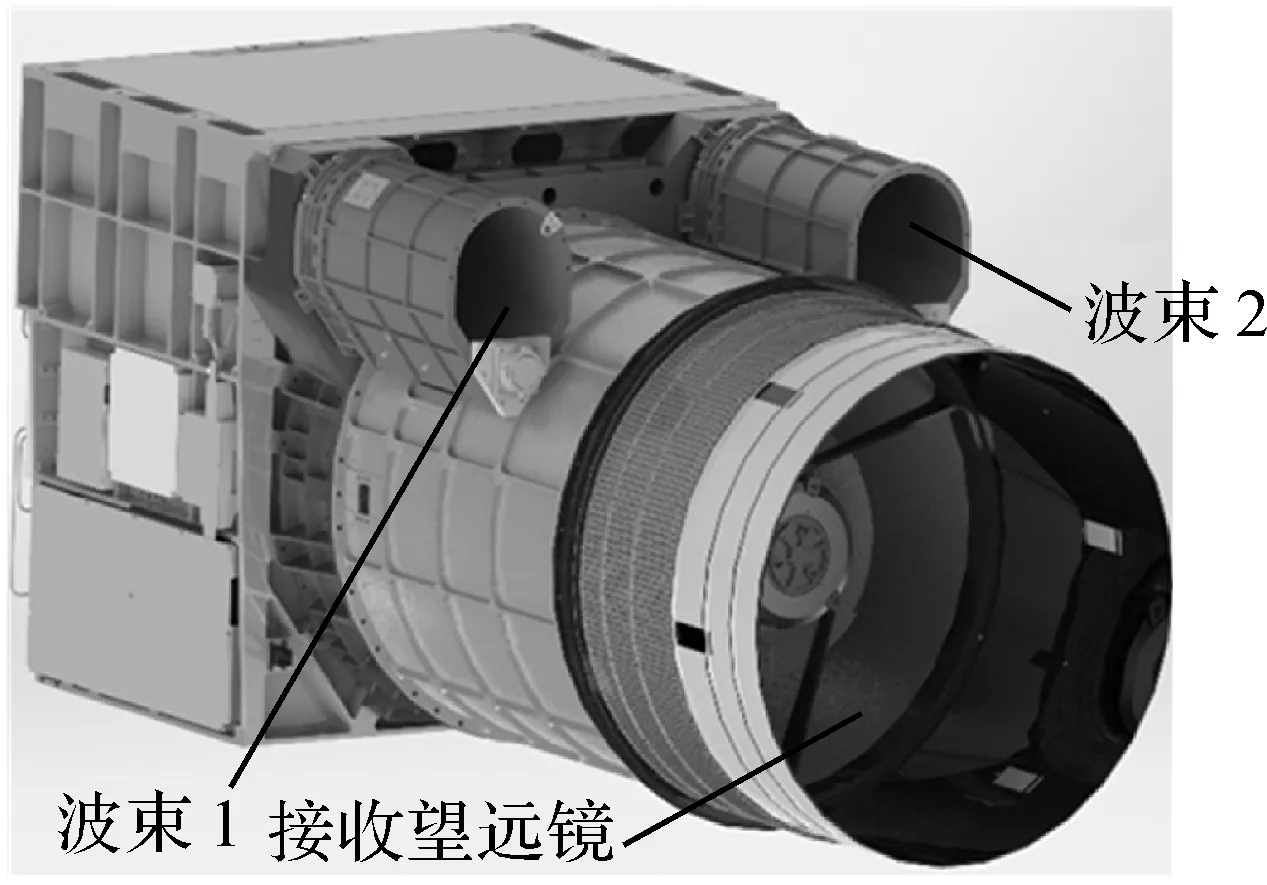
图2 高分七号卫星激光测高仪构型Fig.2 The configuration diagram of GF-7 satellite laser altimeter
2 激光测高仪无场定标方法
按卫星激光测高的基本原理,在地心地固坐标系下,激光测高仪的严密几何模型可以表示为[2,21]
(1)
且激光测高仪的3个指向角满足式(2)
cos2Ax+cos2By+cos2Cz=1
(2)
Δρ=Δρatm+dρ
(3)

(4)
高分七号激光测高仪带有足印相机,同时也通过实验室测量的方法给定了激光落点在足印地物影像LFI上的理论位置。但在实验室中受测量条件和仪器精度等因素影响,高分七号卫星激光测高仪测定的指向角存在一定误差,此外受应力释放、环境变化及震动等因素的影响,卫星入轨后激光指向与整星基准的关系也会发生变化。因此,LFI上给定的位置只能作为初值供参考,按载荷制造方的分析其平面误差应该在100 m左右,但具体数值未知,必须依赖卫星在轨后精确定标。而之前在资源三号02星的激光测高试验表明,基于地形匹配方法和30 m格网的AW3D30参考地形数据能将平面误差控制在30 m左右,此外高分七号卫星激光测高仪具有全波形采样和记录功能,波形形态与激光光斑内的地形地物特征密切相关,因此在激光测高仪与足印相机相对误差未知的情况下,本文采用了基于地形匹配和波形匹配从粗到细的无场分步定标方法。
2.1 基于地形匹配的指向角粗定标
当每个激光点的距离测量值一定时,采用不同的指向角和测距系统误差将得到不同的三维坐标,定义特定指向角和测距系统误差下的离散点集合为P,如式(5)所示
P={p(x,y,z)|(xi,yi,zi)=f(ρi,dρ,dAx,dBy),i=1,2,…,n}
(5)
式中,(xi,yi,zi)为激光足印点的三维坐标;(ρi,dρ,dAx,dBy)分别为该激光点的测距值、测距系统偏差值、激光指向角偏差值。
实际地形集合为Q,如式(6)所示
Q={q(x,y,h)|hi=g(xi,yi),(xi,yi)∈P}
(6)
式中,P和Q的关系如图3所示。

图3 基于地形匹配的激光测高仪几何定标Fig.3 The illustration of laser altimeter geometric calibration based on terrain matching
理论上存在某一组指向角和测距系统误差对应的集合P,使得P=Q,此时的指向角和测距系统误差即为真实值。但卫星激光测高过程存在一些不可消除的随机误差,实际地形集合Q本身也存在一定测量误差。因此,基于地形匹配的过程就是通过寻找最优的指向角和测距系统偏差值,使得P≈Q。图4直观显示了不同指向角误差对应的激光点高程误差分布,其中高程误差最小处对应的指向角误差即为与实际指向角最接近的偏差值。

图4 不同指向角误差对应的激光足印点高程误差分布Fig.4 The elevation error of laser footprint points corresponding to different pointing angle error
选择激光点集合P与实际地形集合Q对应点的高差平方和最小作为评价指标,即存在一组激光指向角偏差值(dAx,dBy),满足式(7)

(7)
基于地形匹配的方法找到最小值及其附近的格网点对构成一个二次抛物面,如式(8)所示
(8)
基于最小二乘拟合,可以进一步提高指向角的精度,使其更接近于真实值。
在求得指向角偏差值(dAx,dBy)后,激光点与参考地形的高程差值的均值可看作系统性测距误差dρ的初始值。经地形匹配获得(dρ,dAx,dBy)的近似真值后,可以将激光落点位置限定到一定的精度范围,之前资源三号02星的结果表明,地形匹配后的精度取决于用作参考的地形数据的本身精度和格网大小,格网值较大时激光足印点平面误差大约为地形参考数据格网大小的1~1.5倍。
2.2 基于波形匹配的无场精定标
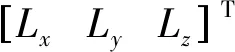
全波形数据是高分七号卫星激光测高仪的核心数据之一,也是与资源三号02星激光测高仪的本质区别所在。图5为高分七号某个激光点的实际发射波形、LPA光斑能量分布及回波波形。
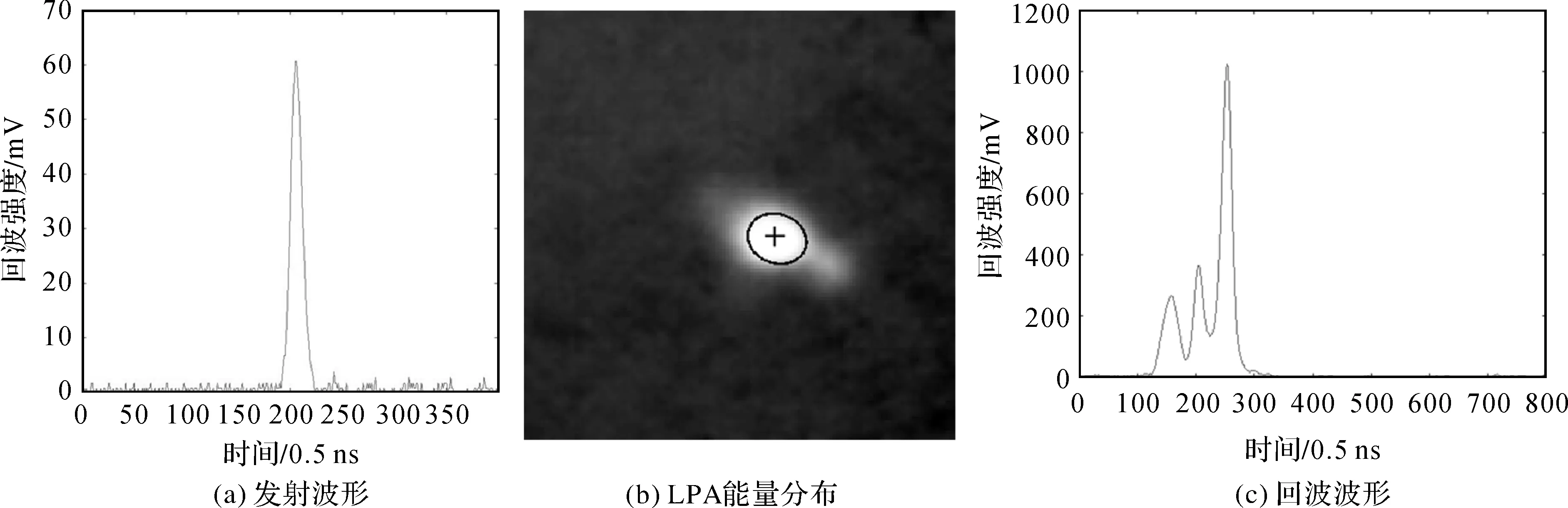
图5 高分七号某个激光点的相关数据Fig.5 A sample data of GF-7 satellite laser altimeter
笔者在文献[22]中提出了一种在实际环境中综合考虑地物反射率、发射波形及激光断面阵列(LPA)提高激光回波仿真精度方法。本文基于该思想,采用LiDAR-DSM地形数据,利用高分七号卫星激光测高仪的实际发射波形数据、足印相机记录的LPA光斑能量分布,仿真出相应位置高分七号激光点的回波数据,其中地表反射率采用同区域1064 nm波长的机载LiDAR点云强度值归一化结果。图6为高分七号卫星激光测高仪的典型地物实际回波波形数据,分别对应建筑物、水体和植被。由于在平地或水体区域回波波形随平面位置变化不敏感,而植被区域因激光有穿透性其回波波形形态较难把握。因此,本文基于实际回波波形数据的特点,筛选了地形起伏较大且无植被影响的区域,重点选取几个阶梯状的建筑物区域激光点开展波形仿真及匹配。
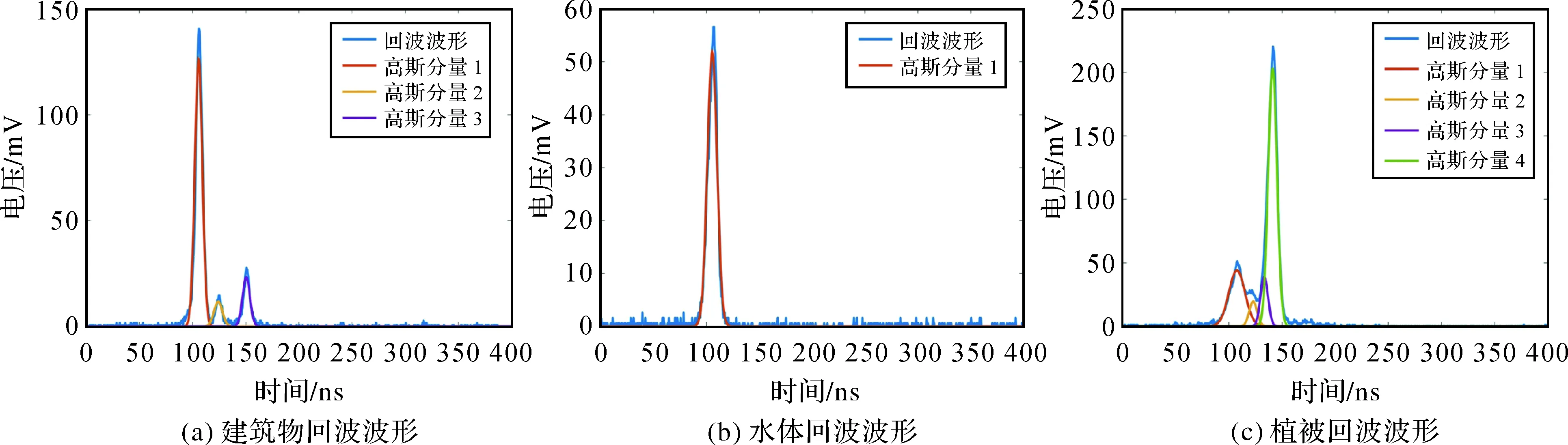
图6 高分七号激光测高仪部分典型地物波形数据Fig.6 The echo waveform of GF-7 satellite laser altimetry data on the characteristic ground objects
以2.1节计算出的激光落点位置为中心,在25 m范围内按一定间隔移动落点位置,将不同位置的仿真波形与实际的回波数据进行匹配,以多个激光点的相似度最大处的位置平均值作为实际落点位置,并反向解算出激光指向角作为精确结果。波形匹配的相似度测量可以利用经典的皮尔森Pearson相关系数计算,如式(9)所示
(9)
式中,cov(x,y)表示变量x和y的协方差;σx和σy分别代表标准差;ρ介于[-1,1]之间,越接近于1表示正相关程度越大、波形相似程度越高。此外,为了消除二异性,阶梯状的建筑物的高差信息也可以作为匹配相似度的评价准则,即同一激光点的仿真波形和实际回波波形经高斯分解后,波峰之间的距离应具有一致性。
3 试验与分析
3.1 试验数据
本文选取2019年11月13日、11月22日、11月28日、11月29日的第154、295、382和429轨共4轨高分七号卫星激光测高数据(表2)进行试验。利用90 m格网的SRTM、30 m的AW3D30和10 m的ZY3-DSM开展地形匹配获取指向角的粗定标值,然后利用某区域的1∶2000高精度DOM影像和LiDAR-DSM基础地理信息成果作为试验区,开展无场定标波形匹配获取精细的指向角和测距偏差。其中11月28日的第382轨经过波形匹配试验区,如图7(a)所示,底图为后视相机0.65 m分辨率影像,红色圆点为激光足印点示意位置;DOM影像的分辨率为0.1 m、平面精度优于1.0 m,LiDAR-DSM的点间隔约1.5 m,高程精度优于0.15 m,平面坐标系和高程基准均转为WGS-84坐标系和大地高,如图7(b)所示。落在DOM和LiDAR-DSM区域的有效激光点共65个,剔除位于水面、植被区域的点最后共保留54个点。
图7 试验区第382轨激光足印点分布及包含某激光点的参考数据示例数据Fig.7 The laser footprint distribution of the orbit.382 and the referenced data of a certain laser point

表2 试验数据基本信息Tab.2 The basic information of the experimental data
2020年6—7月,自然资源部国土卫星遥感应用中心、中国资源卫星应用中心等单位先后多次在外场实地布设地面探测器,开展高分七号卫星激光测高仪外场在轨几何定标试验并取得成功,获得了激光实地落点的精确位置,本文将其作为真值用于无场定标结果的真实性验证。
3.2 结果与分析
对4轨试验数据采用格网大小分别为90、30、10和1.5 m的SRTM、AW3D30、ZY3-DSM、LiDAR-DSM数据对不同轨的激光点,基于地形匹配的思想计算出指向角,结果见表3。试验中除382轨收集到相应的ZY3-DSM和LiDAR-DSM数据外,其他轨仅开展了基于SRTM和AW3D30的地形匹配试验。
由表3可知,波束2的指向角实验室测量值误差比波束1明显偏大,其中X方向略大于Y方向,但经地形匹配后结果比较稳定。以382轨为例,图8中直观显示了地形匹配前后沿轨向激光点高程误差对比结果,其中参考地形为AW3D30。定标前的激光点原始高程与参考地形明显存在一定系统偏差,误差较大的点是因为部分位于高层建筑上,如图8中的红圈对应的几个点。经统计,定标前误差均值为9.17 m,均方根为12.96 m;基于地形匹配修正指向角后高程误差显著减少,误差均值为0.52 m,均方根为5.71 m,说明效果非常明显。定标后的高程误差均值0.52 m可以作为测距系统偏差的初始值。
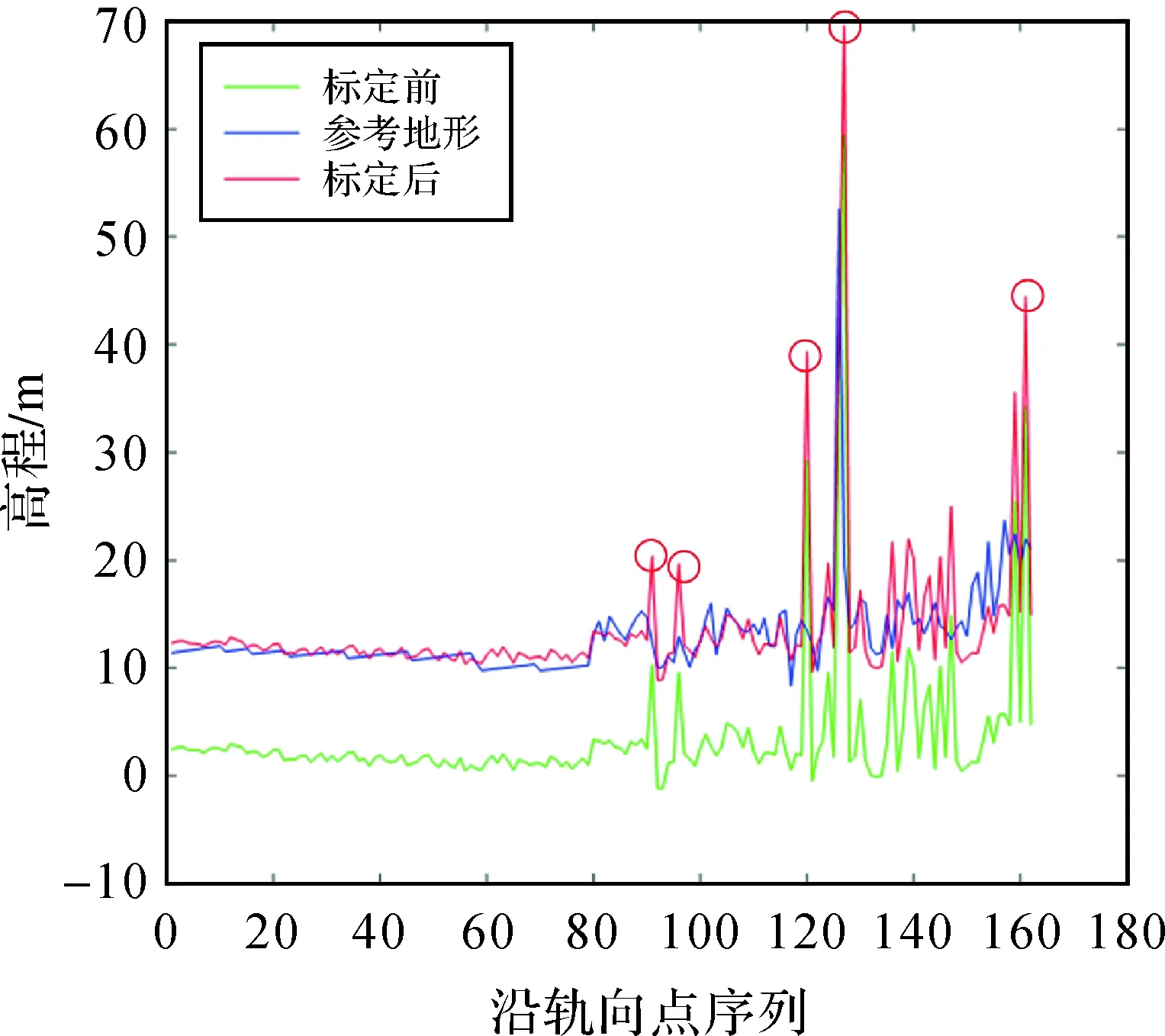
图8 第382轨地形匹配前后沿轨向激光点高程误差对比Fig.8 The laser elevation error comparison before and after terrain matching of the orbit.382
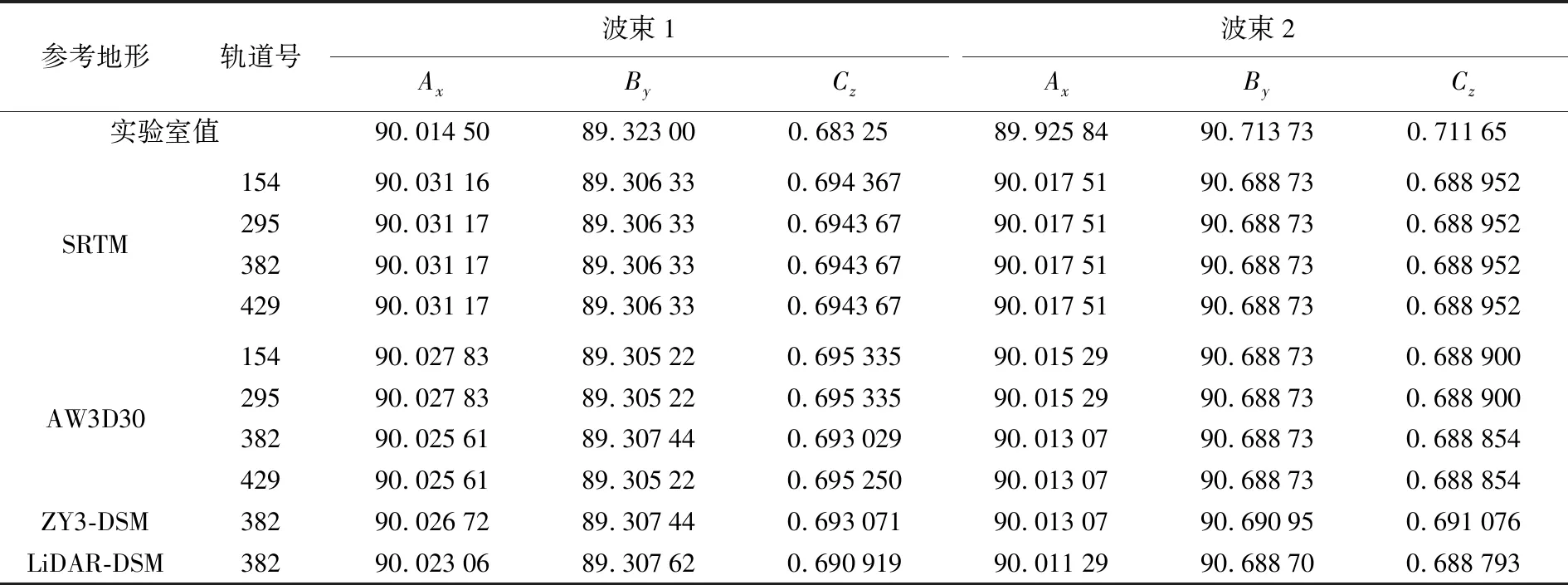
表3 采用不同参考地形基于地形匹配计算出的指向角结果Tab.3 The pointing result based on terrain matching by using different referenced data (°)
在上述基于地形匹配的定标基础上,以试验区1∶2000的DOM和LiDAR-DSM为参考进一步开展波形匹配。图9为某一个激光点对应区域的DOM、LiDAR-DSM、用于计算真实地表反射率的机载LiDAR强度值、0.65 m分辨率的后视相机影像和3.2 m分辨率激光足印影像的局部以及实际回波波形数据。
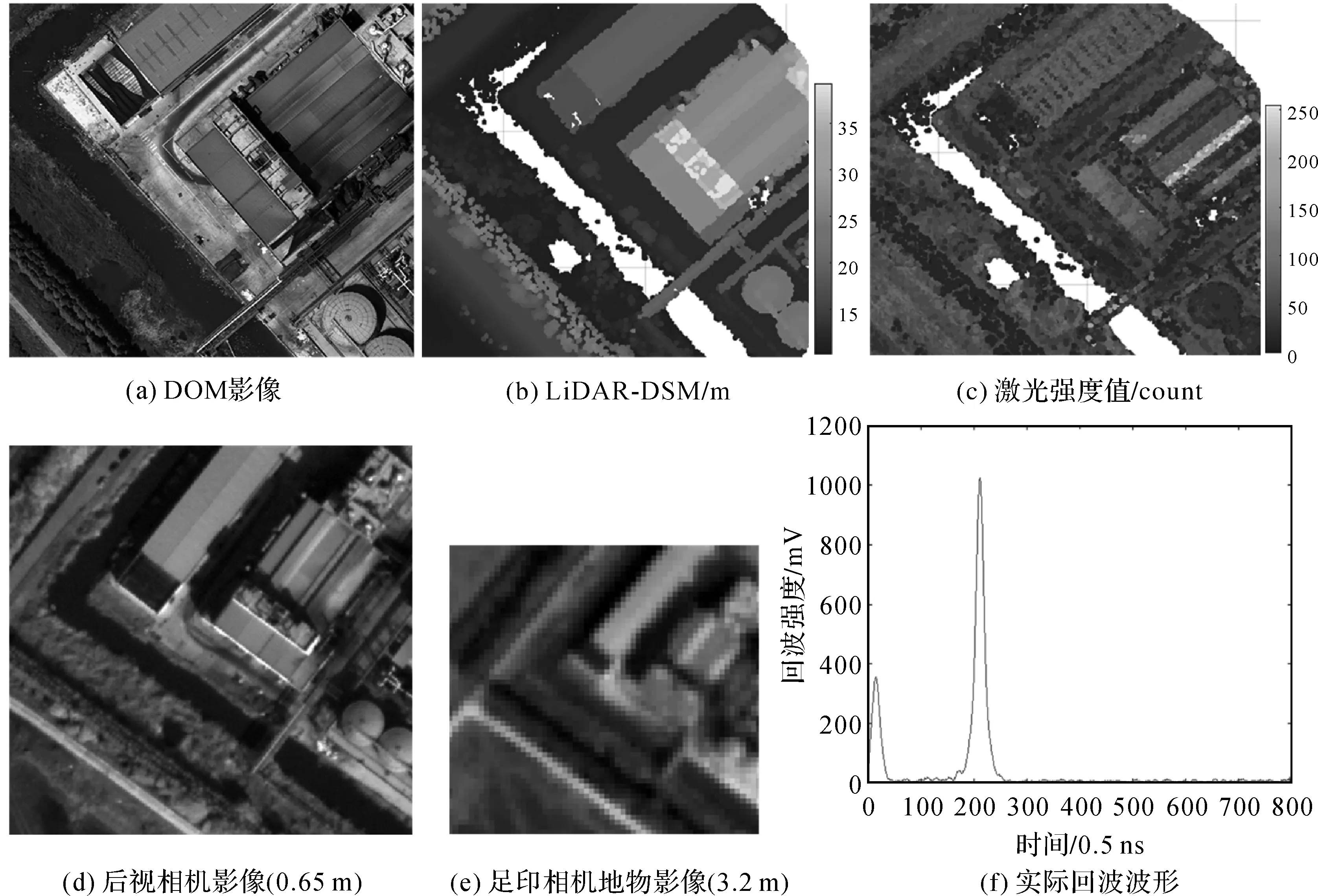
图9 波束1中某个激光点对应区域的相关数据Fig.9 The sample laser data of beam 1 on a certain region
以2 m为步距、地形匹配粗定标后的激光足印点位置为中心,在25 m范围内移动激光质心位置,基于前述波形仿真方法获得不同位置的回波仿真波形,如图10所示。
由图10可知,不同的偏移位置对应的回波仿真波形与实际波形存在不同的相似度,基于相关系数评价仿真波形和实际波形的相似度,对于波束1在东北方向移动(4.0 m,5.0 m)的地方最接近。波束2位于建筑物区域的两个激光点回波仿真波形与实际波形的相关系数如图11所示,两者在最大相关系数对应的偏移量虽然存在一定差异但具有较高的一致性,平面误差在8 m左右。

图10 波束1激光点不同平移位置的仿真波形结果Fig.10 The simulated waveform result of beam 1 on the different offset position
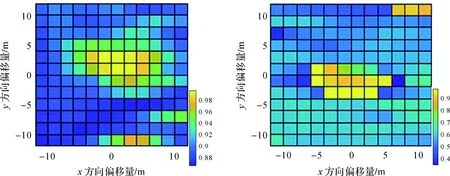
图11 波束2中城市建筑区两个激光点的仿真与实际波形相关系数分布Fig.11 The coefficient between the simulated and actual waveform on the building region of beam 2
取多组数据波形匹配的平均值即可得到该波束激光点的平面偏移量,找到相对准确的激光落点位置后,利用位于平地的激光点与对应的LiDAR-DSM的高程误差均值,可进一步修正测距偏差dρ,如式(10)所示
(10)
为了评价本文无场定标方法的激光足印点精度,利用位于典型区域的激光点初步判断其实际落点位置的正确性。如图12所示,该点所在的DOM影像南北向均为高楼,从回波波形及高程值判断该点位于平坦地面即两楼之间,而从DOM上测量两楼间隔为19.5 m。如图13所示,另一个激光点从回波波形上表示该点位于平地且高程主要位于地面(波形中左侧的低矮峰为汽车或树丛上),而从DOM上测量该点的东西向间隔为21 m,且分别有明显高架桥和建筑物。因此,可初步判断本文确定的无场定标结果计算出的激光落点位置可信,同时考虑到激光光斑边缘能量较弱,边缘区的地物对波形强度的影响小等因素,综合估算其平面精度至少应该在1/2的实际光斑大小。而2021年6—7月高分七号卫星外场在轨测试结果表明两波束激光足印直径分别为19 m和21 m,即本文试验区域采用无场定标结果的激光足印点平面精度在10 m以内。
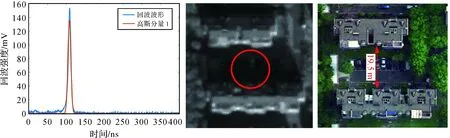
图12 南北向均为建筑物中间平坦的激光点波形、足印相机地物影像及DOM参考影像Fig.12 The echo waveform,LFI image of and the DOM on the flat terrain with the buildings in the north-south direction

图13 东西向分别为高架桥和建筑物的激光点波形、地物影像及DOM影像Fig.13 The echo waveform,LFI image of and the DOM on the flat terrain with the buildings and viaduct in the east-west direction
利用2021年6—7月高分七号卫星的外场定标数据,将地面探测器获取的激光落点实际位置作为真实值,评价无场定标结果计算出的激光落点位置误差,结果见表4。无场定标与实际落点位置的平面误差为11.597±3.693 m,最小值为7.115 m,其中外场定标的平面误差总体优于5.0 m,出现波动的原因与不同时间段的卫星姿态测量精度以及可能存在的大气湍流影响有关。
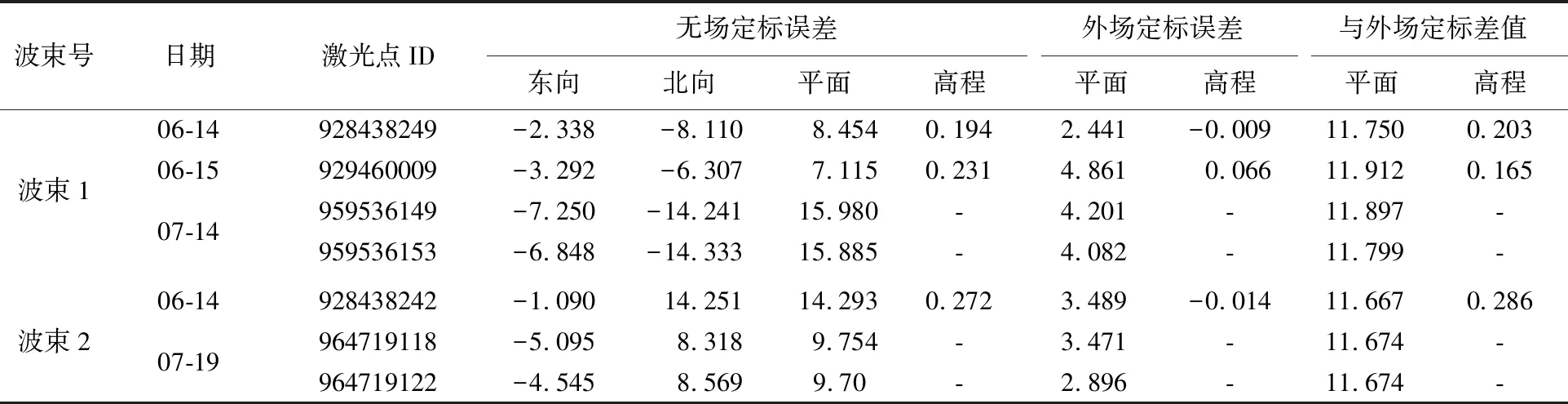
表4 基于地面探测器的高分七号卫星无场定标结果误差统计Tab.4 The error statistical result of GF-7 satellite laser altimetry data based on the ground detectors m
对于无场定标后的激光点高程测量精度,采用1∶2000 DSM数据,选取回波波形为单峰位于平坦地面的激光点,将定标后计算出的高程值与DSM数据进行对比,结果见表5,其中点号78630位于新建的平顶建筑物上,与历史DSM数据相比地表发生明显变化,统计时对该点进行了剔除。
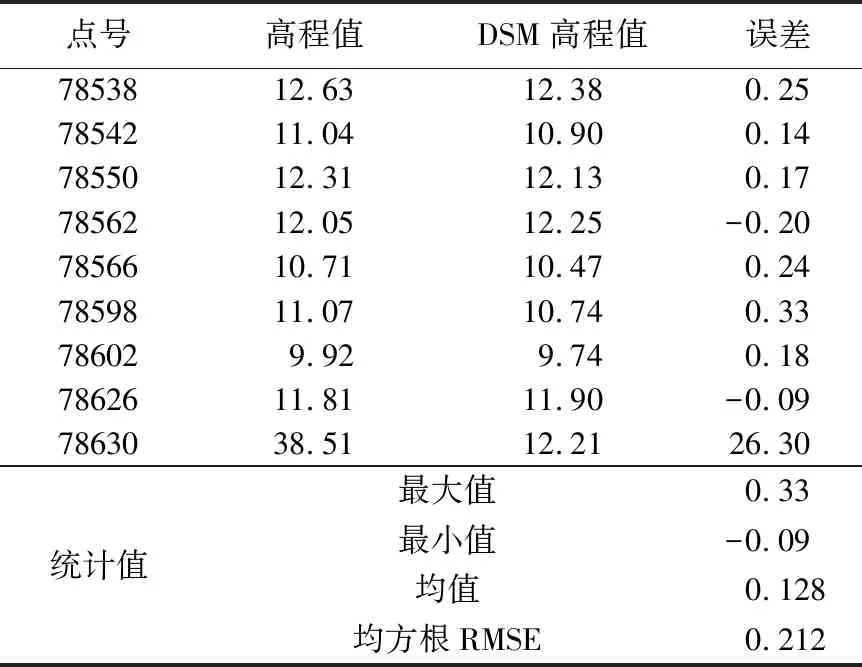
表5 无场定标后平坦地区激光绝对高程精度初步统计结果Tab.5 The elevation error statistical result of laser points on the flat region after no-field calibration m
4 总结与展望
无场几何定标对于星载多波束激光测高仪具有明显的经济优势和应用价值。受新冠肺炎疫情影响,高分七号卫星自发射后,在轨几何定标的外场工作在很长一段时间内一直无法有效开展,制约了后续相关工作的开展。本文利用SRTM、AW3D30和ZY3-DSM等地形数据以及某地区高精度的1∶2000比例尺DOM和机载LiDAR-DSM开展激光测高仪无场几何定标试验,并与外场实际定标结果进行了对比分析,经分析和验证,能得出如下结论。
(1)高分七号卫星激光测高仪的实验室指向角测量结果存在一定偏差,定标前高程方向存在约10 m的系统偏差,说明必须经过在轨定标,才能提高其测量精度。
(2)利用不同格网的大范围地形数据基于地形匹配的方法,能提高激光测高仪的指向精度,且不同轨间的标定结果非常稳定,说明了该方法具有很好的可靠性;定标前高程误差均值为9.17±12.96 m,基于地形匹配修正指向角后高程误差显著减少,误差为0.52±5.71 m。
(3)经地形和波形匹配两步无场定标后,与外场实际定标结果进行对比分析,无场定标结果与实际落点位置的平面误差为11.597±3.693 m,最小值为7.115 m,平坦地区高程精度优于0.3 m,虽然略低于外场定标结果,但能满足1∶10 000高程控制点测量需求,充分说明了本文方法的正确性。
(4)不同时间段无场定标结果与实际激光落点位置偏差存在一定波动,最小值为7.115 m,最大值为15.98 m,在激光内部指向非常稳定的前提下[23],说明激光落点位置与卫星姿态测量绝对精度相关,除进一步提高无场定标激光指向角系统误差的改正精度外,还需要围绕卫星姿态测量精度的时空变化规律进行深入研究,进一步挖掘无场定标的精度潜力。
本文研究了线性体制全波形激光测高仪无场几何定标方法,提出了综合利用地形和波形匹配的策略,并利用高分七号卫星激光测高仪成功进行了实践,相关结果在2020年受新冠肺炎疫情影响无法开展外场定标时,对高分七号卫星激光测高数据处理及应用起到了重要作用。随着新型单光子激光技术的发展,开展多波束、高重频光子计数体制的激光测高卫星无场定标将是下一步努力的方向[24-26]。
猜你喜欢
今日农业(2021年19期)2022-01-12
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
四川轻化工大学学报(自然科学版)(2021年1期)2021-06-09
空间科学学报(2020年1期)2021-01-14
防爆电机(2020年4期)2020-12-14
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
传媒评论(2017年8期)2017-11-08
中国光学(2015年5期)2015-12-09
凿岩机械气动工具(2014年2期)2014-03-01