
基于IAUKF-JPDA算法的多目标跟踪
2022-04-07 12:45武梦洁
电光与控制 2022年4期
陈 云, 邹 杰, 武梦洁
(1.光电控制技术重点实验室,河南 洛阳 471000;2.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000)
0 引言
多目标跟踪本质上就是运用传感器预测多个目标的位置和运动参数的过程。不同的传感器具有不同的特性和缺陷,单个传感器可能会导致信息缺乏,但多个传感器的使用也可能导致环境信息冗余。因此运用不同传感器跟踪目标,一是可以融合不同的传感器信息,以获得对外部环境更全面的了解,二是可以过滤不同传感器信息的冗余部分,以获得更准确的环境信息。本文研究了使用红外和激光等两种不同传感器的车载光电跟踪系统,在修正球坐标系下跟踪多个空中目标的问题。在实际情况中,测量噪声受传感器特性或外部环境的影响很大,如天气突变可能导致红外传感器数据与真实值相差过大等,不同传感器受环境影响也不同,这些都可能导致测量噪声统计特性难以估计,使得多目标跟踪精度降低。
针对以上问题,本文在无迹卡尔曼滤波器[1-2]的基础上引入自适应因子,并根据不同传感器的置信度赋予不同的权重,提出了一种改进的自适应无迹卡尔曼滤波算法(IAUKF)。通过对系统噪声或测量噪声的在线估计[3-4],在一定程度上缓解不同传感器系统噪声或测量噪声未知或变化的问题,从而提高非线性滤波的精度。在多目标跟踪场景中,必须处理量测和目标之间的数据关联和杂波的干扰问题,目前已经有许多方法来处理这种数据关联问题,例如概率数据关联(PDA)方法[5]、概率假设密度(PHD)方法[6]等。联合概率数据关联(JPDA)方法使用轨迹门限内的每一个量测与轨迹关联的概率来表示该量测与轨迹关联的程度[7-8],影响轨迹的更新,避免杂波或者量测误差造成较大的跟踪误差。为了提高多目标跟踪精度,本文将改进的自适应无迹卡尔曼滤波算法(IAUKF)和JPDA算法结合,提出了一种IAUKF-JPDA算法。仿真结果表明,所提算法相比于UKF-JPDA算法能更有效地降低多目标跟踪误差。
1 系统模型
1.1 状态空间模型
状态空间模型在修正球坐标系(MSC)下建立[9],目标跟踪坐标系如图1所示,X,Y,Z轴分别沿东、北、天的方向,方位角β∈[0,2π],俯仰角ε∈[-π/2,π/2]。
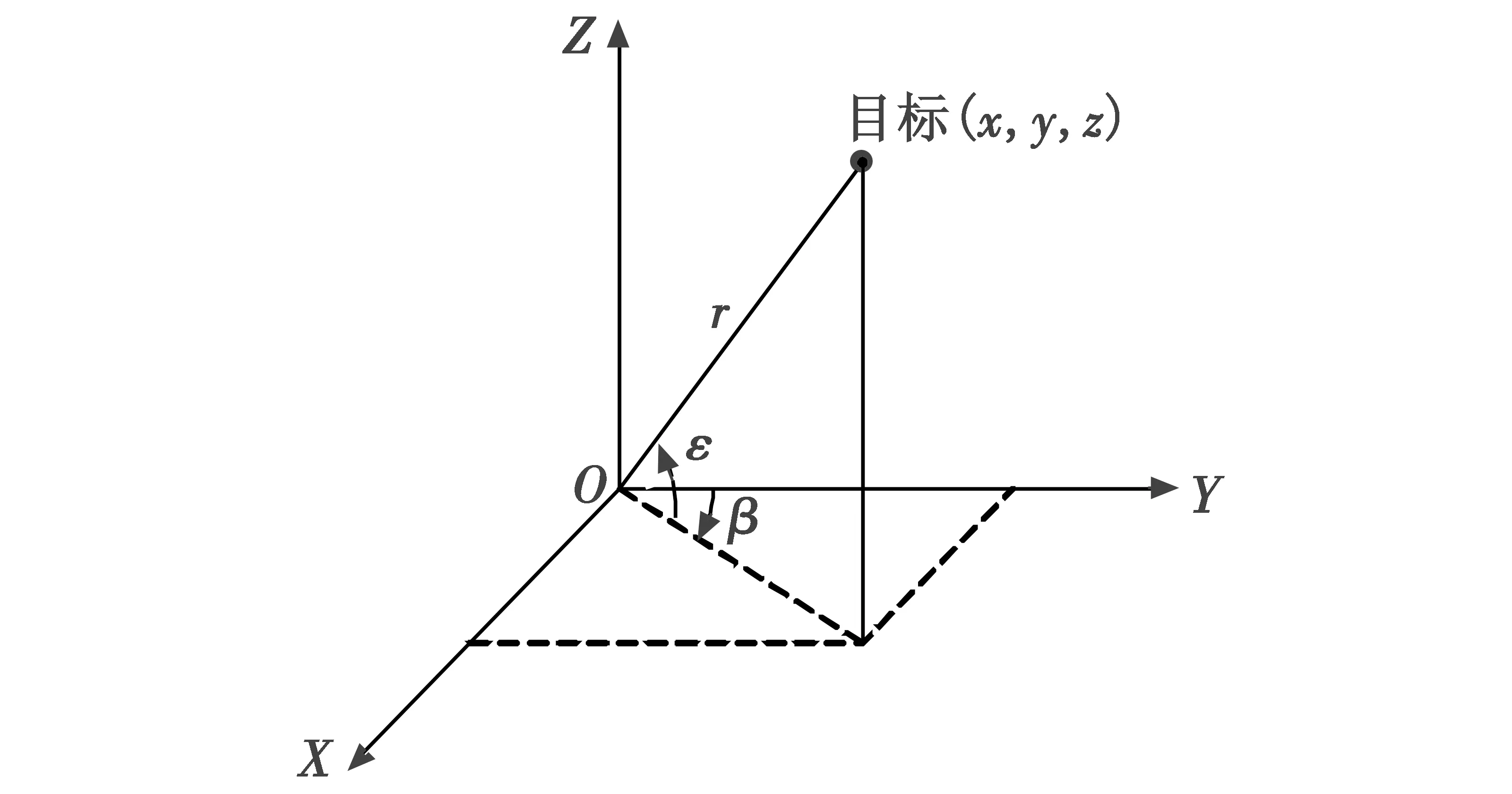
图1 目标跟踪坐标系的定义Fig.1 Definition of target tracking coordinate system
从几何关系不难得到修正球坐标系与笛卡尔坐标系分量的关系为

(1)
(2)
笛卡尔坐标系下第i个目标的相对状态向量和状态方程分别为
(3)
(4)
式中,Fk-1和wk-1~N(0,Qk-1)分别是状态转移矩阵和协方差为Qk-1的系统过程噪声。

(5)
(6)
(7)
1.2 量测模型
对于收集方位角和俯仰角的红外传感器来说,MSC下量测模型为
Zk=Hxk+vk
(8)

2 改进的AUKF算法介绍
对于典型非线性系统
(9)
式中:xk是k时刻状态变量;Zk是k时刻量测值;f是状态转移函数;h是量测函数;ωk-1和vk分别是系统和量测零均值高斯白噪声,协方差分别是Q和R。
改进的AUKF算法步骤如下所述。
1) 状态初始化。

(10)
2) 采样2n+1个Sigma点。
(11)
式中:Xi,k|k是k时刻第i个采样点;λ=α2×(n+k)-n,α是缩放因子,改变α的值可以改变Sigma点集的离散程度。
3) 状态变量的更新。
式(11)中的Sigma点经过状态方程的非线性传播后得到
Xi,k+1|k=f(Xi,k|k)
(12)
则k+1时刻预测的均值为
(13)

(14)
k+1时刻预测的协方差为
(15)

(16)
式中,ψ一般取2。
4) 量测更新过程。
Zi,k+1|k=h(Xi,k+1|k)
(17)
(18)

5) 量测噪声协方差更新。
根据Sage-Husa自适应滤波算法的思想,只能估计系统噪声或测量噪声中的一个,本文研究的多目标跟踪系统,运动模型相对固定,系统噪声比较稳定,所以系统噪声特性可以近似为已知,测量噪声受传感器特性或外部环境的影响很大,如天气和环境突变可能导致传感器数据与真实值相差过大等,这些都可能导致测量噪声统计特性难以估计,因此,本文假设系统噪声已知,引入一个自适应因子来估计测量噪声协方差[12]。
根据传统的Sage-Husa自适应思想,采用单一的自适应因子dk来估计不同传感器获得的测量数据的噪声,往往会造成较大的误差,一般不能满足实际要求。因此,本文对不同传感器测得的数据赋予不同的权重Wk,其范围是(0,1)。权重越高,对该传感器的测量噪声的统计特性的置信度越高。
(19)
式中:dk+1=(1-b)/(1-bk+2),代表自适应因子,b是遗忘因子,取值范围是(0,1);Hk+1是k+1时刻量测矩阵。
自相关协方差矩阵和互相关协方差矩阵如下
(20)

(21)
6)k+1时刻卡尔曼滤波增益矩阵、状态估计和误差协方差矩阵分别为
(22)
(23)
(24)
3 AUKF-JPDA算法
本章将改进的自适应无迹卡尔曼滤波算法融入JPDA框架来进行多目标跟踪,JPDA用轨迹门限内的每一个量测与轨迹关联的概率来表示该量测与轨迹关联的程度,影响轨迹的更新,避免杂波或者量测误差造成较大的跟踪误差。
1) 获取关联概率。

(25)

(26)

(27)
式中:Φ为虚假量测的数量;c为常数;V为杂波分布的体积;PD为检测概率;δt(θi(k+1))表示目标t是否被检测到;τj(θi(k+1))表示目标t和量测j是否有关联。
2) 状态更新和协方差更新。
将关联概率代入上文得到的滤波方程式(22)~(24)中,可得
(28)
(29)
(30)
4 仿真验证
为了验证本文所提算法的有效性,对三维场景下两个不同的多目标跟踪场景分别进行了仿真测试。
4.1 仿真场景1
在杂波环境中跟踪两个匀速直线运动目标,将本文所提算法与基于标准UKF的对应算法进行对比。选择对比的性能指标分别为:两个目标距离、方位角和俯仰角估计的均方根误差(RMSE)。第k时刻的均方根误差的定义为
(31)

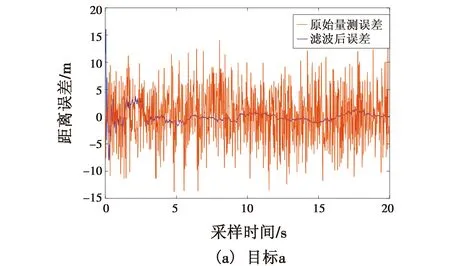

图2 场景1滤波前后的距离误差对比Fig.2 Comparison of distance error before and after filtering in Simulation 1
图3展现了本文所提算法和UKF-JPDA算法对多目标距离、方位角和俯仰角估计的RMSE,由图可得,两种算法都能有效估计目标的距离和位置,相比于UKF-JPDA算法,本文所提算法对目标位置的估计误差更小,跟踪精度更高。

图3 两个目标状态估计的RMSE(场景1)
4.2 仿真场景2
为了使本文所提算法更具说服力,在杂波环境中跟踪两个匀速转弯交叉运动目标。a和b两个目标的初始运动状态为X1=(1500 m,30 m/s,500 m,40 m/s,1000 m,50 m/s),X2=(500 m,40 m/s,1500 m,30 m/s,1000 m,50 m/s)。转弯角速率ω=0.5 rad/s,其他仿真参数与仿真场景1中相同。将轨迹门限增大到150,观察目标跟踪结果,见图4。
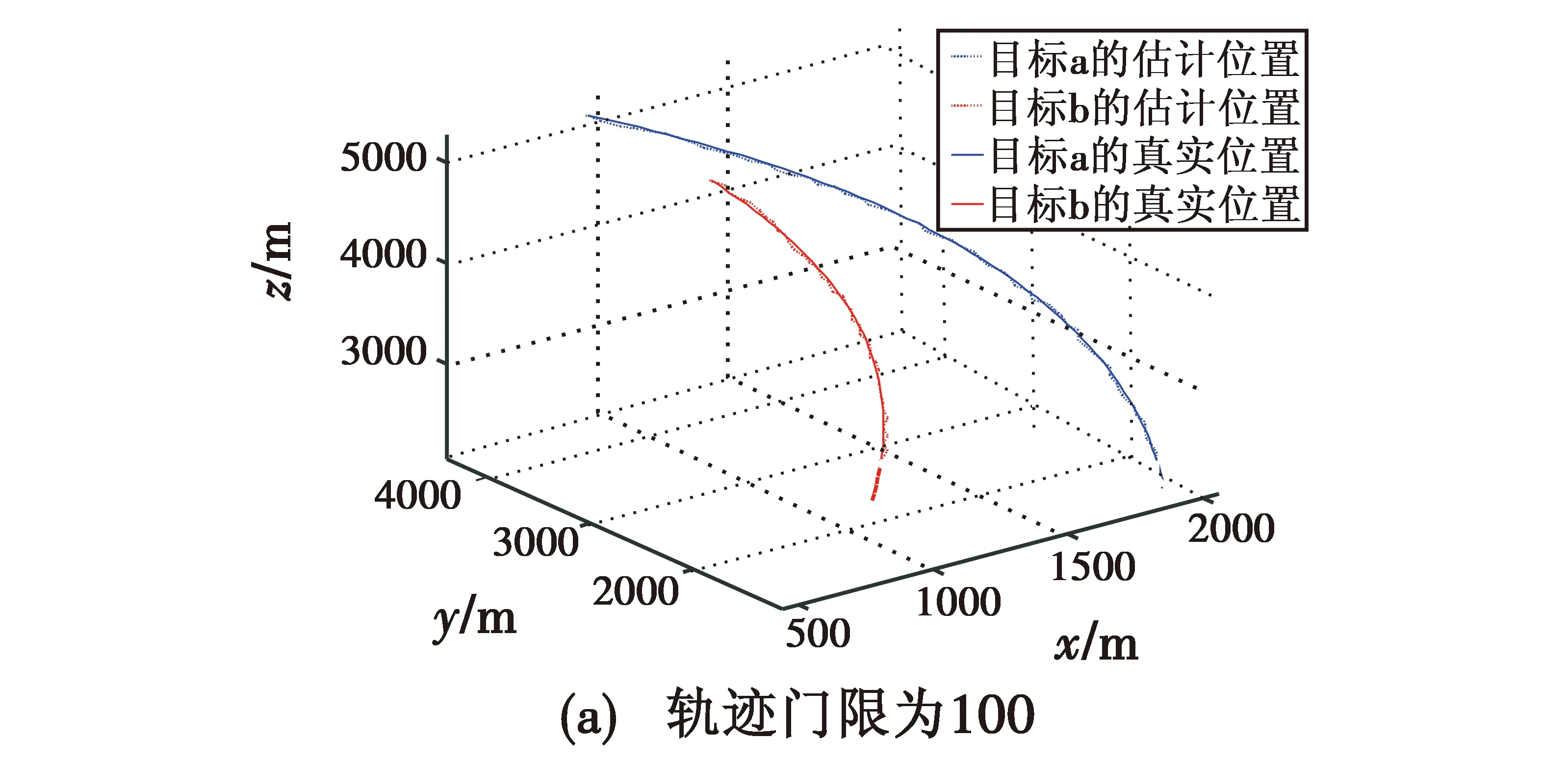

图4 不同轨迹门限下的实验跟踪结果Fig.4 Experimental tracking results under different trajectory thresholds
可以发现,对比轨迹门限为100时跟踪效果明显变差,轨迹门限过大会使多余的杂波进入到关联范围内,使得关联效果变差;表1给出了部分量测与轨迹关联的概率数值,因为杂波的影响,在轨迹门限内的量测数量不同,与航迹关联的概率数值也不同。图5展示了杂波环境下两个机动目标的观测轨迹和估计轨迹,杂波在三维空间内服从均匀分布,杂波数目为6。由图5可得,本文所提算法对杂波环境下交叉机动目标的跟踪仍然具有很好的效果。

表1 部分量测与轨迹关联的概率数值Table 1 Probability value of partial measurement associated with the trajectory

图5 场景2目标观测位置和杂波

图6展现本文所提算法和UKF-JPDA算法对多机动目标距离、方位角和俯仰角估计的RMSE。由图6可得,在交叉机动运动场景下,相比于UKF-JPDA算法,本文所提算法对目标位置的估计误差更小,跟踪精度更高。

图6 两个目标状态估计的RMSE(场景2)
5 结论
本文在联合概率数据关联框架下,通过融入改进的自适应无迹卡尔曼滤波方法,采用加权融合的方式处理与目标关联的量测,完成多传感器测量遇到的非线性滤波问题,实现了在杂波环境中的空中多机动目标跟踪。仿真结果表明,所提新算法比UKF-JPDA算法具有更好的跟踪性能,未来的工作应将重点放在对该算法对多强机动目标的跟踪研究上。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
新世纪智能(数学备考)(2021年9期)2021-11-24
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
当代陕西(2019年15期)2019-09-02
计算机应用与软件(2019年2期)2019-04-01
经济研究导刊(2018年19期)2018-07-24
学苑创造·A版(2018年11期)2018-02-01
雷达学报(2017年3期)2018-01-19
读者(2017年5期)2017-02-15
