
基于离散元法的砖红壤斜柄折翼式深松铲设计与试验
2022-04-07 13:55张喜瑞曾望强刘俊孝董学虎胡宏男
农业机械学报 2022年3期
张喜瑞 曾望强 刘俊孝 吴 鹏 董学虎 胡宏男
(1.海南大学机电工程学院, 海口 570228; 2.曼尼托巴大学生物系统工程系, 温尼伯 R3T 2N2;3.海南省农业机械鉴定推广站, 海口 570206; 4.仲恺农业工程学院机电工程学院, 广州 510225)
0 引言
目前,香蕉种植多采用“两年一种”模式,短周期的香蕉种植模式结合传统的香蕉地翻耕、旋耕模式使得农业机具的作业次数大幅增加[1-2],导致香蕉田土壤耕作层不断压实并形成犁底层,进而造成表层土壤孔隙度下降,雨水难以快速渗入土壤,形成的表面径流带走了大量的表层土壤和有机质,严重影响香蕉树的生长以及香蕉的产量和品质[3-4]。香蕉地土壤多为砖红壤土,该类型土壤矿物含量高、质地黏重,叠加热带农业区雨水充足,导致土壤含水率大。运用传统机具对砖红壤土进行深松作业时,存在耕作阻力大、地表平整度差及动土量大等问题。同时,由于香蕉种植的区域性特点,缺乏香蕉地专用的深松机具,严重制约了深松技术在热带农业区的推广应用。
欧美等国家对深松铲的研究相对完善,SHAHGOLI等[5-6]以单立柱凿式深松铲为试验对象,分别对振频、振动角进行单因素试验,得到最优作业频率和最优振动角。MACHADO等[7]通过田间试验评估了不同的地区和不同作业深度下深松作业的能量消耗。王俊发等[8]采用二次回归通用旋转设计,考察了深松铲振频、振幅、前进速度与耕阻、振动的关系。刘俊安等[9]通过离散元分别对3种深松铲进行了研究,发现凿形铲、箭形铲和翼形铲作业对土壤扰动面积依次增大。岳斌等[10]通过对分层深松铲前后铲距对土壤扰动行为进行了研究,发现离散元软件能够较为准确地模拟分层深松土壤的扰动过程。
目前,热带农业区的深松研究主要集中在甘蔗、香蕉等作物。韦丽娇等[11-12]研制了1SG-230型甘蔗地深松旋耕联合作业机,通过在常规旋耕机前增加一组深松装置,能够同时完成深松和旋耕作业;严晓丽等[13]设计的热带农业区使用的凿式深松铲,可有效减少深松阻力;李柏林等[14]对甘蔗地凿式深松犁的角度参数进行了优化设计,重点分析了深松铲的部分参数对耕作阻力的影响。然而,由于砖红壤土的特殊物理特性[15],针对其他土壤条件设计的深松机具适用性较差,可适应香蕉地工况的高性能深松整地装备较少,作业阻力仍有待降低。此外,由于香蕉根系分布范围较大,相较于典型粮食作物需要更大的松土面积。
本文针对海南香蕉地砖红壤土特性,以降低作业阻力、增大松土面积和减少土壤扰动为目标,设计一种香蕉地斜柄折翼式深松铲。同时结合离散元仿真和田间试验研究[16],分析深松铲在强黏性土壤作业过程中的受力状态,探索深松铲深松效果和耕作阻力之间的关联机制,以期为热带地区深松耕作技术研究提供理论依据和技术支撑。
1 关键部件设计
1.1 斜柄折翼式深松铲结构设计
由于深松作业时,铲柄直接与土壤接触,并挤压前方土壤使其从两侧滑出,因此铲柄部分是前进阻力的重要来源,将铲柄形式设计为倾斜式,可以将向后阻碍机具前进的力转化为土壤向上运动的力,使深松铲能更好地掀动土壤并减少前进阻力和改善深松铲容易产生的断裂、损坏等现象[17]。为提高犁耕比、增加土壤的扰动面积、改善深松铲的土壤扰动系数和调节深松后土壤的减蒸保墒能力,通过在深松铲底部增加两个对称的铲翼,并将铲翼向后弯折至地表平行以减少土壤阻力。斜柄折翼式深松铲结构及几何参数如图1所示。

图1 斜柄折翼式深松铲结构及几何参数示意图Fig.1 Schematic diagram structure and geometric parameters of inclined handle folding wing subsoiling shovel1.安装孔 2.铲柄 3.铲刃 4.铲翼 5.入土铲尖
斜柄折翼式深松铲整体结构由安装孔、铲柄、铲刃、铲翼和入土铲尖组成。斜柄折翼式深松铲结构参数参照文献[18]设计,相关研究表明,深松铲尖前伸长度S与理论深松深度H的比值S/H在0.64~1.04范围时具有较明显的减阻效果,当S/H=0.8时减阻效果为最佳状态[19],即设计深松铲尖前伸长度S为400 mm。为解决深松时香蕉根茬对作业效果的影响,斜柄折翼式深松铲设计有深松铲翼以增加松土面积,并保证刃口具有较好的滑切性能,铲翼倾角γ取25°。其他结构参数如表1所示。

表1 斜柄折翼式深松铲结构参数Tab.1 Structural parameters of inclined handle folding wing subsoiling shovel
铲柄和铲翼材料均采用65Mn钢,刃口及铲尖进行热处理,增强耐磨性,深松铲整体进行耐腐蚀处理。
1.2 斜柄折翼式深松铲受力分析
斜柄折翼式深松铲在深松作业时,主要受到铲柄部分和铲尖部分的作用力[20]。
1.2.1斜柄折翼式深松铲铲柄部分受力分析
对斜柄折翼式深松铲铲柄部分进行受力分析时,通过简化受力模型,假设深松铲铲柄所受合力为F0,则合力可分解为工作面上若干个分力,受力示意图如图2所示,分力和合力关系为

图2 斜柄折翼式深松铲铲柄受力分析Fig.2 Stress analysis on handle of inclined handle folding wing subsoiling shovel
F0=2(N1sin(α/2)+N1μcos(α/2)+N2μ)
(1)
式中N1——铲刃上的法向力,N
N2——铲柄侧面法向力,N
μ——静摩擦因数α——铲刃夹角
根据已有研究结果[21]可知,N1、N2主要受到土壤比阻和比压的影响,因此
(2)
式中K1——变形比阻,Pa
A1——铲柄刃口面积,m2
K2——土壤比压,Pa
A2——铲柄侧面面积,m2
由于深松铲为对称结构,两侧受力可以抵消,将式(2)代入式(1)中可得出前后方向的总阻力F0为
F0=2K1A1(sin(α/2)+μcos(α/2))+2K2A2μ
(3)
由式(3)可知,总阻力F0与变形比阻K1、土壤比压K2、铲刃夹角α相关,由于砖红壤土质地黏重,密度较高,导致变形比阻K1、土壤比压K2相较于其他类型土壤大,使得作业阻力上升,因此通过设计降低铲刃夹角α以进行减阻,但是夹角过小会导致深松铲强度及松土面积降低,因此通过试验得出最佳铲柄刃口夹角为48°。
1.2.2斜柄折翼式深松铲铲尖部分受力分析
斜柄折翼式深松铲铲尖在作业过程中,主要受到深松铲水平方向的牵引力,以及土壤对铲尖部分的压力,受力情况如图3所示。

图3 斜柄折翼式深松铲铲尖受力分析Fig.3 Stress analysis of blade tip of inclined handle folding wing subsoiling shovel
通过受力分析,铲尖水平方向的受力平衡方程为
F1=N0sinδ+μN0cosδ+kW
(4)
式中F1——铲尖所受水平牵引力,N
N0——法向方向受到的正压力,N
k——单位宽度上土壤的纯切削阻力,N/mm
W——铲刀面宽度,mm
δ——深松铲尖倾角
土壤的纯切削阻力很小,可忽略不计,则式(4)可改写成
F1=N0sinδ+μN0cosδ
(5)
由式(5)可知,δ对深松铲所受阻力有显著影响,主要影响深松铲的入土性能和前进阻力,随着入土角的增大,入土能力越差,且阻力增加;入土角减小,疏松土壤效果较差。根据砖红壤土的物理特性,并结合农业机械设计手册深松铲入土角的设计,确定深松铲尖倾角δ为25°。
2 离散元三层深松土壤模型建立
2.1 砖红壤土特性
砖红壤土是我国热带地区雨林、季雨林中,生物物质转化迅速,铁铝氧化物高度富集的一类红色土壤[22]。于海南省儋州市典型砖红壤香蕉地取样,使用土壤团粒结构分析仪测量得土壤颗粒组成如表2所示。
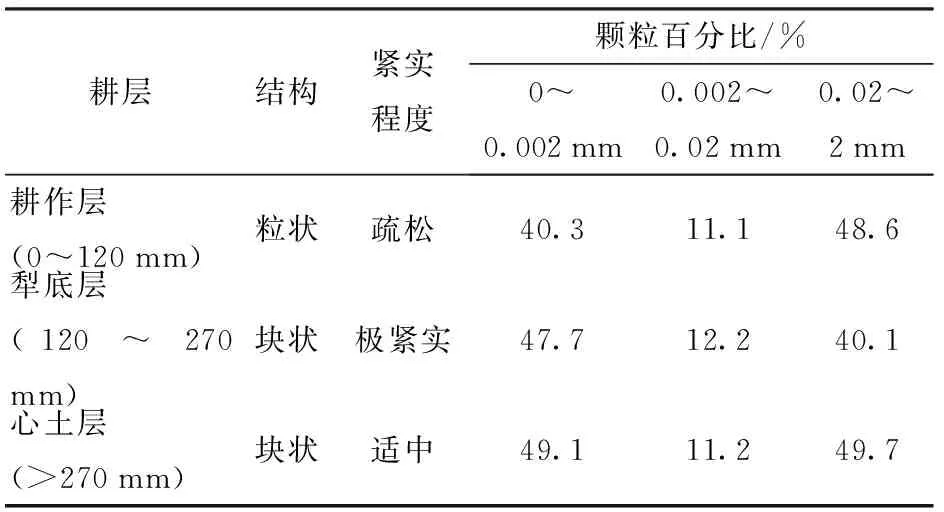
表2 砖红壤土颗粒组成Tab.2 Composition of lateritic soil particle
由表2可知,砖红壤土表层疏松,底层紧实,深松作业可有效改善土壤环境。根据测量结果,利用离散元软件EDEM 2.6建立耕作层、犁底层、心土层3层深松土壤模型,并对深松铲进行虚拟仿真。为准确反映深松铲的作业性能,还需进一步确定土壤-深松铲离散元仿真参数[23]。
2.2 离散元土壤接触模型参数确定
接触模型是离散元法的重要基础,其实质是准静态下颗粒固体接触力学弹塑性的分析结果[24-25]。仿真对象为砖红壤土,具有散粒体物料特性,土壤有一定粘附性,而Hertz-Mindlin with JKR接触模型是一种建立在Hertz理论上的粘结性颗粒接触模型,且接触模型中的法向弹性力可较好地表征颗粒间的粘弹性特征[26],因此选用土壤与深松铲间接触模型为Hertz-Mindlin with JKR。通过实验室前期测量标定试验及文献[27-28]可知,砖红壤土的仿真本征参数如表3所示。

表3 离散元模型基本参数Tab.3 Basic parameters of discrete element model
2.3 虚拟土槽仿真模型建立
运用EDEM自带颗粒单元建立球形结构,设置土壤颗粒半径为8 mm,并将SolidWorks软件建立的斜柄折翼式深松铲三维结构模型导入EDEM软件。在所设定的仿真模型中生成土壤颗粒,固定时间步长为2.26×10-4s,Rayleigh时间步长为1.13×10-3s[29]。为分析深松铲对不同深度土层土壤的运动及扰动差异,设置为耕作层、犁底层、心土层3层土壤模型,为适应砖红壤土地区各土层实际情况,确定耕作层厚度为120 mm,犁底层厚度为150 mm,心土层厚度为230 mm。如图4所示,为保证仿真准确性,耕作层土壤颗粒采用随机排列,结构密实的犁底层土壤颗粒采用面心立方排列(孔隙率28.1%),深层的心土层土壤颗粒采用体心立方排列(孔隙率33.8%)。

图4 仿真几何模型Fig.4 Simulation geometry model
3 离散元仿真
3.1 深松铲工作仿真分析
为探究斜柄折翼式深松铲的合理作业速度,分析深松铲在不同作业速度下的作业效果。深松仿真时间为3.0~8.0 s,深松深度为350 mm,选取作业速度1.80 km/h (3.0~4.0 s)、2.52 km/h (4.0~5.0 s)、3.24 km/h(5.0~6.0 s)、3.96 km/h (6.0~7.0 s)、4.68 km/h (7.0~8.0 s)。通过分析深松铲对土壤颗粒混合情况、土层扰动效果和耕作阻力,以选取最佳作业速度。
由图5a可知,深松铲对土壤土层间的颗粒混合量随作业速度的增加而逐渐增多。当作业速度为1.80 km/h时,各层土壤颗粒间无明显混合;在深松铲作业速度为2.52 km/h时,耕作层与犁底层之间的土壤颗粒开始出现混合现象;在深松铲作业速度为3.24 km/h时,土壤颗粒混合现象大量出现;深松铲作业速度为3.96~4.68 km/h时,各土层出现的颗粒混合量基本不变。

图5 不同速度下深松效果仿真结果Fig.5 Simuation results of subsoiling effect at different speeds
由图5a可知,当深松铲作业速度达3.24 km/h之后,不同土层的土壤颗粒混合量迅速增加,这是因为土壤在高速撞击下形成更多的松散颗粒,并通过深松铲快速掠过后形成的沟壑进入其他土层。当深松铲速度在3.24~3.96 km/h之间时,深松铲在保证工作效率的前提下,土壤混合量达到最佳效果。
由图5b可知,深松铲对土层扰动程度随作业速度的增加而逐渐增大。深松铲两侧的土壤在铲尖、铲翼、铲柄、铲刃剪切和挤压作用下,沿深松铲前进方向向两侧抬升,扩大了土层的扰动范围。当作业速度为1.80 km/h时,深松铲对土层无明显扰动现象;作业速度为2.52 km/h时,土层出现明显扰动;当作业速度大于3.24 km/h,深松铲对犁底层和耕作层的扰动逐渐增强,并逐渐达到稳定状态。这主要是由于土层自身具有一定稳定性,当作业速度达到一定值时,深松铲对土层的冲击力影响土层的稳定性,造成深松铲作业面积内的土层破坏。因此,当犁底层完全被打破后,作业速度的增加不再造成土层上移现象。即深松铲速度大于3.24 km/h时,土壤犁底层被完全打破,在深松效率较高的前提下,对土层扰动较少。
基于不同作业速度进行仿真分析,探究深松铲在相同深松深度下的耕作阻力。由图6可知,在作业速度为1.80 km/h时,其耕作阻力均值为1 901.1 N;在作业速度为2.52 km/h时,其耕作阻力均值为2 186.7 N;在作业速度为3.24 km/h时,其耕作阻力均值为2 331.2 N;在作业速度为3.96 km/h时,其耕作阻力均值为2 512.1 N;在作业速度为4.68 km/h时,其耕作阻力均值为2 645.7 N。仿真结果表明,随作业速度的增加,耕作阻力也随之增加,这主要是因为作业速度越大,土壤对铲柄和铲尖的压力就越大,从而造成了耕作阻力的变化。

图6 耕作阻力对比Fig.6 Comparison of tillage resistance
由图5、6可知,作业速度的变化会导致深松效果的差异。在保证较高工作效率的前提下,作业速度在3.24~3.96 km/h之间,不同土层间的土壤颗粒混合量较小,土层扰动效果明显,深松铲耕作阻力为深松铲最佳作业速度区间。同时,通过仿真分析可知,作业速度越大,耕作阻力越大。
3.2 深松铲对比仿真
3.2.1耕作阻力对比
深松铲工作目的主要为打破犁底层的板结土块,结合实际工作情况,模拟深松铲的工作过程。通过第3.1节可知深松铲最佳作业速度范围为3.24~3.96 km/h,故选择该范围内的中间值3.6 km/h进行对比仿真,在作业深度为350 mm时,斜柄折翼式深松铲和直柄凿式深松铲耕作阻力分别为2 450.9、2 847.2 N。综上分析,相对于直柄凿式深松铲,斜柄折翼式深松铲的耕作阻力可降低16.2%,具有明显的减阻效果。
3.2.2深松效果对比
深松铲的松土效果可表现为松土面积、土层扰动量、地表平整度和沟槽宽度。深松铲在工作过程中,应在达到最大松土面积的前提下,降低深松铲对耕作层、犁底层、心土层土壤的混合量,达到不乱土层的效果,减少养分含量较低的心土层土壤的上移量。同时,沟槽宽度和地表平整度越小,更利于土壤保水保墒。
(1)松土面积
斜柄折翼式深松铲工作时,铲尖切割土壤,将土壤向前方与上方挤压。随着深松铲的前进,倾斜的铲柄不断抬升土壤,土壤承受拉伸应力而被破坏。因此,与直柄凿式深松铲相比,斜柄折翼式深松铲不仅铲尖对土壤有挤压和碎土作用,而且倾斜的铲柄抬升土壤时对土壤有拉伸作用,促进了土壤的破碎,进而扩大了上层土壤的松土面积[30]。此外,深松铲两侧的折翼并不直接作用于坚硬的犁底层,而是作用于相对紧实的心土层,可以降低作业阻力,而通过搅动心土层,可以对犁底层进行纵向的挤压作用,配合深松铲的横向挤压,可有效地打破犁底层并增加深松装置深层的松土面积。为进一步分析2种深松铲的松土面积,通过虚拟仿真分析,可以根据观察深松铲在作业过程中土壤颗粒的受力情况,仿形绘制土壤的扰动轮廓,记录关键点的坐标数据,并输入Excel中,即可得到两种深松铲作业时的松土效果图,如图7所示松土面积A可表示为

图7 深松铲松土效果对比Fig.7 Comparison of effect of subsoiling and loosening soil
(6)
式中f(x)——左侧曲线近似函数
g(x)——右侧曲线近似函数
a、b——f(x)函数的起点和终点的参数
c、d——g(x)函数的起点和终点的参数
L——深松铲宽度,mm
由图7可知,在相同作业深度条件下,直柄凿式深松铲最大松土宽度W1小于斜柄折翼式深松铲松土宽度W2,通过计算可以得知斜柄折翼式深松铲的松土面积大于直柄凿式深松铲的松土面积,从而表明斜柄折翼式深松铲的松土量更大,更有利于砖红壤地区土壤深松。
(2)土壤扰动效果
土壤扰动效果是评价深松作业的重要指标[31]。图8a为两种深松铲作业时土壤颗粒的受力情况,其中红色颗粒代表土壤颗粒受力较大,蓝色颗粒代表受力较小,绿色颗粒表明受力大小介于两者之间。由图可知,相比直柄凿式深松铲,斜柄折翼式深松铲对各土壤层的土壤颗粒冲击较小,对土层破坏小。斜柄折翼式深松铲对耕作层和心土层土壤颗粒的冲击大于犁底层(图8a中土壤中部的犁底层颗粒红色部分较少),即说明斜柄折翼式深松铲对犁底层土壤起到了滑切作用,既可促进土壤中的雨水下渗,又可降低深松铲对土层破坏。同时,由图8b可知,斜柄折翼式深松铲相对于直柄凿式深松铲,能有效降低对各土壤层的土壤混合量,达到不乱土层的效果,减少了养分含量较低的心土层上移,从而起到较好的深松效果。

图8 两种深松铲仿真效果Fig.8 Simulation results of two kinds of subsoiling shovel1.斜柄折翼式深松铲 2.直柄凿式深松铲 3.耕作层 4.犁底层 5.心土层
(3)地表平整度和沟槽宽度
为测定深松铲对地表平整度与沟槽宽度的影响,利用离散元软件中的Clipping模块对仿真土槽进行区域划分。提取该区域稳定后的坐标值,进行土壤轮廓标定,绘制出深松前后的地表线,并在深松后的地表线上过最高点作水平线为基准线。如图9所示,在整个深松铲深松宽度LY以d0(30 mm)等分标记测点,在两种深松铲作业前后测定土壤轮廓曲线至水平基准线的垂直距离[32-33]。以标准差表示地表平整度,计算式为
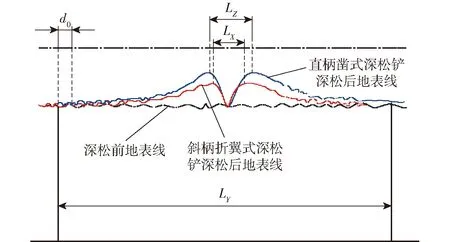
图9 深松作业横截面示意图Fig.9 Sketch map of cross section of subsoiling operation
(7)
式中ai——第i次测量的深松前后地表至水平基准线的垂直距离
aij——第i次测量中第j个等分点的深松前后地表至水平基准线的垂直距离
ni——第i次测量中的测试点数
选取深松深度为350 mm,作业速度为3.6 km/h的作业条件进行深松平整度和沟槽宽度分析。深松铲深松后沟槽呈V形,分别取两侧最高点。上述试验分别测量5次求平均值。仿真结果表明,斜柄折翼式深松铲和直柄凿式深松铲的地表平整度分别为16.01、20.17 mm,斜柄折翼式深松铲地表平整度提高了25.9%,更利于香蕉地砖红壤地区的深松整地;相比直柄凿式深松铲沟槽宽度均值LZ(214.5 mm),斜柄折翼式深松铲作业形成沟槽宽度均值LX(157.4 mm)降低了36.3%,有助于土壤保墒。
4 田间试验
为检验斜柄折翼式深松铲实际作业效果,并验证深松铲的仿真分析结果,对深松铲进行田间试验,获取实际深松铲牵引阻力和深松效果。
4.1 试验条件
试验装置包括:斜柄折翼式深松铲、直柄凿式深松铲、深松机架、拖拉机2台、Sense-RS型轮廓扫描仪、数显式推拉力计、米尺、便携式计算机1台。试验在海南大学机电工程学院农机试验田进行,试验田为砖红壤土。试验田长200 m,宽150 mm,土壤含水率为25.3%。
4.2 试验方法
将两个深松铲分别安装于深松机架上进行试验,拖拉机与拖拉机悬挂装置间安装拉力传感器,用于测量作业过程中的深松阻力,首先测量拖拉机空载时的耕作阻力,再测量安装深松机的深松阻力,则两者之差即为深松作业时的耕作阻力,耕作阻力直接通过数据线传输至计算机。试验区域按照要求划分,每个区域长70 m,宽20 m。试验开始前,在深松铲所在处挖一定深度土坑,将深松铲下降至深度为350 mm,将机架调整到水平位置并开启数据采集装置,根据试验条件保持作业速度恒定(图10)。同时,运用Sense-RS型三维轮廓扫描仪扫描深松前后地表轮廓和沟槽轮廓,得到地表平整度与沟槽宽度(图11)。

图10 耕作阻力测试系统Fig.10 Testing system of tillage resistance

图11 土壤轮廓扫描Fig.11 Soil profile scanning
为对应离散元仿真结果,试验时机具作业速度选择3.6 km/h。每次试验机车组在给定区域内行走平稳后的20 m长度内进行数据测量,每组试验重复5次求取平均值。
4.3 试验结果分析
依据标准JB/T 10295—2014,以耕作阻力、地表平整度和沟槽宽度为分析指标,斜柄折翼式深松铲性能试验结果如表4所示。试验结果表明,在深松深度为350 mm的条件下,斜柄折翼式深松铲和直柄凿式深松铲的实际耕作阻力(2 441.6、2 837.3 N)相对于离散元仿真结果(2 450.9、2 847.2 N)的误差为0.38%和0.37%;实际地表平整度(15.85、19.78 mm)相对于离散元仿真结果(16.01、20.17 mm)的误差为1.01%和1.97%;实际深松沟槽宽度(155.7、212.3 mm)相对于离散元仿真结果(157.4、214.5 mm)的误差为1.09%和1.04%。田间试验结果表明,离散元仿真得出的分析结果有效。相对于砖红壤地区常用的直柄凿式深松铲,斜柄折翼式深松铲作业时,耕作阻力较小,土层扰动量少,深松面积大,适用于香蕉地砖红壤地区的土壤深松。

表4 深松铲实际松土效果Tab.4 Effect of subsoiling shovel
5 结论
(1)基于海南香蕉种植地区砖红壤土土层深厚、质地黏重、含水率高的土壤特性,设计斜柄折翼式深松铲,可有效减少深松作业阻力,增大松土面积,提高地表平整度并降低沟槽宽度。
(2)基于砖红壤土特殊物理性质差异,运用离散元软件EDEM 2.6建立耕作层、犁底层、心土层3层土壤模型,进行深松虚拟仿真试验;基于不同的作业速度,探究斜柄折翼式深松铲在同一深松深度下的土壤颗粒混合情况、土层扰动效果和耕作阻力,获取最佳作业速度在3.24~3.96 km/h之间;通过对比仿真研究结果显示,相比于直柄凿式深松铲,斜柄折翼式深松铲的工作阻力可降低16.2%,地表平整度提高了25.9%,深松后沟槽宽度减小了36.3%。
(3)通过对比分析虚拟仿真与田间试验,斜柄折翼式深松铲和直柄凿式深松铲的耕作阻力、地表平整度、深松沟槽宽度的实测值与仿真值之间的误差分别为0.38%、1.01%、1.09%和0.37%、1.97%、1.04%,实际测量值与仿真分析结果的误差在0.37%~1.97%之间,表明土壤模型的力学特性基本符合海南地区砖红壤土特性;与直柄凿式深松铲对比,斜柄折翼式深松铲的松土面积明显增加,土层扰动明显降低,提高了地表平整度并减小沟槽宽度。
(4)试验表明所设计深松铲有助于打破犁底层,降低土壤紧实度,且在作业过程中对土层扰动较小,对地表轮廓破坏较小。
猜你喜欢
农业技术与装备(2022年3期)2022-05-31
商学院(2019年12期)2019-12-14
鹿鸣(2018年1期)2018-01-30
北极光(2016年6期)2016-08-17
江苏农业科学(2015年9期)2015-10-20
吉林农业(2014年1期)2014-03-21
诗潮(2009年9期)2009-11-02
