
水重力式马铃薯静摩擦因数测定仪设计与试验
2022-04-07 13:56杨小平石林榕赵武云田剑锋
农业机械学报 2022年3期
杨小平 石林榕 臧 金 赵武云 田剑锋
(甘肃农业大学机电工程学院, 兰州 730070)
0 引言
在农业生产环节中,包括种子种植、收获、贮运等环节均涉及种子的摩擦,摩擦力会影响种子流通环节能耗和作业机性能发挥[1]。同时,摩擦力也是机构设计和选材的重要参考[2-3]。在马铃薯播种机种箱设计和取种勺优化中,若不考虑摩擦力的影响播种机易产生重播或漏播,造成不必要的经济损失[4-6]。其中,静摩擦力尤其重要。国内外学者对静摩擦因数进行了深入研究。SHAFAEI等[7]利用斜面法测定了麦粒的静摩擦因数和滚动摩擦因数,结果表明含水率和表面粗糙度对静摩擦因数和滚动摩擦因数均有影响。TAVAKOLI等[8]利用斜面法研究了不同含水率的大麦粒对各种表面(胶合板、玻璃和镀锌铁板)的静摩擦因数的影响,结果发现随着种子含水率的增加其静摩擦因数也随着增加。以上研究通过斜面法测定了种子静摩擦因数,然而未考虑斜面倾角对种子与斜面接触受力的影响。MOHSENIN[9]设计了一种测定使马铃薯脱皮摩擦力的装置,该仪器可用于测定种子的静摩擦因数、滑动摩擦因数。韩燕龙等[10]利用自制斜面仪测定了颗粒静摩擦因数,在此基础上建立了滚动摩擦因数与颗粒堆积角之间的预测模型。余参参等[11]建立了微型马铃薯种子的静摩擦因数、滚动摩擦因数与堆积角预测模型,预测的种子静、滚动摩擦因数条件下形成的堆积角与实际堆积角相对误差小于3%。王希英[12]利用自制的斜面法测定装置测定了马铃薯种间,种子与钢板、有机玻璃、聚氯乙烯之间的静摩擦因数,为马铃薯播种机的设计和优化提供了参考。冯斌[13]通过斜面法测定收获期马铃薯的静摩擦因数和动摩擦因数,为播种及收获机的研制提供了依据。蒙建国[14]通过斜面法测定了马铃薯种间、马铃薯与65Mn钢、马铃薯与上面覆盖土壤的65Mn钢的静摩擦因数,为摆动薯土分离筛设计提供依据。石林榕等[15]利用水平托重法原理,测定了马铃薯种子的静摩擦因数。由于测定仪器简易,增加了人为操作误差。同时,砝码的不连续质量对规律分析存在影响。
鉴于以上研究使用斜面法存在的问题,如过多的人为操作、过程繁琐等问题,本文在前期研究的基础上,以水为介质,通过精确控制水的质量来推算马铃薯与接触材料之间的静摩擦因数。为方便研制马铃薯生产环节的装备,本文利用自制的水重式马铃薯静摩擦因数测定仪测定甘肃主要马铃薯品种的静摩擦因数,并对是否带土的马铃薯静摩擦因数进行对比分析,最后,通过试验对比分析水重力法和斜面法测定的静摩擦因数在应用于马铃薯堆积角时的误差。
1 整体结构与工作原理
1.1 整体结构
马铃薯静摩擦因数测定仪主要由机架、信号控制装置、马铃薯高度调节装置、水流控制装置和牵引力测量装置等组成,如图1所示。其中,马铃薯高度调节装置主要由固定环、电机、螺杆、螺母套筒、接触板和挡片等组成。信号控制装置主要由光电传感器、信号线和控制板等组成。为及时检测马铃薯的移动,由光电传感器检测马铃薯在接触板上滑动信号。水流控制装置主要由水箱、水管、闸门和电磁阀等组成。牵引力测量装置由马铃薯、牵引线、小水筒和电子秤(最大量程为120 g,精度为1 mg)等组成。
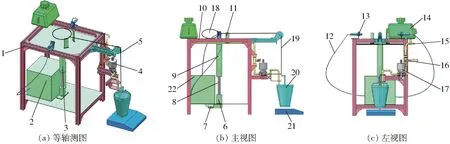
图1 马铃薯静摩擦因数测定仪结构图Fig.1 Structure diagrams of potato static friction coefficient tester1.机架 2.信号控制装置 3.马铃薯高度调节装置 4.水流控制装置 5.马铃薯牵引力测量装置 6.固定环 7.减速电机 8.螺杆 9.螺母套筒 10.接触板 11.挡片 12.信号线 13.光电传感器 14.水箱 15.水管 16.闸门 17.电磁阀 18.马铃薯 19.牵引线 20.小水筒 21.电子秤 22.控制板
1.2 工作原理
马铃薯与接触板之间、马铃薯之间的静摩擦因数测定原理如图2所示。
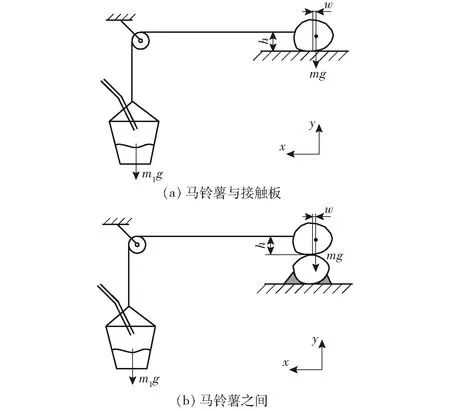
图2 马铃薯静摩擦因数测定原理图Fig.2 Measurement principles diagrams of potato static friction coefficient
测定马铃薯与其他材料之间的静摩擦因数时,将马铃薯置于接触板上,并用牵引线连接,牵引线绕过滑轮与水桶连接。当马铃薯和滑轮之间的牵引线不处于水平时,由高度调节装置调整马铃薯高度并借助水平尺的校量检测使牵引线处于水平。手动移动马铃薯,使其接近光电传感器光线。水箱加满水,水管出水口置于水桶上方,电子秤放置在水桶下。打开闸门,水在重力的作用下先后流经闸门、电磁阀缓慢流入水桶。当小水筒向下移动时,牵引线拉动马铃薯移动,其阻挡光电传感器的光电信号,而后信号控制装置将电磁阀关闭。一端完全堵住,在大气压力作用下水流停止向下继续流动。分别测量马铃薯重力mg、小水筒重力m1g及水平牵引线与接触板之间距离h。计算得到马铃薯与接触板之间的静摩擦力因数μ为
(1)
当测定马铃薯之间的静摩擦因数时,挑选长度和厚度较大马铃薯,平整地置于接触板上,并用螺钉固定,将被测马铃薯放置其上,测定方法同上。为避免被测马铃薯发生滚动,使其只产生滑动,被测马铃薯重心应置于马铃薯与接触材料的接触点后。马铃薯产生滑动的条件为
(2)
式中w——马铃薯在接触板上滑动的距离
2 关键部件设计
2.1 高度调节装置
由于马铃薯大小不一,其上安装的牵引线安装点不确定,会使牵引线不能保持水平。由此设计高度调节装置,主要采用螺杆螺母机构,具备自锁功能。螺杆为45°梯形,螺距为3 mm。螺母长度决定高度调整范围。参考马铃薯三轴尺寸,确定螺母长度为100 mm。其由12VDC蜗轮蜗杆减速电机驱动,控制电机的正反转实现接触板的升降,电机控制器为KGS-B20-L型。假设马铃薯质量为0.5 kg,接触板升降速度为0.001 m/s,为方便检测借助数显式水平仪调节牵引线呈水平。减速箱输出转速n定为20 r/min,将其代入公式可得电机扭矩
(3)
式中v——接触板升降速度
计算得T为2.3×10-3N·m,基于此选用12VDC的JGY-370型蜗轮蜗杆减速电机。
2.2 信号控制装置
当马铃薯被牵引线拖动后,其遮挡光电传感器信号,接收到光电传感器信号后,信号控制装置处理后将电磁阀关闭,隔断水流。信号控制装置主要由激光对射光电开关、继电器、电磁阀(常开)等组成。连线关系如图3所示:激光对射光电开关的发射极引出两根线,一根接电源正极,另一根接电源负极;激光接收极引3根线,1根接开关,2根接继电器端口,电磁阀端口B接继电器端口,电磁阀端口A接激光接收极及电源负极,开关另一端接电源正极。激光对射光电开关的响应速度影响到静摩擦因数测定准确性,选用响应时间短的ESF-20C1/20L型常开式激光对射光电开关,响应速度小于等于2.5 ms。为使指示线可见,开关选红色可见光型。
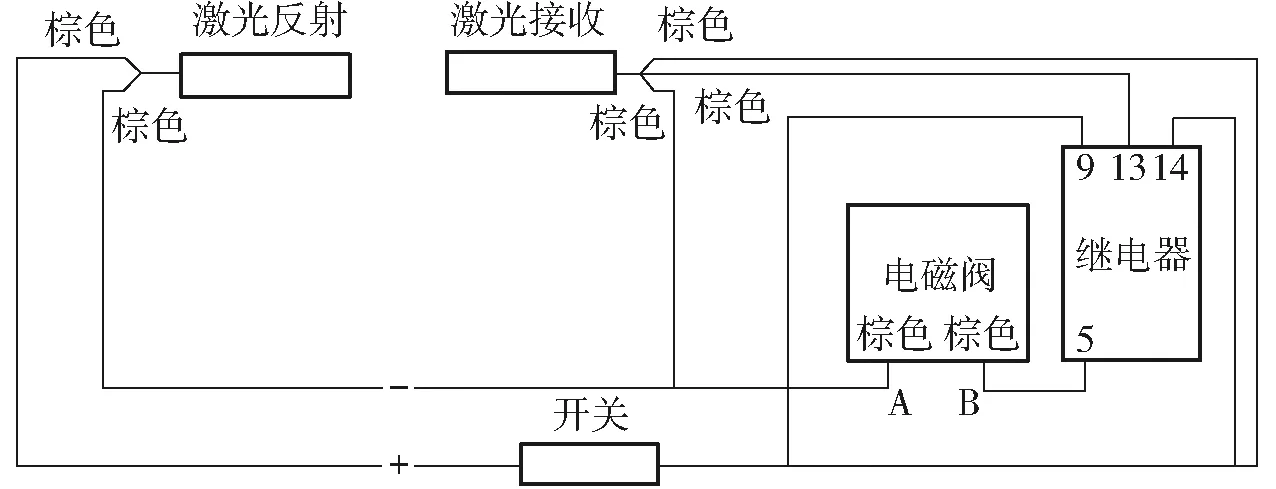
图3 控制装置接线原理图Fig.3 Schematic of control device wiring
2.2.1斜面法误差计算
常规的物料静摩擦因数测定主要通过斜面法,测定原理如图4所示。处于斜面上的马铃薯受重力mg、摩擦力f和支撑力N共同作用,受力分析公式为
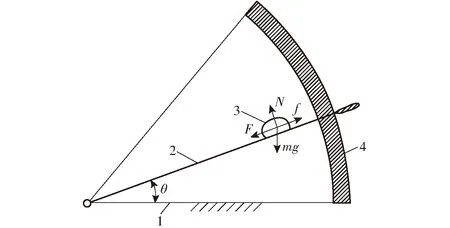
图4 斜面法原理图Fig.4 Principle of incline method1.水平板 2.斜面板 3.马铃薯 4.角度刻度盘
(4)
式中θ——斜面板与水平面的夹角
F——重力沿斜面板的分力,N
可得μ=tanθ。当斜面角度较小时,马铃薯相对静止,即f≥F;当夹角够大时,马铃薯开始沿斜面滑动,即F≥f。斜面夹角为0°~90°,期间sinθ是增函数,cosθ是减函数,当增大夹角时,F增加,f减小,当马铃薯开始滑动时,停止增加斜面板夹角。如以5(°)/s的角速度增加斜面夹角,人的正常反应时间为0.15~0.4 s,按0.15 s算,马铃薯开始下滑立即停止增大夹角,反应期间斜面已转0.75°,tan0.75°=0.013。
2.2.2重力法误差计算
水重式静摩擦因数测定时,水箱内液面为自由表面,水管管嘴为恒定自由水流,水流速计算如图5所示。流速计算式为
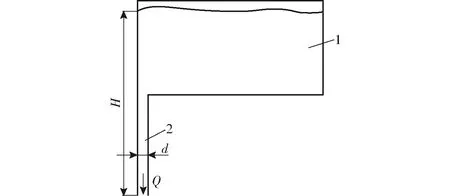
图5 水流速计算示意图Fig.5 Water flow diagram1.水箱 2.水管
(5)
式中Q——出口流速,m3/s
Cv——流速因数(已考虑水头损失),对于外伸圆柱管嘴Cv为0.82
g——重力加速度,m/s2
H——水管管嘴中心线到容器自由表面垂直距离,m
A——水管管嘴内孔截面面积,m2
如图5所示,管嘴出口与水箱内水面最大距离H为320 mm,水管管嘴内孔直径d为6.3 mm,可由式(5)得水管出口流速Q为6.39×10-5m3/s。试验测定从光电传感器发送信号到水管出水的时间大约需要0.05 s,人的反应时间按0.15 s算,从管子管嘴处流出水的体积为9.60×10-8m3,常温下水的密度为1.0×103kg/m3,增加误差时水的质量为9.6×10-2g,由式(1)计算结果可知,误差为0.001。从理论结果可知,水重式静摩擦因数测定方法的精度比传统法斜面法更高。
此外,为消除电路中存在的干扰,保障光电传感器能负载工作,选装JZX-22F两开两闭小型中间继电器。为更进一步减少误差,水管内孔径为3.15 mm,选用2W025-08K常开型电磁阀。
3 相关仿真参数测定
3.1 试验材料
随机选择收获后地窖储存4个月的无病虫害、无损、已成熟且成熟度接近的陇薯10号马铃薯380个[16],其含水率在49%~66%之间,平均质量密度为1 220 kg/m3,平均体积密度为513.486 4 kg/m3。由于薯皮有较好的隔绝效果,其内部的水分对摩擦特性影响较小。为便于建立薯种的离散元仿真模型[17-18],使用数显式游标卡尺(精度0.02 mm,量程100 mm)对其三轴尺寸(长、宽、高)进行测量。由测定结果可知,其长度为79.46~103.62 mm,宽度为63.15~90.70 mm,高度为55.37~71.21 mm。整体来说,陇薯10号马铃薯长度的集中分布范围大于宽度,宽度集中分布范围大于高度。并将马铃薯形状按球形、椭球形和不规则进行分类,其数量比为47∶45∶8。由于马铃薯表皮难免会带有土,对其摩擦特性产生显著影响。试验材料选择自然状态下带土和干净种子各30个。清洗30个带土马铃薯得到的土量约为0.3 g。具体操作过程为:清洗前先称取干净水桶质量,清洗时将30个马铃薯全部放入水桶清洗,为防止灰尘掉入水桶,在其上10 mm位置放置一块木板,将其放置在空气流通较好的地方,待水分蒸发后板结成土块,再称取土和桶的质量。为比较重力法和传统斜面法测定静摩擦因数的精度,重力法采用马铃薯静摩擦因数测定仪,斜面法选择45号钢板和硬质塑料板(长300 mm,宽200 mm,厚2 mm),测定过程如图6所示。

图6 马铃薯静摩擦因数测定过程Fig.6 Schematics of potato static friction coefficient measurement
3.2 测量结果
3.2.1重力法
带土、不带土马铃薯与钢板、塑料板、马铃薯之间的静摩擦因数测量结果如图7所示。
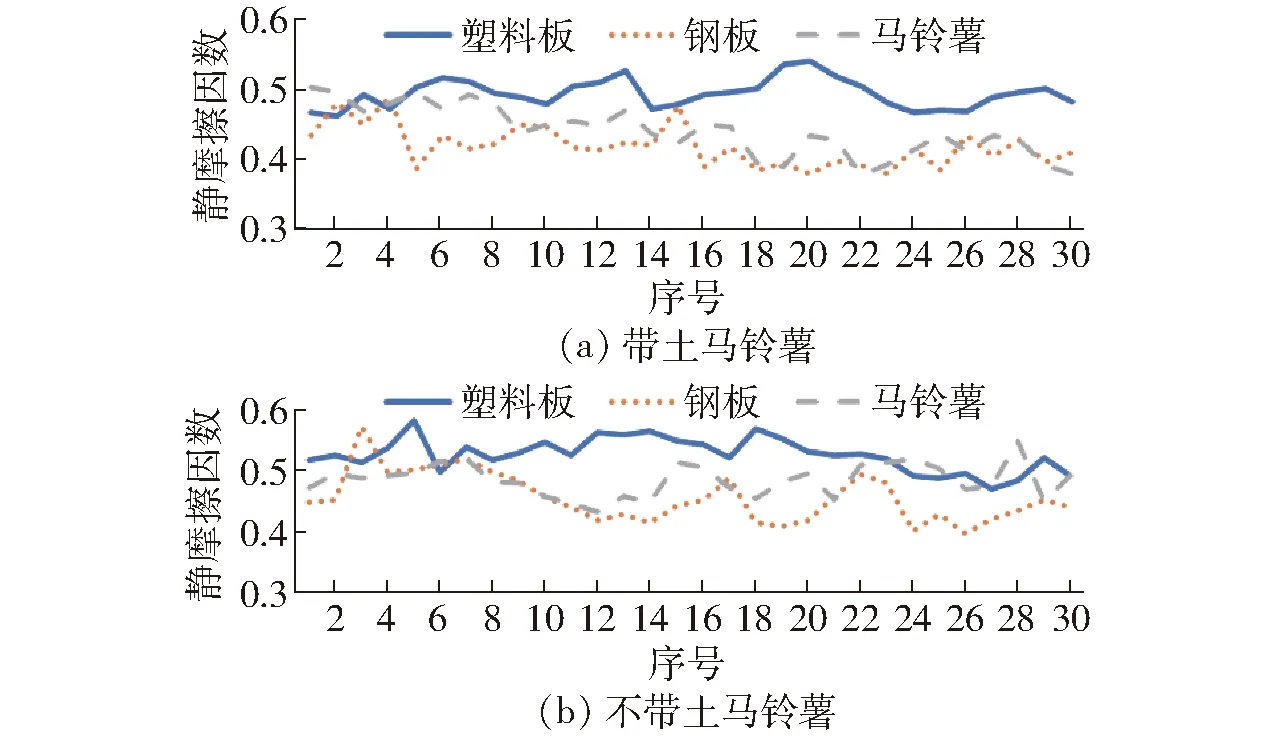
图7 马铃薯静摩擦因数重力法测定结果Fig.7 Results of gravimetric determination of static friction coefficient of potatoes
由图7可知,带土陇薯10号之间的静摩擦因数分布在0.379~0.505,平均值为0.442;带土陇薯10号与45号钢板之间的静摩擦因数分布于0.395~0.518,平均值为0.455;带土陇薯10号与塑料板之间的静摩擦因数分布在0.469~0.581,平均值为0.526;不带土陇薯10号之间的静摩擦因数分布在0.431~0.548,平均值为0.483;陇薯10号与45号钢板之间的静摩擦因数分布在0.381~0.49,平均值为0.420;陇薯10号与塑料板之间的静摩擦因数分布在0.463~0.538,平均值为0.496。为分析不同材料、带土与否对马铃薯静摩擦因数的影响规律,对比静摩擦因数平均值,结果发现带土马铃薯的静摩擦因数比不带土马铃薯小,带土、不带土马铃薯与塑料板之间的静摩擦因数大于马铃薯之间,马铃薯之间的静摩擦因数大于其与45号钢板之间。
3.2.2斜面法
通过斜面法测定了马铃薯与钢板、塑料板之间的静摩擦因数,而马铃薯之间的静摩擦因数测定存在困难。马铃薯静摩擦因数测定结果如图8所示。
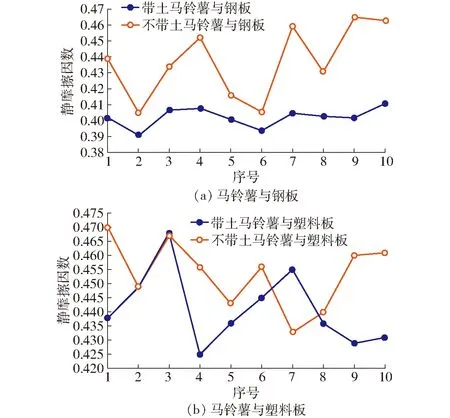
图8 马铃薯静摩擦因数斜面法测定结果Fig.8 Results of potato static friction coefficient determined by inclined plane method
由图8可知,带土、不带土马铃薯与钢板之间的静摩擦因数平均值分别为0.402、0.437,与塑料板之间的静摩擦因数平均值分别为0.441、0.453。对比重力法和斜面法测定的马铃薯静摩擦因数结果发现,斜面法结果大于重力法。究其原因,由于不规则形状种子的重心位置相对复杂,斜面法测定过程中人为放置将马铃薯重心置前,种子更易滑落,加之,试验时操作人员反应存在差异,造成斜面法结果普遍小于重力法。
4 试验验证
堆积角是表征散体物料流动、摩擦等特性的宏观指标,与接触材料、物料物理特性有关[19-20]。具体指物料从一定高度自然连续下落堆积平面,堆积成的斜面母线与底平面夹角。在测定堆积角时往往采用倒塌法和堆积法。本文采用更易测量的倒塌法形成堆积角,堆积容器为长方体,借助离散单元法进行马铃薯堆积角的验证。
4.1 仿真模型及相关参数
马铃薯外形差异明显。挑选与圆形、椭圆形、不规则(除圆形和椭圆形以外)统计平均值接近的种子,借助SolidWorks软件对其进行三维建模,并将模型导入EDEM 2017软件中。为建立外形接近马铃薯的离散元模型,采用球颗粒聚合法建立球形、椭圆形和不规则3种离散元模型[21-22],如图9所示。

图9 马铃薯离散元模型Fig.9 Discrete element models of seed potatoes
马铃薯堆积过程中,除种子之间的接触外,还与其他材料接触,堆积容器材料采用45号钢。种子之间、种子与45号钢之间的接触模型均采用默认的Hertz-Mindlin无滑动接触力学模型。马铃薯颗粒生成数量按384粒,球形、椭球形和不规则生成数量比为47∶45∶8。堆积容器为长方体,其长、宽、高为310 mm×90 mm×700 mm。形成堆积角时以较缓慢的垂直速度向上提升容器侧板,提升速度约为20 mm/s。种子坍塌后通过软件自带的角度尺测量形成的堆积角。马铃薯坍塌堆积仿真模型如图10所示。其他设置包括:颗粒体积分布为0.9~1.1倍,瑞利时间步长为8%,网格尺寸为2倍最小单元尺寸。斜面法测定马铃薯种子之间的静摩擦因数存在困难,仿真试验时采用重力法测定结果。坍塌堆积仿真所需参数如表1所示[23]。
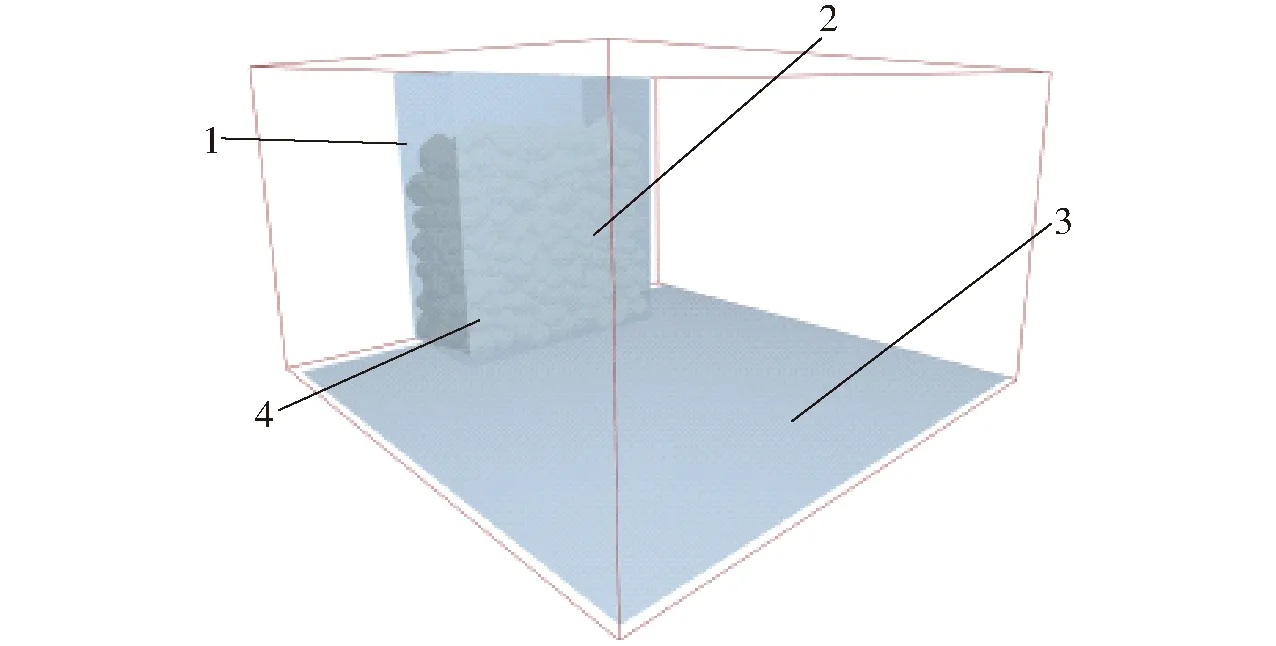
图10 马铃薯坍塌堆积仿真模型Fig.10 Potato collapse pile-up simulation model1.容器 2.马铃薯 3.底板 4.侧板
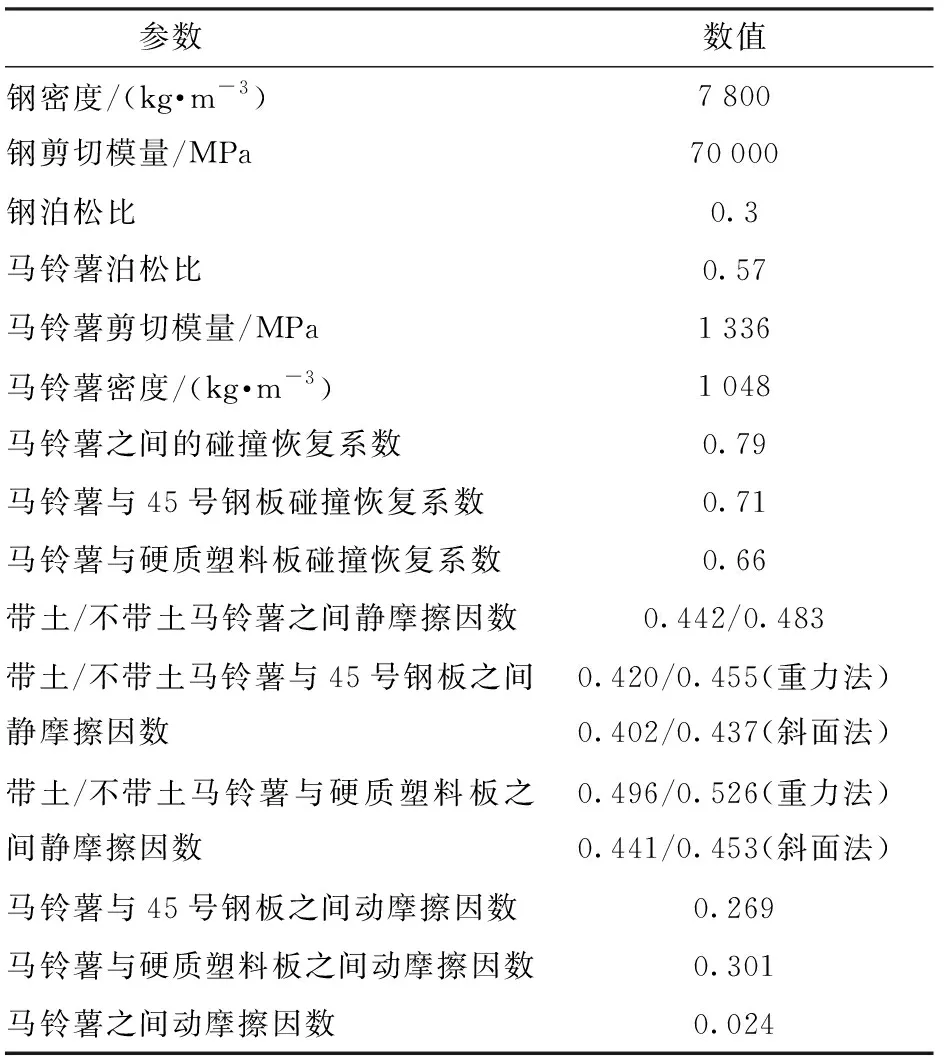
表1 基本仿真参数Tab.1 Basic simulation parameters
4.2 坍塌过程
通过EDEM仿真可以观察到马铃薯在坍塌过程中完整的细节。当容器内的种子处于一定高度,容器单侧撤离后,种子的重力势能开始向其动能转化,动能一面以速度的形式展现,另一方面以转动角速度的形式体现,直至马铃薯角速度和速度接近零时坍塌休止角形成,此过程大约需3 s,如图11所示。
由图11a可知,种子在向右下滑动过程中,速度先变大后减小,最大值约发生在2 s时刻,由速度云图分析,速度变化延续的时间较长,外侧种子运动速度较大;由图11b发现,种子角速度也是先变大后减小,最大值约发生在0.5 s时刻,角速度相较于速度提前减小。
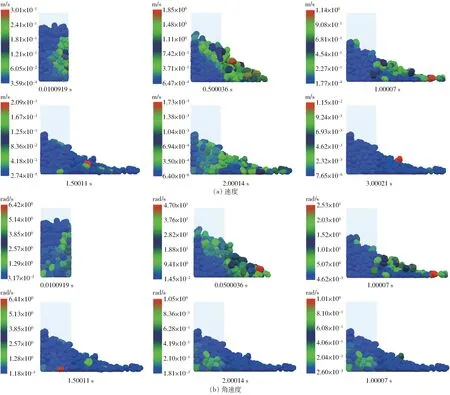
图11 坍塌堆积过程中种子速度、角速度变化仿真结果Fig.11 Simulation results of seed velocity and angular velocity variation during collapse pile-up
4.3 结果与分析
在EDEM软件中,在其他参数相同的条件下,改变本文使用的重力法、传统斜面法得到的静摩擦因数后对坍塌堆积后形成的堆积角进行比较,分别对比带土和不带土马铃薯的堆积角,如图12所示。
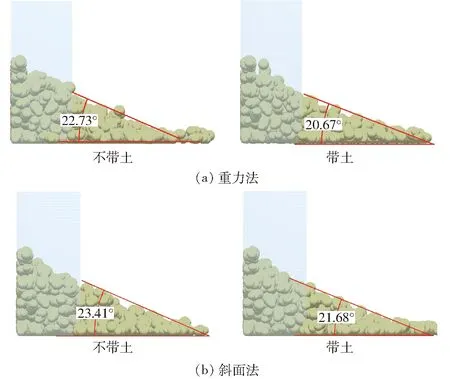
图12 马铃薯两种仿真条件下堆积角对比Fig.12 Comparison of repose angles of potatoes under two simulation conditions
由图12可知,重力法得到的带土种子静摩擦因数条件下形成的仿真堆积角为20.67°,不带土条件下形成的堆积角为22.73°,带土马铃薯的静摩擦因数较不带土小,其对应的堆积角较小。斜面法得到的带土种子静摩擦因数条件下形成的仿真堆积角为21.68°,不带土条件下形成的堆积角为23.41°。因此,本文使用的重力法条件下形成的堆积角比斜面法小。为了分析比较两种测静摩擦因数方法,进行了有土、无土条件下马铃薯坍塌堆积试验。
4.4 试验验证
通过长方形容器对带土和不带土马铃薯进行堆积角试验,容器长、宽、高为310 mm×90 mm×700 mm,材料为45号钢,试验时容器侧板提升速度约为20 mm/s。容器内马铃薯384个,球形、椭球形和不规则数量比为47∶45∶8。先进行自然状态带土马铃薯堆积试验,共进行5次;再将马铃薯洗净,清洗马铃薯后的泥水经过干燥后称取质量约为4.13 g,待马铃薯表皮水分晾干后进行不带土堆积试验。带土和不带土条件下形成的马铃薯堆积角如图13所示。马铃薯实际与仿真堆积角对比如表2所示。
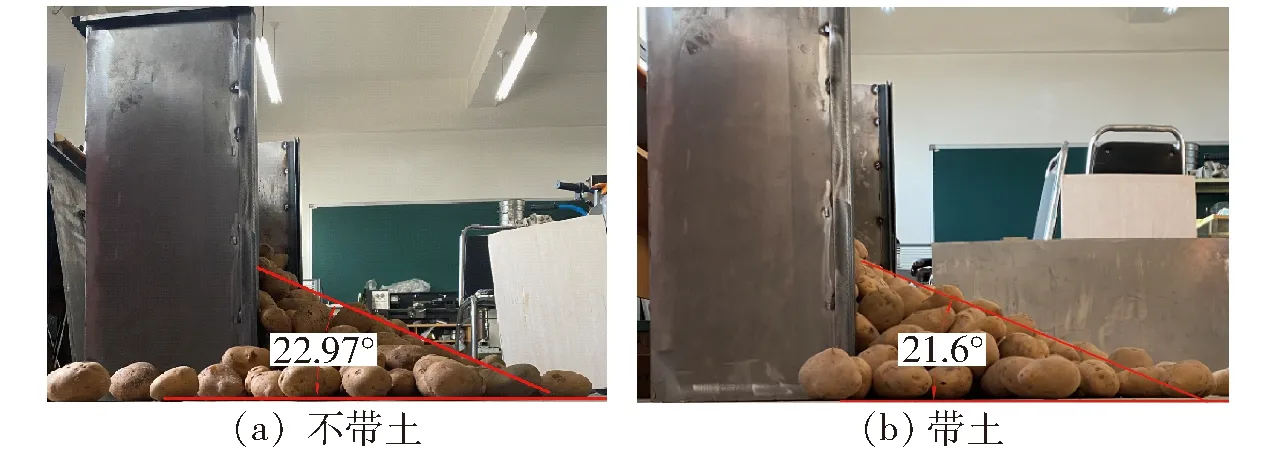
图13 马铃薯堆积角Fig.13 Potato repose angle
由表2可知:重力法条件下不带土马铃薯形成的堆积角与试验结果较接近,其相对误差为1.04%;斜面法条件下不带土马铃薯形成的堆积角与试验结果相对误差为7.73%;斜面法条件下带土马铃薯形成的堆积角与试验结果较接近,其相对误差为0.37%,重力法条件下的堆积角与试验结果的相对误差为4.31%。综合分析发现,重力法测定马铃薯静摩擦因数优于斜面法。本文使用的重力法为测定物料静摩擦因数提供了一种新的方法,可解决斜面法测定物料之间静摩擦因数存在困难的问题。
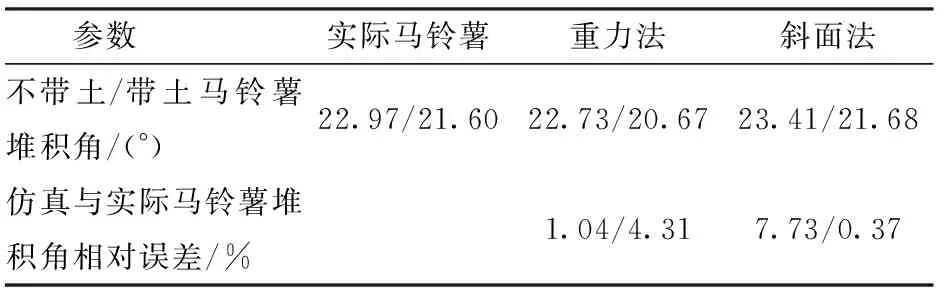
表2 马铃薯实际与仿真堆积角对比Tab.2 Comparison of actual and simulated repose angles of potatoes
5 结论
(1)针对传统斜面法测定马铃薯静摩擦因数存在工作效率、精度较低等问题,研究基于重力法的马铃薯静摩擦因数测定仪。通过理论计算比较了斜面法和重力法测量精度,并对甘肃省种植品种陇薯10号进行了静摩擦因数测定。
(2)由测定结果发现:带土陇薯10号与钢板、塑料板以及带土陇薯10号之间的静摩擦因数分别为0.420、0.496、0.442,不带土陇薯10号与钢板、硬质塑料板以及不带土陇薯10号之间的静摩擦因数分别为0.455、0.526、0.483。由此可见,带土马铃薯的静摩擦因数普遍比不带土马铃薯小;无论马铃薯是否带土,其与塑料板之间的静摩擦因数大于马铃薯之间,马铃薯之间的静摩擦因数大于其与45号钢板之间。
(3)为进一步验证重力法测定马铃薯静摩擦因数的可靠性,对陇薯10号进行马铃薯堆积角仿真和试验对比。结果发现:重力法条件下不带土马铃薯形成的堆积角与试验结果较接近,其相对误差为1.04%,斜面法条件下不带土马铃薯形成的堆积角与试验结果相对误差为7.73%;斜面法条件下带土马铃薯形成的堆积角与试验结果较接近,其相对误差为0.37%,重力法条件下的堆积角与试验结果的相对误差为4.31%。综合比较重力法在测定马铃薯静摩擦因数方面优于斜面法。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
中国药学药品知识仓库(2022年8期)2022-05-09
动漫界·幼教365(中班)(2021年7期)2021-07-19
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
学生导报·东方少年(2019年16期)2019-07-02
发明与创新·中学生(2018年7期)2018-09-17
分析化学(2018年7期)2018-09-17
发明与创新·中学生(2018年2期)2018-02-07
智富时代(2018年12期)2018-01-12
智富时代(2018年12期)2018-01-12
