纯BDS导航条件下无人机倾斜摄影可行性分析
2022-04-06 02:10伦泽华
北京测绘 2022年3期
伦泽华 李 虎 李 浩
(中国人民解放军61206部队, 北京 100042)
0 引言
北斗卫星导航系统以下简称北斗系统(BeiDou navigation satellite system,BDS)是中国自行研制的全球卫星导航系统(global navigation satellite system, GNSS),是我国着眼于国家安全和经济社会发展自主建设、独立运行的卫星导航系统,自2018年12月27日起,北斗三号基本系统完成建设,高精度接收设备及处理软件不断优化、研发[1],北斗系统已经能够使我国摆脱对外国导航卫星的依赖,独立承担导航定位任务[2-3]。卫星导航系统对于无人机,相当于飞行员之于有人驾驶飞机,是无人机实现位置、方向、速度感知的重要系统。目前,市面上测绘无人机所使用的导航定位装置普遍采用以BDS导航为主导的多频接收设备,可同时接收BDS、美国全球定位系统(global positioning system, GPS)、俄罗斯格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)等多型导航卫星信号,经联合平差进行导航定位,但仅依靠纯BDS进行无人机倾斜摄影的模式较少使用,且缺乏效果、精度验证。本文将纯BDS无人机与未改装的混合GNSS无人机在飞行系统、地面辅助系统及测绘成果精度等方面进行了试验对比分析,通过在不同时间段、不同风力条件下进行的24架次飞行、7项对比试验,得出了纯BDS对无人机倾斜摄影测量的影响分析结论,以期为更多测绘设备进行纯BDS改装提供有意义的参考。
1 试验条件及方法
为确定BDS在无人机倾斜摄影方面的稳定性、可靠性及定位精度,需要对无人机飞行系统、控制测量系统及内业处理成果等3方面进行量化验证[4-6]。本文对1架六旋翼无人机、1台后差分基站、1套实时动态载波相位差分技术(real time kinematic,RTK)进行了BDS改装,通过软件方式关闭了无人机、RTK、后差分基站设备中的外国卫星导航信道、通过硬件改造拆除了无人机飞行控制芯片中的GPS等外国卫星导航定位模块,仅依靠BDS对无人机进行导航定位及地面控制。
试验场地在华北某居民地,试验于2021年3月5日至3月15日昼间选取不同风力条件进行,测区面积约2万m2,试验所使用的飞行设备为深圳科卫泰公司KWT-X6L六旋翼无人机2架(BDS接收机、GNSS接收机各1架),无人机后差分定位设备为中海达公司UBASE后差分基站2台(BDS接收机、GNSS接收机各1台),地面像控测量设备为华测X5型测量RTK 2套(BDS接收机、GNSS接收机各1套),倾斜摄影测量设备为上海航遥公司AMC536倾斜航摄仪1部,上述设备的国产化率均达到90%以上,关键部件、芯片的国产化率为100%。试验方法为对比分析法,基本思路为:首先验证BDS无人机系统的飞行稳定性,确定无人机飞行安全后,开始验证地面辅助系统的稳定性,若飞行安全及地面辅助系统稳定性均满足测绘要求,则将无人机获取的数据资料按照倾斜航摄的流程进行处理,并将测绘成果定位精度进行分析验证,最终得出BDS无人机用于倾斜摄影的可行性结论。
2 飞行稳定性验证
2.1 定位参数
无人机获取导航卫星定位参数的时间和精度决定了导航效果的准确性,首先对无人机定位参数情况进行评估,可保证后续试验飞行安全。试验对BDS与GNSS无人机系统同时进行通电测试,经过在无遮挡地域、略有遮挡地域及半遮挡地域分别进行的9组试验,经数据分析得知:从通电开始到完成无人机自检定位,BDS无人机的平均搜星时间约为20 s,接收卫星数10~17颗;GNSS无人机的平均搜星时间约为15 s,接收卫星数20~34颗,由于只使用BDS,BDS无人机在通电后的搜星时间较长,搜星数量较少,但仍然满足无人机飞行所需的导航定位条件,可进行下一步试验。
2.2 起降操控
考虑到BDS无人机搜星数量的减少可能会对飞行安全造成不确定影响,本文对无人机起降操控进行了定量验证,共设计定点起降、定点悬停、定姿悬停3组试验,每组试验在不同起降高度或不同天气条件下进行,试验均使用遥控器操作,同时起降BDS与GNSS无人机,飞行20架次,利用激光测距仪测算无人机起飞/降落后距离起飞/降落点的水平距离对比无人机定点起降稳定性,利用激光测距仪测算处于悬停状态无人机3 min内与悬停点的最大漂移距离对比无人机定点悬停稳定性,利用地面站罗盘测算处于悬停状态无人机3 min内最大俯仰/横滚角及抖动频率对比无人机定姿悬停稳定性(表1至表3)。试验结果表明,BDS无人机操控正常,起降稳定性与GNSS无人机无明显差别。
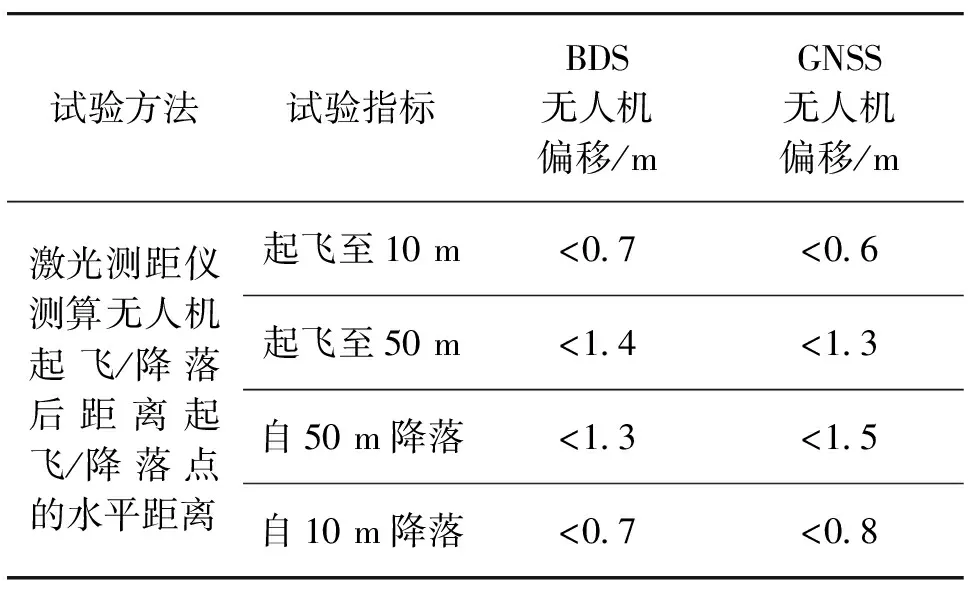
表1 无人机定点起降稳定性对比
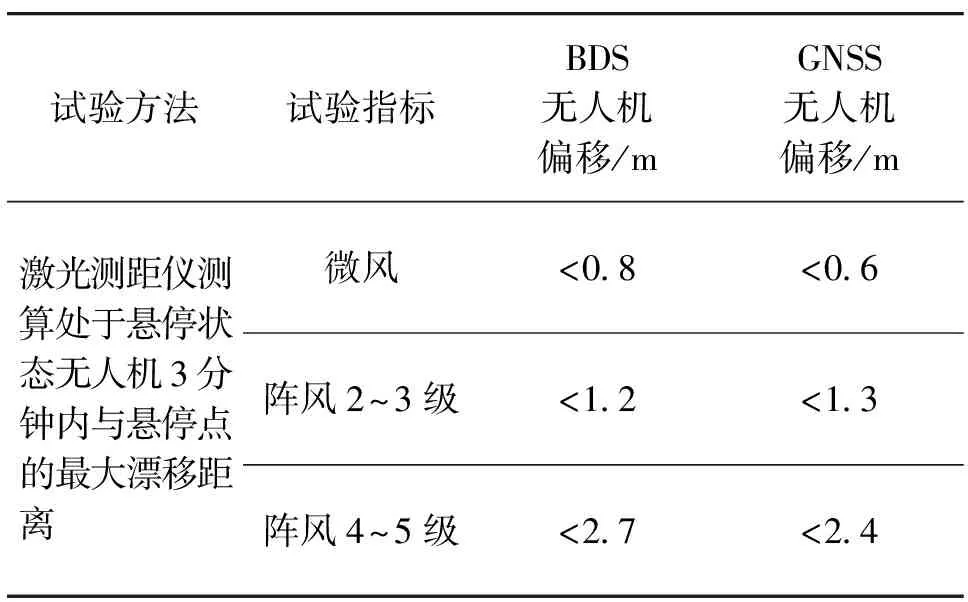
表2 无人机定点悬停稳定性对比

表3 无人机定姿悬停稳定性对比
2.3 航飞稳定性
航飞稳定性试验规划航高60 m,巡航速度7 m/s,飞行2架次,依次使BDS无人机与GNSS无人机飞行相同航线。分别对比预先设计航点坐标与BDS无人机/GNSS无人机实际飞行记录坐标之差,验证无人机在航飞过程中有无偏离航线、上下浮动等飞行不稳定因素。经验证,在水平方向,BDS无人机航迹拐点与设计航线拐点坐标平均偏差约3.4 m,GNSS无人机航迹拐点与设计航线拐点坐标平均偏差约2.1 m;在垂直方向,BDS无人机航高比设计航高整体偏低约1.3 m,GNSS无人机航高比设计航高整体偏低约0.8 m,两者误差相近,且在航飞过程中,未出现定位失锁、信号失联,未观察到无人机飞行姿态明显晃动,说明在本试验条件下,纯BDS能够满足无人机飞行稳定性要求。
3 辅助测量系统验证
3.1 无人机后差分定位精度
后差分GPS(differential GPS,DGPS)是无人机测绘系统的重要组成部分,DGPS系统是由地面基准站向无人机载流动站实时发送GNSS差分改正值,从而获取无人机运动过程中精确空间位置坐标的手段,将DGPS系统和航摄仪集成在一起的航空摄影,经与惯性测量单元(inertial measurement unit,IMU)联合后处理,可直接获得每张航摄像片的6个外方位元素,航摄外方位元素直接决定了后续处理的效率及精度[7-9]。本文后差分基站使用中海达UBASE后差分系统,试验过程中,分别使用改装后的单北斗中海达UBASE型后差分基准站与未改装的中海达UBASE型后差分基准站,将BDS无人机与GNSS无人机分别放置在已知坐标点,手动触发航摄仪拍摄并记录坐标,通过与已知点坐标进行对比,分析得出不同导航模式下后差分定位精度区别。经验证,BDS后差分坐标与GNSS后差分坐标基本一致,详见图1和表4。

图1 BDS/GNSS后差分POS误差椭圆注:定位定姿系统(position and orientation system,POS)
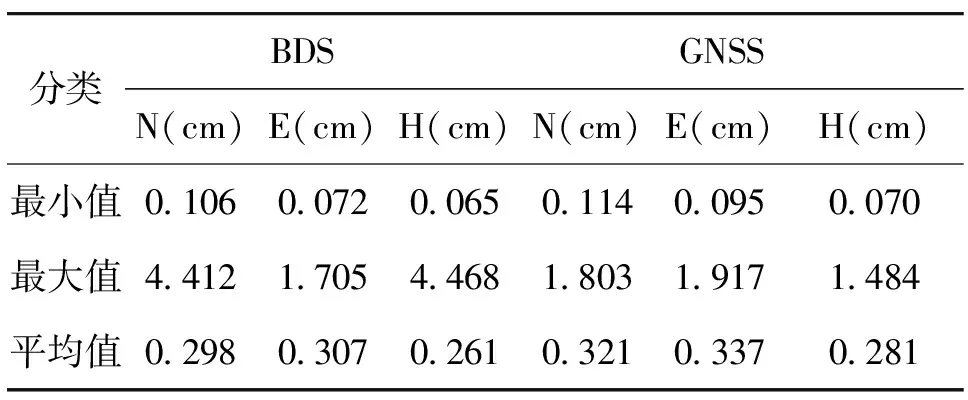
表4 POS不确定性对比表 单位:cm
3.2 地面控制测量精度
无人机倾斜摄影测量作业过程中,还需测量地面像控点以进一步提高测绘成果精度,目前,行业普遍使用网络连续运行参考站(continuously operating reference stations,CORS)RTK进行作业,本文使用改装后的BDS-RTK与GNSS-RTK进行对比试验[10],分别在测区内利用千寻网络CORS的方式测量9个已知地面点坐标,经验证,BDS-RTK与GNSS-RTK在使用千寻网络CORS测量的情况下,精度基本一致(表5)。
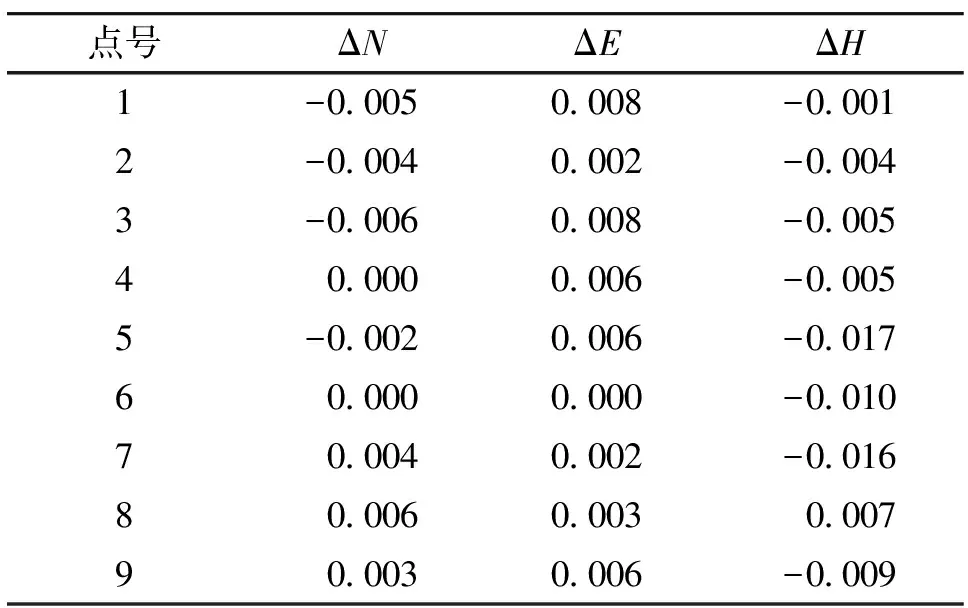
表5 BDS-GNSS RTK测量较差 单位:m
4 成果精度验证
4.1 成果定位精度
经上述验证,BDS无人机起降稳定性、飞行稳定性及辅助系统稳定性均达到了无人机倾斜摄影测量的要求,之后在无人机上搭载倾斜航摄仪,将BDS无人机与GNSS无人机分别按照相同航线规划参数在相同区域飞行进行倾斜摄影,之后按照内业处理步骤,利用航摄影像、地面控制测量成果及无人机POS数据进行空中三角测量,实景三维建模,并将模型点与已知点成果进行对比。经验证,BDS无人机三维模型成果定位精度与GNSS无人机基本一致,可满足1∶500测图精度要求,如表6、表7所示。
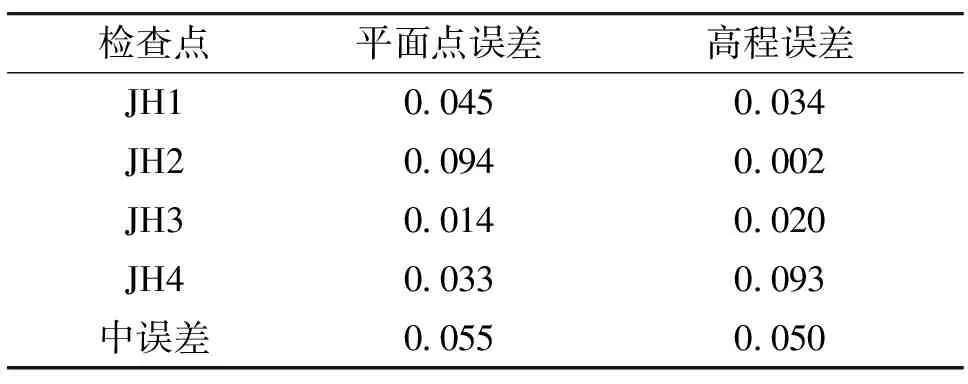
表6 北斗导航无人机成果精度检查表 单位:m

表7 混合导航无人机成果精度检查表 单位:m
4.2 三维模型效果质量
三维模型效果质量主要包含模型结构质量与模型纹理质量,本文对BDS与GNSS无人机模型效果进行分析,分别对比模型整体效果、纹理质量、结构质量,证实使用不同导航模式无人机,对三维建模效果无明显影响,如图2、图3所示。

图2 BDS/GPS模型效果对比

图3 BDS/GPS模型结构质量对比
5 结束语
经上述试验验证,本文对无人机进行的纯BDS改装基本成功,BDS无人机系统飞行稳定、精度可靠、成果质量达标,与GNSS无人机在性能上无明显区别,可用于开展无人机倾斜摄影测量工作,能够满足用户使用要求,使无人机摆脱对GPS等国外导航卫星的依赖,实现了无人机导航定位使用中国星的目标。本文的试验数据可为更多测绘设备进行纯北斗改装提供参考,但由于试验仅使用少量设备在华北地区小范围进行,地域不够广泛、试验条件不够全面,下步需重点进行完善。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
新农业(2018年3期)2018-07-08
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14