
适用于无砟轨道线路的梁式临时架空装置研究
2022-04-07 06:07左照坤赵欣欣高芒芒刘晓光鞠晓臣
中国铁道科学 2022年2期
左照坤,赵欣欣,高芒芒,刘晓光,鞠晓臣
(1. 中国铁道科学研究院研究生部,北京 100081;2. 中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081)
截至2020年底,我国高速铁路运营里程已达3.8 万公里,稳居世界第一。由于无砟轨道具有良好的平顺性、稳定性和耐久性,且养护工作量少,可避免道砟飞溅等问题,目前高速铁路线路大多采用无砟轨道。我国部分高速铁路运营时间已超过10年,无砟轨道在长期列车运行荷载以及外部环境耦合作用下,不可避免地会产生一些病害,导致线路轨道几何形位不良,危及列车行驶安全,需要及时维修[1-6]。
铁路既有线的临时架空,是指通过临时架空装置将线路钢轨临时支撑,以保证在轨道结构维修期间列车能够正常运营,避免因施工造成行车中断或延误。目前针对无砟轨道线路的临时架空装置研究相对较少,传统的架空装置对无砟轨道线路的适用性较差,具体表现为施工安装不便、列车通行速度低、缺少针对架空装置的临时架空线路轨道静态几何不平顺容许偏差管理值[7-11]。图1为采用传统的轨束梁和工字钢梁架设临时线路的结构示意,可知轨束梁和工字钢梁是由多根松散的钢轨或工字钢捆扎在一起组成,现场施工繁琐、稳定性差,难以适应高速铁路线路维修时间紧、可靠性要求高的特点。对于传统的轨束梁、工字钢梁和D型便梁等架空装置,《高速铁路工务安全规则》(试行)[8]规定列车通行速度不超过45 km·h-1,对于长区段的线路架空维修工程,会造成列车晚点,在一定程度影响了运输秩序。目前,为保证临时架空线路行车安全,一方面依据《高速铁路工务安全规则》(试行)[8]对行车速度进行控制,另一方面则依靠有经验的施工人员对临时架空线路的轨道静态几何不平顺进行测量和调整,尚未有针对临时架空线路的轨道静态几何不平顺容许偏差管理值。

图1 轨束梁和工字钢梁架设临时线路结构示意图
为适应高速铁路无砟轨道线路临时架空需求,缓解线路病害维修对列车运行秩序的影响,本文结合无砟轨道线路结构特点,研究提出满足列车80 km·h-1速度通行的梁式架空装置变形设计指标,设计梁式临时架空装置,并运用有限元软件对架空装置进行静力检算和动力性能分析;针对所设计的架空装置,提出临时架空线路轨道静态几何不平顺容许偏差管理值,以期为高速铁路无砟轨道线路的病害整治提供技术支撑,为我国相关规范的修订提供参考。
1 架空装置设计
架空装置主要用于临时支撑既有线路,同时能够在架空区段留出一定的施工空间来修复轨道病害,因此拟定其结构形式为梁式,其设计可参考梁式桥结构设计。与一般桥梁不同的是,用于无砟轨道局部病害维修的架空装置一般是一种单线的跨度较短的特殊结构,临时架空区段的行车速度也相对较低,现有桥梁规范并不能直接用于指导架空装置结构设计。
在梁式桥的设计中,标准规范[12-13]对梁体横、竖向变形和扭转变形都进行了相应规定,以保证轨道的平顺度和梁体的承载能力。轨道的几何线形是影响列车行驶安全性和旅客乘坐舒适性的最直接因素,研究参考标准规范[12-16]的规定及其制定思路,从轨道几何不平顺的角度提出用于指导架空装置结构设计的变形设计指标,并据此设计架空装置。
1.1 架空装置变形设计指标
目前我国高速铁路无砟轨道结构主要有CRTS Ⅰ型板式、CRTS Ⅱ型板式、CRTS Ⅲ型板式和双块式4种,双块式无砟轨道一般为纵向连续的结构,而板式无砟轨道中每块轨道板长度在4~7 m 不等,因此本文拟定临时架空装置跨度不超过10 m。根据《高速铁路无砟轨道线路维修规则》[15]和《普速铁路线路修理规则》[16],轨道动态几何不平顺管理针对的波长范围为1.5~42.0 m,不适用于临时架空区域的轨道状态评价,而轨道静态几何不平顺管理采用10 m 弦测法,可用于指导跨度约10 m的临时架空区域轨道变形控制。
对于轨道静态几何不平顺管理值,《高速铁路无砟轨道线路维修规则》[15]按200~250 和250~350 km·h-1的2 个速度等级给出,《普速铁路线路修理规则》[16]按0~80,80~120,120~160和大于160 km·h-1的4 个速度等级给出。临时架空线路通行速度为80 km·h-1,可知,《普速铁路线路修理规则》[16]对轨道静态几何不平顺管理值的规定更适用于指导临时架空装置的设计。
为满足临时架空线路80 km·h-1速度通行要求,选取《普速铁路线路修理规则》中80~120 km·h-1速度等级的轨道静态几何不平顺管理值,见表1。表1中,作业验收管理值为线路经过大修、计划维修或临时补修后的质量检查标准,计划维修管理值是应安排轨道维修计划的质量管理标准,临时补修管理值是应及时进行轨道整修的质量管理标准,限速80 km·h-1是为保证列车运行平稳性和舒适性,需立即限速并进行整修的质量管理标准,高低和轨向不平顺值对应于10 m 弦测量的最大矢度值。

表1 轨道静态几何不平顺容许偏差管理值 mm
根据工程实践,高速铁路无砟轨道线路临时架空维修期间,每晚有天窗施工点可上线施工和检查,如有必要可及时维修以保证架空装置工作状态,因此,本研究制定设计阶段轨道几何不平顺总限值取表1中计划维修与临时补修中对应数值的均值,即水平、高低、轨向的总限值分别为10.0,10.5和9.0 mm,其中高低和轨向不平顺对应于10 m弦测量的最大矢度值。
在静力荷载作用下,临时架空线路的轨道几何不平顺主要包括架空装置变形引起的不平顺和轨道随机不平顺2 部分。因此,为得到架空装置变形设计限值,需将设计阶段轨道几何不平顺总限值扣除轨道的随机不平顺值。临时架空线路的轨道随机不平顺受到施工影响,轨道状态弱于正常运营条件下的高速铁路,但应达到正常运营条件下普速铁路的标准。对我国典型普速铁路轨道静态几何不平顺实测值进行统计分析,确定高速铁路临时架空区域轨道随机不平顺的水平、高低和轨向不平顺值为分别为5.0,4.5 和3.5 mm。将设计阶段轨道几何不平顺总限值扣除轨道随机不平顺后即得到架空装置变形设计限值,见表2。

表2 满足80 km·h-1速度通行的梁式架空装置变形设计限值mm
1.2 架空装置总体布置与设计
以我国高速铁路工程中应用较多的CRTS Ⅱ型板式无砟轨道为例,设计适用于无砟轨道病害修复的临时架空装置。图2为路基地段CRTS Ⅱ型板式无砟轨道结构横断面,由上至下依次为钢轨、扣件、轨道板、水泥乳化沥青砂浆层和支承层。为最大限度满足轨道病害修复需求[4],拟采用架空装置替换原轨道结构中的轨道板和水泥乳化沥青砂浆层,实现对上部钢轨的临时支撑。
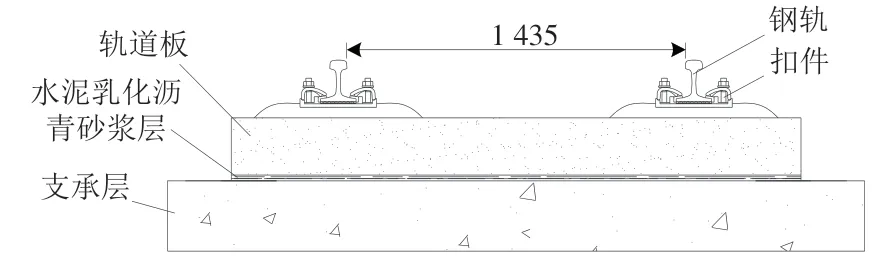
图2 路基地段CRTS Ⅱ型板式无砟轨道结构横断面(单位:mm)
图3为临时架空线路布置图,由上至下依次为钢轨、扣件、钢垫梁、支座、限位装置和支承层。架空装置包括钢垫梁、扣件、支座和限位装置4 部分。钢垫梁作为架空装置的主体结构,由2 根纵梁和4根横梁组成,纵梁两端通过支座支撑于原轨道结构的支承层上,纵梁上翼缘则通过扣件与钢轨连接,在支座位置利用限位装置对钢垫梁进行限位和固定。

图3 临时架空线路布置图(单位:mm)
本文主要对钢垫梁结构设计进行详细叙述。钢垫梁采用与CRTS Ⅱ型轨道板尺寸相匹配的框架结构,由2 根纵梁、4 根横梁组成,横梁又分为端横梁与中间横梁,纵梁与横梁之间通过高强螺栓连接,可在施工之前预拼装成整体,如图4所示。CRTS Ⅱ型标准轨道板长6 450 mm,线路标准轨距为1 435 mm,因此拟定钢垫梁总长6 300 mm,计算跨度5 200 mm,两纵梁横向中心距为1 505 mm。在CRTS Ⅱ型无砟轨道中,钢轨底面距离支承层顶面高度330 mm 左右,因此拟定钢垫梁高度250 mm,留出约80 mm 的空间用于安装支座和扣件。

图4 钢垫梁平面示意图(单位:mm)
纵梁采用Q345qC钢板焊接而成,如图5所示。为保证梁体具有足够的承载能力,同时便于梁端处限位装置的安装,纵梁采用变尺寸的箱型截面,即梁两端972 mm 段上下翼缘板截面尺寸530 mm×30 mm,梁中间4 240 mm 段上下翼缘板截面尺寸730 mm×30 mm,不同区段采用直线过渡,两翼缘板上下顶面距离250 mm。两腹板截面尺寸190 mm×24 mm 保持不变,中心距180 mm。在腹板与翼缘板之间按一定间隔设置加劲板,在横梁处将加劲板延伸出翼缘,用于连接横梁。
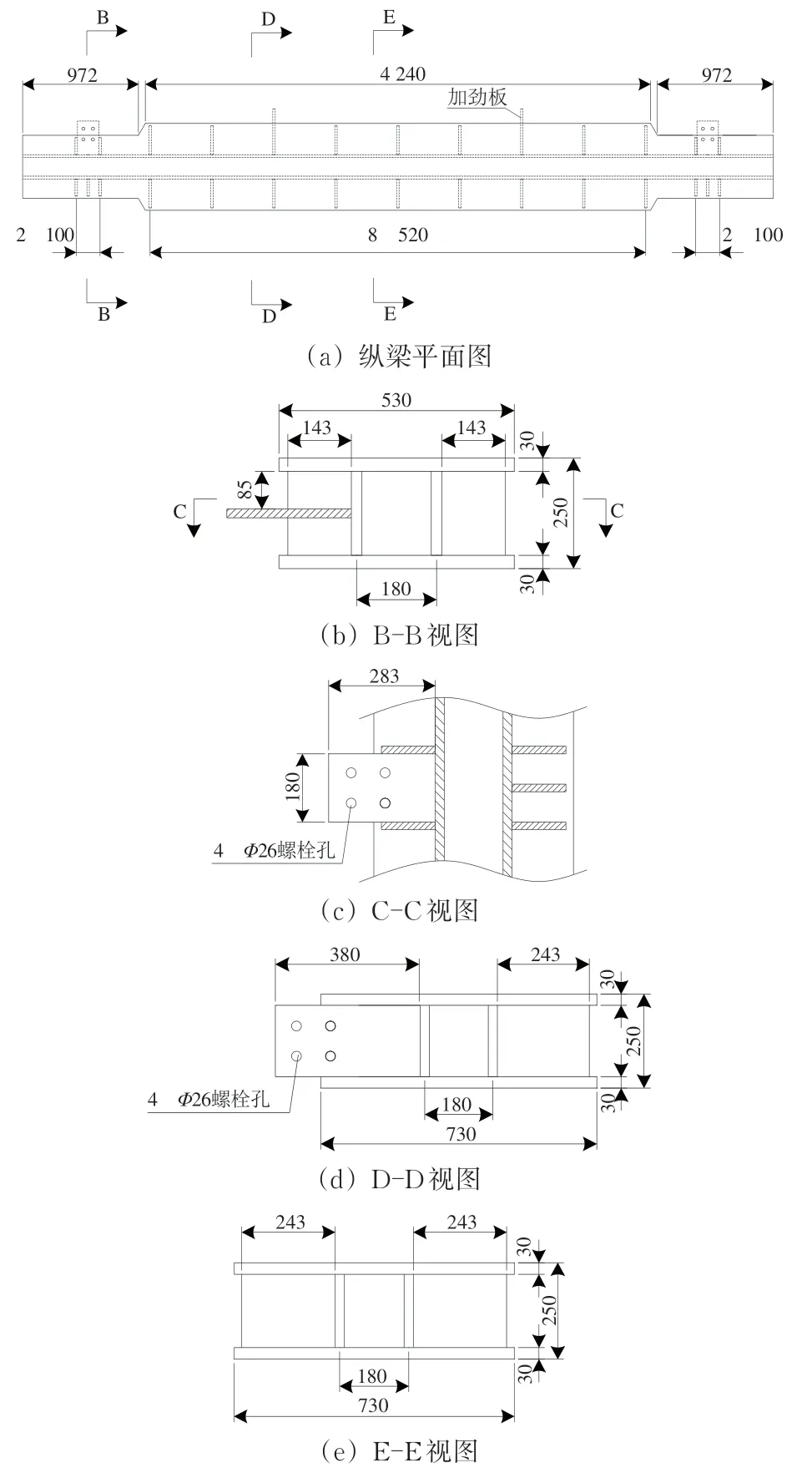
图5 纵梁结构示意图(单位:mm)
图6为横梁结构示意,采用2 支C 形构件背对组成,C 形构件由16 mm 厚Q345qC 钢板焊接而成,并在其两端设有直径26 mm 螺栓孔。端横梁水平设置,中间横梁竖直设置。
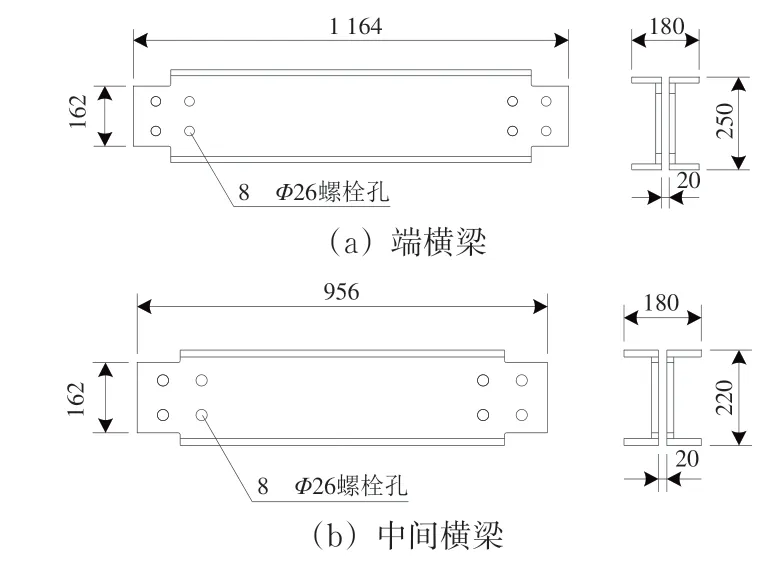
图6 横梁结构示意图(单位:mm)
与传统轨束梁和工字钢梁相比,本文所设计的架空装置具整体性好、现场施工便捷的特点,能够更好地与无砟轨道结构相匹配。
2 架空装置静力检算与动力性能
2.1 静力检算
在对架空装置变形进行静力检算时,应考虑钢轨、扣件和支座的影响,根据《铁路列车荷载图式》[17]选用ZK 特种活载。根据影响线,按架空装置跨中竖向位移最不利施加ZK 特种活载,计算其跨中竖向位移,计算值不得超过表2中对架空装置变形高低的设计限值;将1根车轴以完全偏载的形式作用于架空装置跨中位置,轴重250 kN(即1根ZK特种活载轴重),计算架空装置跨中两纵梁竖向位移差值,计算差值不得超过表2中对架空装置变形水平的设计限值;在架空装置跨中位置施加100 kN 的横向摇摆力,计算其跨中横向位移,计算值不得超过表2中对架空装置变形轨向的设计限值。
采用ABAQUS建立有限元模型,如图7所示。模型包括钢垫梁、钢轨、扣件和支座。扣件位于钢轨与钢垫梁之间,采用弹簧模拟,弹簧刚度为25 kN·mm-1。钢垫梁模型尺寸与拟定的设计尺寸一致,钢材密度为7.85 g·cm-3,弹性模量为210 GPa,泊松比为0.3。钢轨采用60 kg·m-1型钢轨,材料属性与钢垫梁所用钢材一致。支座为橡胶承压板,刚度为2 500 kN·mm-1。钢垫梁、钢轨和支座均采用线弹性模型,单元类型为C3D8R 六面体线性减缩积分单元,其中钢垫梁单元尺寸约20 mm、钢轨单元尺寸约10 mm、支座单元尺寸约5 mm。

图7 临时架空线路有限元模型
4 个支座底部平面施加3 个方向的位移约束,支座位置钢垫梁翼缘侧边施加y方向位移约束,钢轨两端截面上施加x向位移对称约束和绕y轴旋转、绕z旋转的对称约束。
根据有限元计算,在ZK 特种活载作用下,钢垫梁跨中竖向位移最大值5.24 mm;在单根轴重250 kN(即1 根ZK 特种活载轴重)完全偏载作用下,钢垫梁跨中两纵梁竖向位移差值3.38 mm;在架空装置跨中位置施加100 kN 的横向摇摆力,横向位移最大值0.27 mm。可知,本文所设计的架空装置符合表2中架空装置变形设计限值的要求。
2.2 动力性能
为进一步考察所设计架空装置在行车条件下的工作性能,对临时架空线路进行车-桥动力耦合分析[18-19]。列车运行中应满足既有规范对安全性和舒适性的要求[12-14],安全性要求即列车运行中脱轨系数不大于0.80,轮重减载率不大于0.60,舒适性要求即列车运行中Sperling 舒适度指标W≤2.50 为优,2.50<W≤2.75 为良,2.75<W≤3.00 为合格,同时要求车体竖向加速度不超过0.13g,车体横向加速度不超过0.10g。
2.2.1 计算模型
1)车辆模型
基于架空装置所在线路的运营情况,本计算中的列车采用CRH380BL 动车组,16 节编组。设车辆沿直线线路作等速运动,车体关于质心左右前后均对称,各悬挂弹簧及轮对定位弹簧均为线性弹簧,所有悬挂系统之间的阻尼均为黏性阻尼,车体、转向架和轮对均为刚体且均在基本平衡位置附近作小位移振动。考虑车体和转向架的横移、浮沉、侧滚、点头、摇头自由度,轮对的横移、摇头自由度,轮对的沉浮和侧滚利用轮轨密贴理论确定,故二系悬挂4 轴车共有23 个自由度,推广至本模型6 轴车则有27 个自由度。可由直接平衡法求得其各部件的运动方程。
2)桥梁模型
桥梁即为架空装置,是基于Midas Civil建立的多自由度有限元模型。钢垫梁纵梁、横梁均采用空间梁单元模拟,橡胶支座采用弹簧模拟。钢垫梁材质属性与上述静力检算中有限元模型保持一致,弹簧刚度2 500 kN·mm-1。在现场应用中,可能会同时采用多片钢垫梁架设较长的临时线路,与单片钢垫梁相比更为不利,因此有限元模型选取3 片钢垫梁组成的3 跨简支结构。同时,为模拟列车进出桥前后的状态,在桥头两侧各考虑了4根Ⅲ型混凝土轨枕组成的过渡区域。对于每片钢垫梁,在梁一端施加纵向、横向和竖向的位移约束,而在另一端施加横向和竖向位移约束;对于混凝土轨枕,则同时施加纵向、横向和竖向的位移约束。架空装置结构动力分析模型如图8所示。
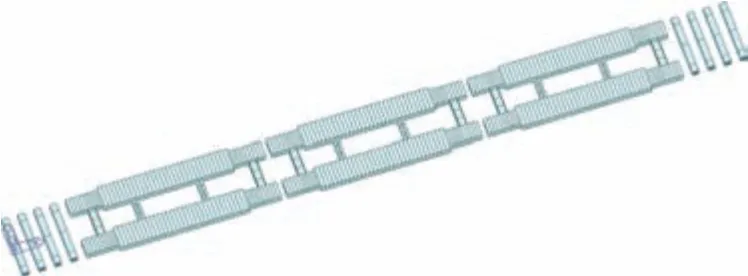
图8 架空装置结构动力分析模型
3)轨道不平顺
以我国典型普速铁路干线不平顺样本作为轨道不平顺激励的基准,计算中采用不平顺样本序列全长90 m,不平顺测点间距0.1 m,最大轨向不平顺为3.805 mm,最大高低不平顺为5.162 mm。采用的轨道不平顺样本如图9所示。

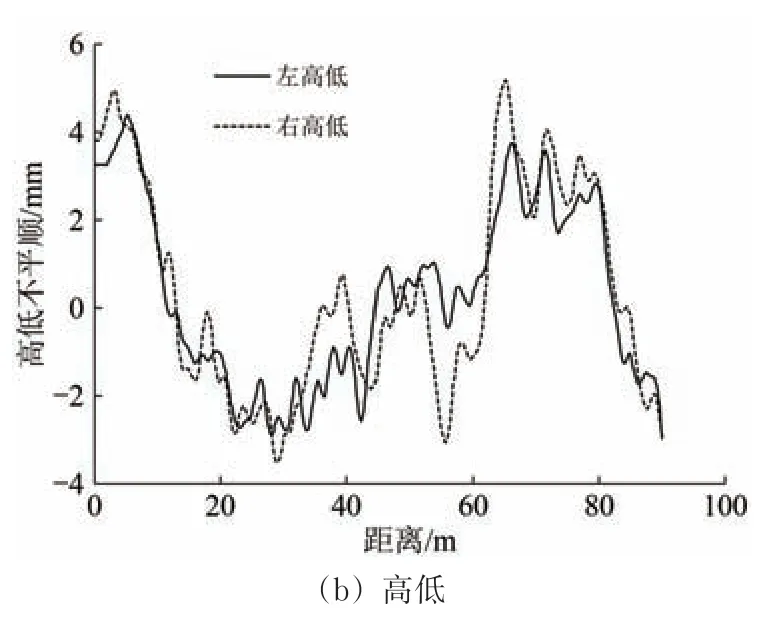
图9 轨道不平顺样本
4)轮轨间相互作用关系
轮轨间相互作用力作用于左右轮轨接触点,其中法向上作用力的数值由轮轨密贴理论确定,切向作用力的数值由Kalker蠕滑理论确定。
2.2.2 计算结果
计算车速范围为40~120 km·h-1,每10 km·h-1为1个速度等级。图10为车辆通过临时架空线路时安全性指标最大值随车速变化曲线。由图可知:脱轨系数随车速增大而增大,在车速80 km·h-1时为0.21,满足限值要求,在车速110 km·h-1时超出限值0.8;轮重减载率随速度增大而增大,在车速80 km·h-1时为0.52,满足限值要求,在车速90 km·h-1及以上时超出限值0.60。

图10 安全性指标随车速变化曲线
图11 和图12 分别为Sperling 指标和车体加速度随车速变化曲线。由图可知:在40~120 km·h-1速度范围内,竖向Sperling 指标最大为2.859,满足合格标准,横向Sperling 指标最大为2.732,满足良;车体竖向加速度最大为0.652 m·s-2、横向加速度最大为0.534 m·s-2,均满足限值标准。可知,本文所设计的临时架空装置具有良好的动力性能,能够满足列车通行速度80 km·h-1的要求。

图11 Sperling指标随车速变化曲线

图12 车体加速度随车速变化曲线
3 临时架空线路轨道静态几何不平顺容许偏差管理值
轨道几何不平顺是引起列车振动、轮轨动力作用增大的主要根源,对行车安全性和乘坐舒适性有着重要影响,因此在临时架空线路运营期间需定期对轨道几何不平顺进行检测,确保其不超过容许偏差管理值。轨道动态几何不平顺是由通行列车或检测车检测得到,检测结果已经包含了架空装置的动力响应,因此,对列车通行速度不超过80 km·h-1的临时架空线路,轨道动态几何不平顺容许偏差管理值应按《普速铁路线路修理规则》[16]中小于等于80 km·h-1速度等级的规定执行。而对于轨道静态几何不平顺,检测值并未反映架空装置变形的影响,行车过程中这一变形又会引起轨道几何状态的改变,因此,以下针对前述所设计的架空装置,提出相应的临时架空线路轨道静态几何不平顺容许偏差管理值。
静力荷载作用下,临时架空线路的轨道几何不平顺主要包括架空装置变形引起的不平顺和轨道随机不平顺2 部分。在设计阶段,为制定架空装置变形设计限值,是将设计阶段轨道几何不平顺总限值扣除轨道的随机不平顺,此时轨道随机不平顺是由典型普速铁路的轨道静态几何不平顺实测值统计分析得到,是已知值。而在运营阶段,架空装置设计参数是已知的,在给定荷载作用下可计算出由架空装置变形引起的轨道几何不平顺,为考虑架空装置变形对轨道几何状态的改变,将运营阶段轨道几何不平顺总限值扣除由架空装置变形引起的轨道几何不平顺即得到临时架空线路轨道静态几何不平顺容许偏差管理值。
运营阶段,轨道几何不平顺总限值的确定应依据《普速铁路线路修理规则》[16]中相应速度等级的规定。考虑到临时架空线路上列车是按限速80 km·h-1通行,同时由于实际工程中每个天窗点都会对临时架空线路各构件工作状态进行检查,并对劣化的构件及时维修,因此,确定运营阶段轨道几何不平顺总限值为《普速铁路线路修理规则》[16]中小于等于80 km·h-1速度等级轨道静态几何不平顺的临时补修管理值,即轨距-8~+16 mm,水平17 mm,高低19 mm,轨向15 mm。
在运营阶段,计算架空装置变形时应采用运营列车活载,并应考虑钢轨、扣件和支座等对结构变形的影响。本文选用CRH380BL动车组,轴重17 t,基于2.1节的有限元模型,本文架空装置的临时架空线路轨道静态几何不平顺容许偏差管理值确定如下。
1)轨距
临时架空线路中轨距的变化主要由现场施工质量、施工中的振动冲击等引起,而不主要受列车活载或横向摇摆力的影响。考虑一定安全余量,由架空装置变形导致的轨距变化为±1.0 mm,则将轨距不平顺总限值-8~+16 mm 扣除该值后得轨距不平顺容许偏差管理值为-7.0~+15.0 mm。
2)水平
采用单根车轴(轴重17 t)以完全偏载的形式作用于钢垫梁跨中位置。根据计算结果,两纵梁竖向挠度差最大值为3.665 mm。考虑一定安全余量,将两纵梁竖向挠度差最大值取整为4.0 mm,则将水平不平顺总限值17.0 mm 扣除该值后的水平不平顺容许偏差管理值为13.0 mm。
3)高低
选用CRH380BL列车活载,轴重17 t,根据影响线按钢垫梁跨中竖向位移最不利位置加载。根据计算结果,钢垫梁跨中竖向挠度为2.5 mm,支座压缩量为0.5 mm。按较不利的情况取动力系数为2.0,则跨中竖向挠度为6.0 mm,将高低不平顺总限值19 mm 扣除此值后,得到高低不平顺容许偏差管理值为13.0 mm。
4)轨向
采用100 kN 的横向摇摆力施加于钢垫梁跨中位置。根据计算结果,钢垫梁跨中横向位移为0.27 mm,同时考虑现场施工情况,假设钢垫梁端部限位部分容许2 mm 横向缝隙,则钢垫梁跨中横向位移总量为2.27 mm。考虑一定安全余量,将钢垫梁跨中横向位移取整为3.0 mm,则将轨向不平顺总限值15 mm 扣除该值后,得到轨向不平顺容许偏差管理值为12.0 mm。
综上,采用本文设计的架空装置架设临时线路时,轨道静态几何不平顺容许偏差管理值见表3。其中,高低和轨向不平顺为10 m 弦测量的最大矢度值,测量时应从架空装置两端分别向外延伸5 m。

表3 限速80 km·h-1的临时架空线路轨道静态几何不平顺容许偏差管理值mm
4 结 论
(1)从轨道几何不平顺的角度提出满足列车80 km·h-1速度通行的梁式架空装置变形设计指标,该指标由设计阶段轨道几何不平顺总限值扣除轨道随机不平顺后得到,规定梁式架空装置水平、高低和轨向变形设计限值分别为5.0,6.0和5.5 mm。
(2)设计适用于高速铁路无砟轨道线路的临时架空装置,该架空装置具有较好的整体性和施工便捷性。经静力检算,架空装置跨中竖向位移最大值5.24 mm,两纵梁竖向位移差值3.38 mm,横向位移最大值0.27 mm,分别满足架空装置变形设计限值中对高低、水平和轨向不平顺的要求;经车-桥动力耦合分析,所设计的架空装置具有良好的动力性能,能够满足列车通行速度80 km·h-1的要求。
(3)针对所设计的临时架空装置,提出临时架空线路轨道静态几何不平顺容许偏差管理值,该管理值是由运营阶段轨道几何不平顺总限值扣除架空装置变形引起的轨道几何不平顺后得到,规定轨道静态几何不平顺容许偏差管理值为轨距-7.0~+15.0 mm、水平13.0 mm、高低13.0 mm、轨向12.0 mm。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
汽车实用技术(2021年4期)2021-03-05
数字通信世界(2020年2期)2020-03-04
模具制造(2019年3期)2019-06-06
汽车与安全(2017年4期)2017-12-07
投资北京(2017年1期)2017-02-13
汽车实用技术(2016年11期)2016-12-08
汽车实用技术(2016年6期)2016-07-26
专用车与零部件(2016年2期)2016-04-11
