
AlignRT系统光学体表的验收和服役测试
2022-04-01 07:11:32王美娇李凯旋姚凯宁杜乙李俊禹周舜张健岳海振
中国医疗设备 2022年3期
王美娇,李凯旋,姚凯宁,杜乙,李俊禹,周舜,张健,岳海振
1. 北京大学肿瘤医院 北京市肿瘤防治研究所 放疗科 恶性肿瘤发病机制及转化研究教育部重点实验室,北京 100142;2. 中国人民解放军93199部队 门诊部,黑龙江 哈尔滨 150001
引言
基于锥形束CT(Cone Beam CT,CBCT)的图像引导放射治疗为患者提供准确的位置精度,但在实际治疗过程中会产生额外的辐射剂量[1]。而光学体表监测系统在不增加X射线照射的情况下,为图像引导放射治疗提供实时的位置监测和引导摆位[2-3]。有文献提到图像引导放疗的优势:可以对患者进行更准确的摆位、大面积六维监测、减少日常图像引导放射治疗带来的额外辐射、无创伤且不需要依赖摆位线、提高患者的舒适度等[4-7]。由于其准确的精度,光学体表监测目前被广泛地应用在临床的不同部位,包括立体定向放射外科(Stereotactic Radiosurgery,SRS)[8-9]、乳腺癌(自由呼吸和深呼吸屏气治疗)、立体定向体部放射治疗、头颈部、儿童等[10-14]。
本研究采用AlignRT系统(Vision RT 公司,伦敦,英国)作为光学体表监测系统,可用于治疗前的患者摆位和/或治疗期间的患者运动监测。患者摆位的精确性是保证剂量传递的前提,因此保证AlignRT的精度是至关重要的。本文参照国际和国家相关标准及其制定的验收手册对AlignRT系统的各项指标进行详细的临床验收和服役测试,提供相关性能的标准参数,用以确保临床治疗过程中患者位置和实时运动监测的精确性和可靠性。
1 材料与方法
1.1 AlignRT系统
系统由三个安装在治疗室天花板上的摄像单元组成,每个摄像单元包含一个投影仪和两个摄像头,用于捕获和重建三维表面图像。摄像单元的安装基于直线加速器辐射等中心的空间位置关系,通过校准、调试和质量保证可以将AlignRT系统和直线加速器辐射等中心之间的偏差降至最低[15]。
1.2 AlignRT系统配置验收
根据国家相关标准和AAPM TG147号报告,临床使用之前必须对系统进行临床验收[16-17]。验收系统配置分两部分:① 技术配置,包括IEC坐标系系统、摄像单元的敏感性、网络通信和患者数据存储管理;② 临床配置,包括患者数据设置、不同解剖部位阈值设置、校准程序和访问权限。
患者数据在导入和使用过程中,可以被配置成本地数据或网络数据。本地数据的优势在于可以快速获取数据,实时运动监测,无网络延时;网络数据则可以更安全地下载保存和备份数据。
1.3 AlignRT系统校准验收
(1)平板校准:AlignRT的校准板是由黑色的十字交叉校准线和黑点阵列构成的100 cm×100 cm白色背景板[18]。将校准板放置于治疗等中心处,放射源到校准板的距离(Source Skin Distance,SSD)为100 cm,使校准板的十字校准线与机架的光野(打开至40 cm×40 cm)十字叉丝完全重合。首先进行外部校准(即光学体表等中心校准),每个摄像单元捕获校准板的图像后,软件自动调整窗宽识别校准板上的可见点。此过程校准AlignRT等中心和摄像单元之间的位置,利用阵列中每个点相对于等中心的已知空间位置,校准AlignRT系统以重建三维表面图像。然后进行光学校准,应用软件自带的高级摄像机优化功能。治疗室内照明条件每天应保持恒定,用于日常质量保证的校准条件。在平板校准后,需要进行模体校准。
(2)模体校准(辐射等中心校准):采用Vision RT立方体校准模体(体积为15 cm×15 cm×15 cm)来校正AlignRT等中心和MV辐射等中心之间的亚毫米残余误差[15]。首先获取校准模体的表面参考图像以确定立方体相对于AlignRT等中心的位置。使用电子射野成像设备在机架角度为180°、90°、0°和270°时分别采集正交MV图像,使用图像中心方法确定校准模体相对于加速器MV等中心的六维位置,如果偏差值大于0.2 mm,需要重新校准,即重复进行上述(1)和(2)步骤。AlignRT系统提供计算每个系统的等中心以及六维方向上差异的软件。
(3)日检:将校准板的十字校准线与机架的光野(打开至40 cm×40 cm)十字叉丝完全重合放置于治疗等中心处,获取等中心在六维方向上差异的偏差值,应小于阈值(0.5 mm)。
1.4 服役测试
(1)热稳定性测试:将机架置于0°,治疗床在横向和旋转位置均设置为零,测试模体放置加速器等中心位置,获取并计算体表连续监测20 min内的总体漂移。
(2)机头遮挡光学体表稳定性测试:将机架置于0°,测试模体放置于加速器等中心位置,室内灯光与质控时的光源保持一致,获取体表10 s到20 s监测值。转动机头遮挡左/右侧光学体表,监测读数的稳定性,并计算有无遮挡时监测的读数精度。
(3)环境照明测试:将机架置于0°,测试模体放置于加速器等中心位置,室内灯光与校准时摆位等中心的光源保持一致,监测10~20 s,再切换至治疗等中心时的光源,监测光源稳定性。
(4)相对位移精度测试:选用QUASAR™公司生产的Penta-Guide模体,放置于加速器等中心位置,获取从计划系统导出的外轮廓参考图像,以DICOM格式发送到AlignRT系统,设置定义感兴趣区(Region of Interest,ROI),阈值为1 mm。将机架置于0°,治疗床在进出(z轴)、左右(x轴)方向分别移动±1 mm、±5 mm、±1 cm、±2 cm、±3 cm、±5 cm、±8 cm、±10 cm和±12 cm,在升降方向(y轴)移动±1 mm、±5 mm、±1 cm、±2 cm、±3 cm、±4 cm、+8 cm,分别监测10~20 s,并与治疗床的实际位移相比较,记录偏差值。
(5)床角度依赖测试:将Penta-Guide模体放置于加速器等中心,获取DICOM参考图像,设置ROI,阈值为1 mm/1°。治疗床0°时采集CBCT图像,进行图像配准,并与体表监测系统进行对比。采用临床SRS常用角度,旋转治疗床(10°、20°、30°、45°、60°~90°,350°、340°、330°、315°、300°~270°)获取治疗过程中监测的读数,与实际治疗床的读数相比较,计算两者之间的偏差。
(6)多中心治疗计划方案的精度测试:从CT模拟定位、计划设计、数据传输(包括外轮廓结构、等中心坐标和计划信息)至加速器剂量交付均选用Penta-Guide模体进行端对端试验的引导摆位和实时监测。根据临床SRS的靶区位置摆位,将模体分别移至靶点1、2和3的位置,每个靶点重复摆位10次,每次均采集CBCT图像同时监测AlignRT读数,分别得到30组CBCT和AlignRT在x、y、z轴和床旋转(Rtn)、进出倾斜(Pitch)和左右旋转(Roll)6维方向的位置误差数据。
1.5 统计学分析
采用SPSS 25.0软件行Pearson统计学方法相关分析,其中0.8~1.0为极强相关,0.6~0.8为强相关,0.4~0.6为中等程度相关,0.2~0.4为弱相关,0~0.2为极弱相关或无相关。采用Bland-Altman统计学方法检验AlignRT和CBCT的一致性,服从正态分布采用95%CI值表示。设P<0.05差异有统计学意义。
2 结果
2.1 摄像单元热稳定性能
光学体表的摄像单元在预热时有热漂移效应。由图1可知,AlignRT在实时运动监测过程中,热漂移在垂直方向和进出方向比较明显,最初800 s内垂直方向显示出0.5 mm量级的初始基线漂移,进出方向显示出0.4 mm量级的偏移,在800 s后逐渐稳定下来。左右方向和三个旋转方向稳定性能较好,漂移不明显。
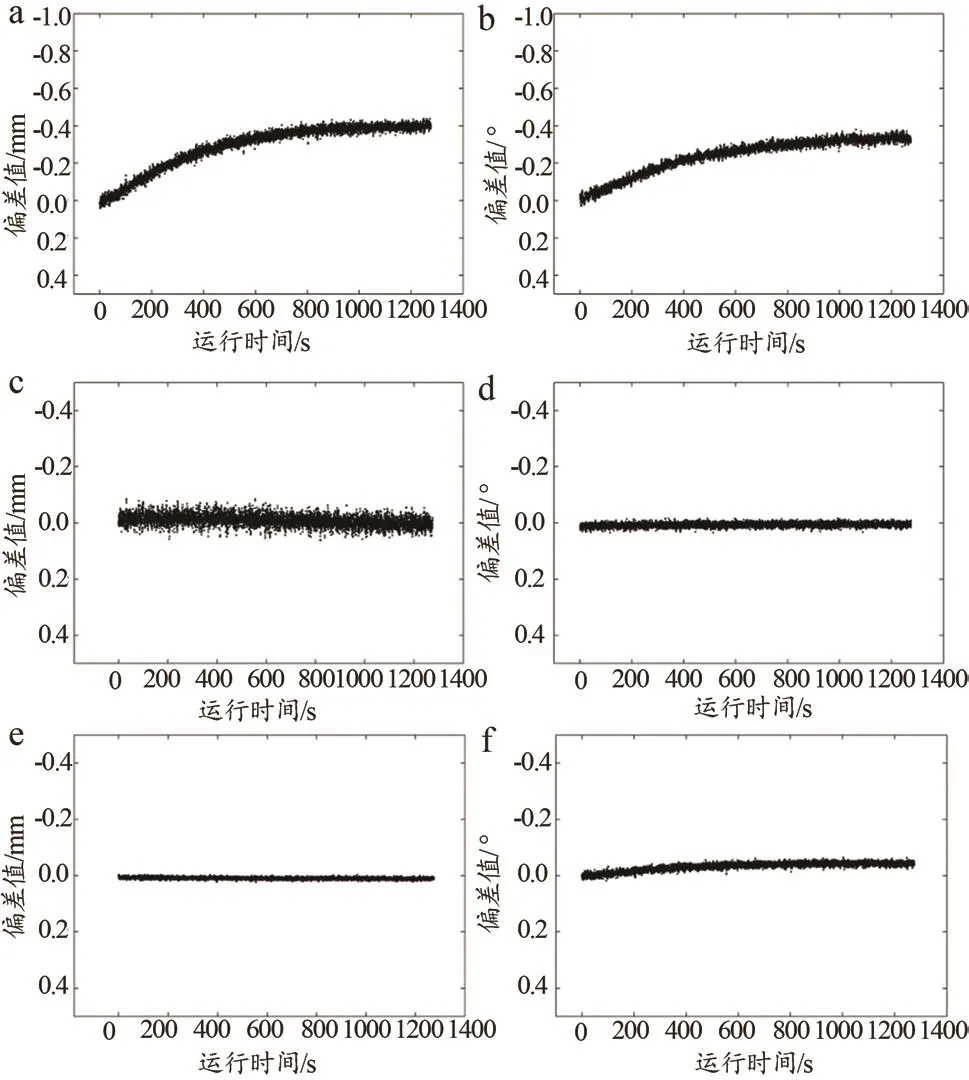
图1 热稳定性—六维方向偏差值与运行时间的关系图
2.2 机头遮挡稳定性能
机架在0°左右无遮挡时,AlignRT实时监测稳定,当机架旋转过程中左/右侧摄像单元遮挡时,最大偏差为左侧摄像单元遮挡时的垂直方向上,偏差仅为0.19 mm,见表1。表明机架在旋转过程中即使遮挡了同侧摄像单元,对实时监测的精度影响很小。
表1 机架在0°和旋转中遮挡摄像单元时六维方向的稳定性能偏差值(±s,mm)
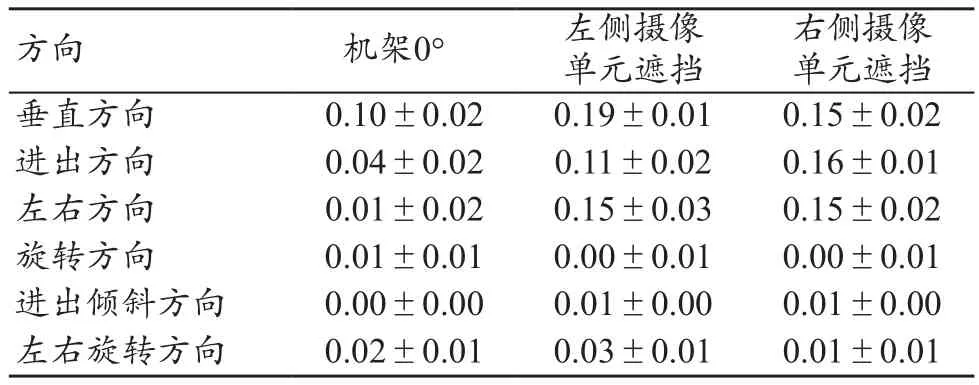
表1 机架在0°和旋转中遮挡摄像单元时六维方向的稳定性能偏差值(±s,mm)
右侧摄像单元遮挡垂直方向 0.10±0.02 0.19±0.01 0.15±0.02进出方向 0.04±0.02 0.11±0.02 0.16±0.01左右方向 0.01±0.02 0.15±0.03 0.15±0.02旋转方向 0.01±0.01 0.00±0.01 0.00±0.01进出倾斜方向 0.00±0.00 0.01±0.00 0.01±0.00左右旋转方向 0.02±0.01 0.03±0.01 0.01±0.01方向 机架0° 左侧摄像单元遮挡
2.3 环境照明性能
从摆位等中心到治疗等中心时,六维方向上AlignRT监测结果变化均为0,证明环境照明性能稳定。由于光学体表系统对环境照明的影响非常明显,治疗室内照明条件每天应保持恒定。
2.4 相对位移精度性能
结果如图2所示,在左右、进出和垂直方向的相对位移偏差值很小,均在阈值范围内(1 mm),最大位移偏差在垂直方向,仅为0.03 mm。表明AlignRT系统的监测能力处于亚毫米级别,精度极高。
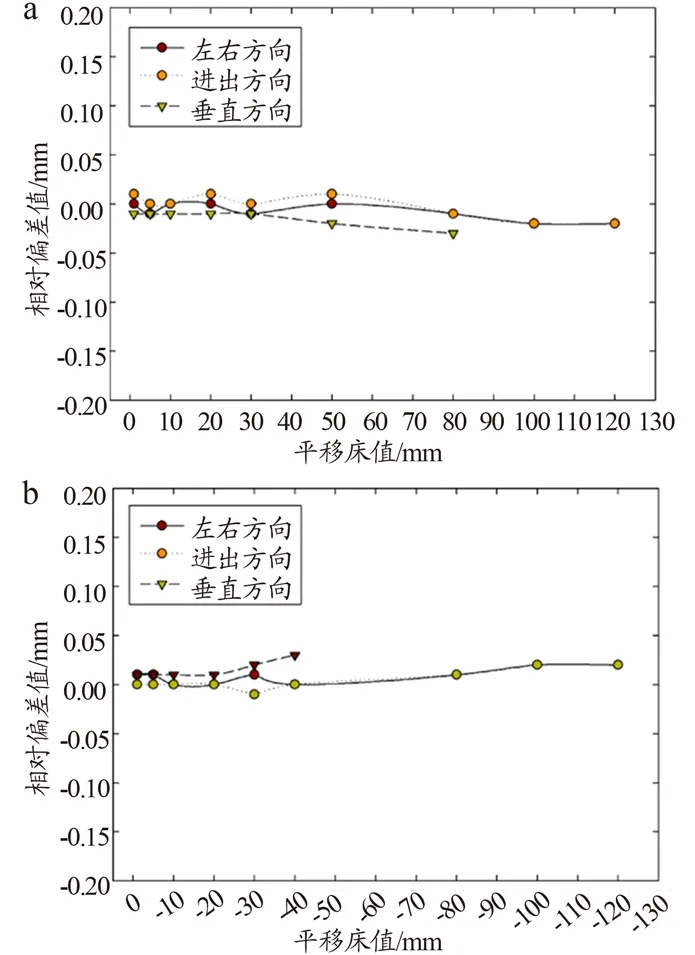
图2 Penta-Guide模体在治疗床平移时的相对位移精度
2.5 床角度依赖性能
如图3所示,治疗床在0°时,六维方向偏差值最小,均为0°。当治疗床旋转至90°时,左右旋转方向偏差值最大,为0.3°。各治疗床角度下的六维方向偏差均小于阈值(1 mm/1°),表明AlignRT对治疗床角度的依赖性小。
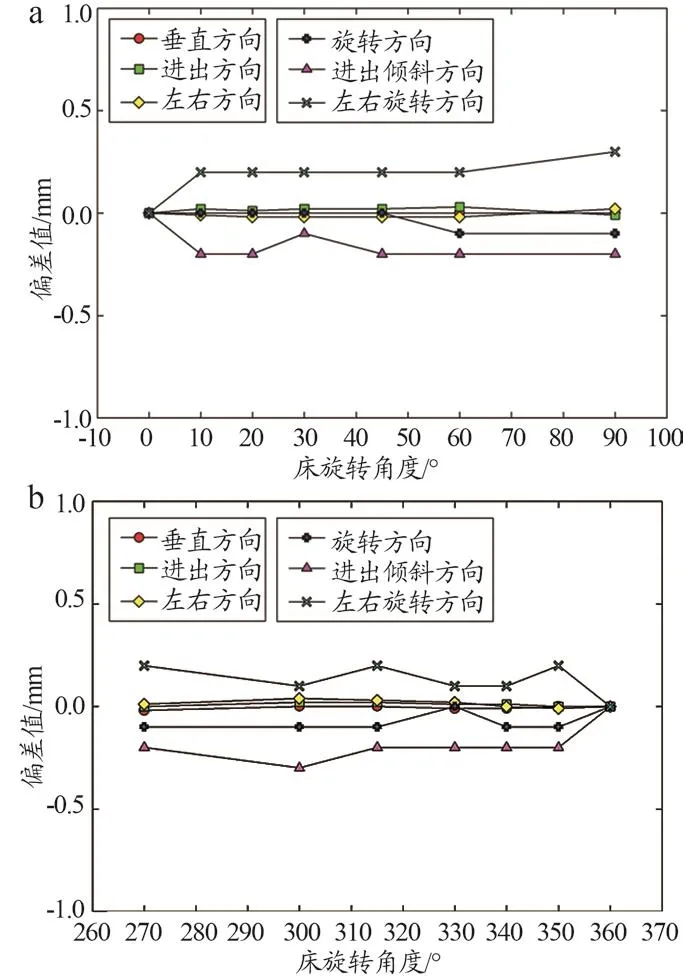
图3 Penta-Guide模体在治疗床旋转时六维方向上的残余误差
2.6 多中心治疗计划的摆位精度
结果如表2所示,在x、y、z方向平移误差和旋转误差,两种方法在三个旋转误差方向,R>0.8均呈极强相关;在x和z方向的平移误差上,R>0.6呈强相关;在y轴方向R=0.5左右相关性较弱,线性回归分析如图4所示。两种系统95%CI值平移偏差在0.1 mm以内,旋转角度在0.3°以内(P<0.01),均在阈值范围内。图5为采用Bland-Altman分析的95%CI值。
表2 AlignRT和CBCT在多中心计划六维方向摆位相关性比较(±s)

表2 AlignRT和CBCT在多中心计划六维方向摆位相关性比较(±s)
组别 x/cm y/cm z/cm Rtn/° Pitch/° Roll/°CBCT -0.03±0.03 -0.04±0.02 0.00±0.02 -0.06±0.19 0.04±0.13 0.02±0.10 AlignRT -0.05±0.03 -0.05±0.01 0.00±0.01 0.01±0.17 -0.13±0.15 0.06±0.10 P值 <0.001 0.003 <0.001 <0.001 <0.001 <0.001相关系数 0.602 0.521 0.623 0.860 0.918 0.813
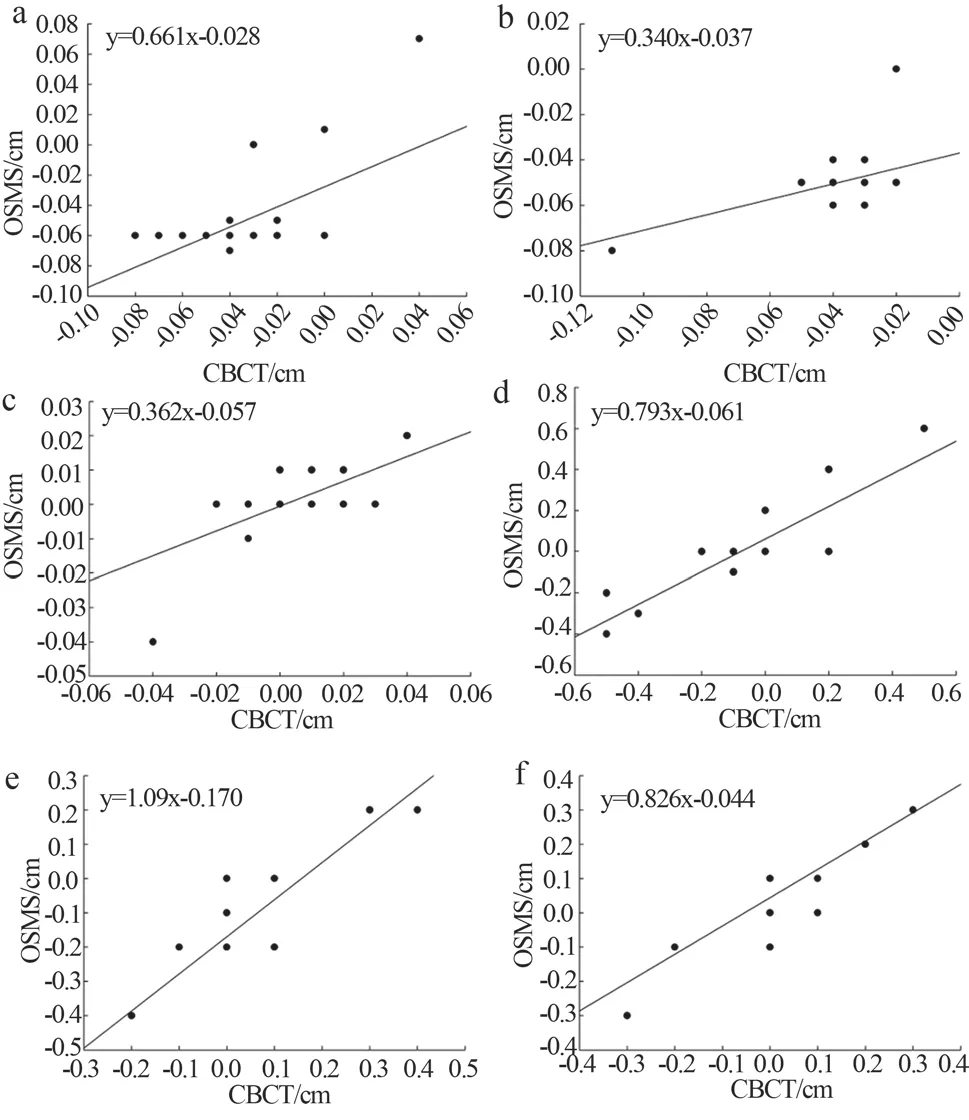
图4 CBCT与光学体表系统线性关系
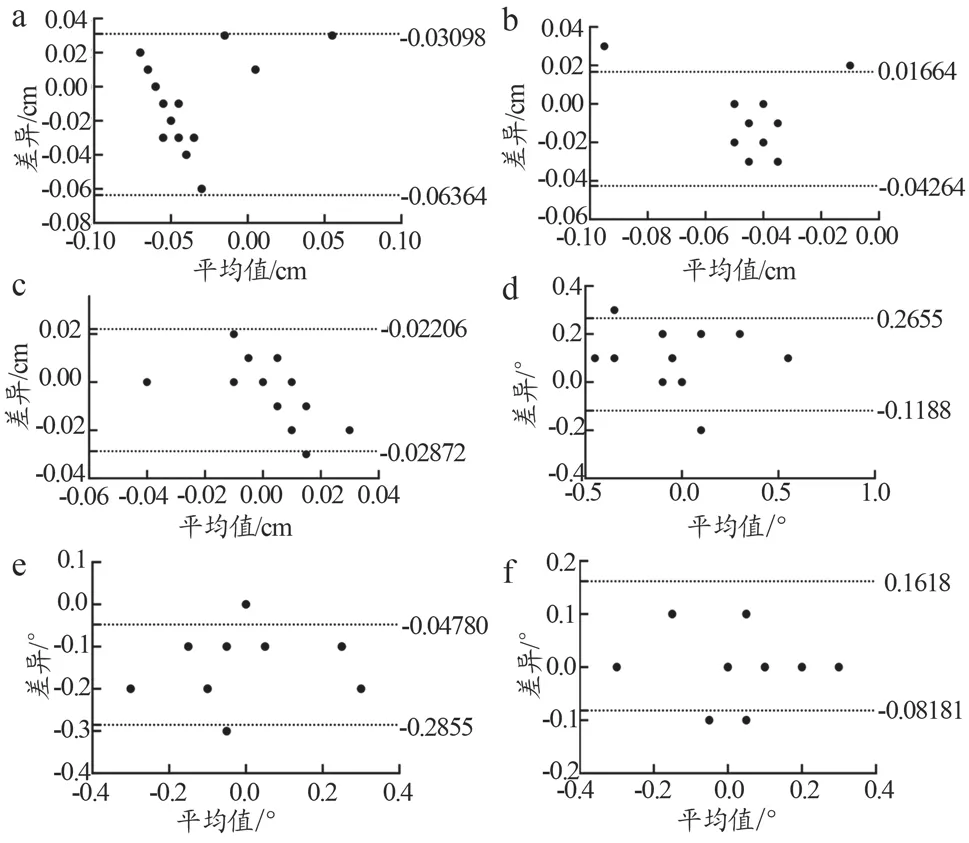
图5 CBCT与光学表面系统95%CI值
3 讨论
AlignRT系统中无创且无辐射的实时监测技术可以提高放疗的精确性,对其进行验收和服役测试尤为重要。AlignRT系统的三个摄像单元分别从三个方向采集三维表面图像,使用内置算法将其整合成患者的表面图像。采集过程中获取的体表越完整,AlignRT系统监测结果就越精确。在临床使用之前,验收校准是必不可少的,包括系统配置和系统校准。其中平板校准可采用两种方法:高级摄像机优化校准[19]和升床校准。对于没有ACO的系统,可以通过调整治疗床至SSD=92.5 cm获取校准板的位置。由于肿瘤位置处于皮肤深处,因此升高的平板位置更接近患者表面测量条件。
AlignRT系统温度稳定时,可以观察到热漂移回落到原始基线且趋于稳定。SRS治疗精度要求较高,叠加基线热漂移可能导致超出阈值,故应在系统温度稳定热漂移回落时开始治疗。在临床使用时,初始设置AlignRT(包括治疗前的监测和预热)后,系统达到热平衡,确保整个监测过程保持稳定状态。
床旋转过程中AlignRT系统的精度变化由多种因素产生:系统偏差(AlignRT和治疗等中心之间的偏差)、内置数据(不同的床转角由不同的体表构成)和外部变化(床在移动过程中产生的运动)。有研究表明光学系统的监测精度随治疗床旋转角度增大导致误差增加,在90°时参考图像系统等中心误差值最大[20],这与本文的研究结果一致。由于SRS治疗多采用非共面治疗方式降低治疗床的角度依赖,可提高治疗精度。实际上,治疗床旋转过程中的晃动和患者的不自主运动也会影响治疗床旋转时的误差。所以我们需要通过系统校准将所有角度下的AlignRT误差降至最低,减少对治疗床角度的依赖。
对于SRS治疗,AAPM TG135号报告建议进行端对端测试,以检查整个系统的总体精度[21]。整个SRS治疗流程都遵循从CT模拟定位、治疗计划设计、AlignRT设置、CBCT图像采集到剂量交付的整个过程。有研究表明AlignRT和CBCT之间存在亚毫米的差异,这与本文的结果是一致的[22]。在CBCT期间进行AlignRT监控,可以在图像采集过程中监测到患者的运动。一旦监测到患者移动,额外的验证步骤是必要的。本文采用SRS靶区作为端对端试验,主要是由于SRS治疗较其他治疗要求的精度更高。
4 结论
AlignRT系统的验收和服役测试包括系统配置、系统校准、性能测试以及完整的端对端试验。对于系统校准,建议每月至少一次平板校准和模体校准,每日进行日常质量控制,确保AlignRT与直线加速器辐射等中心的偏差值降到最低。AlignRT系统的性能测试结果显示,能够保证治疗过程中的患者位置和实时监测的精确性。根据临床需求,建议对SRS计划进行端对端试验,确保光学体表系统的总体精度在阈值范围内。
猜你喜欢
四川蚕业(2022年1期)2022-06-06 02:04:02
大科技·百科新说(2022年4期)2022-05-30 10:48:04
计算机与现代化(2021年5期)2021-05-27 06:51:34
家庭影院技术(2019年12期)2020-01-19 02:07:20
智能计算机与应用(2019年1期)2019-01-11 06:03:06
复杂系统与复杂性科学(2017年4期)2017-07-07 02:07:48
工业设计(2016年4期)2016-05-04 04:00:27
自动化学报(2016年5期)2016-04-16 03:38:40
中国卫生标准管理(2015年1期)2016-01-14 03:41:21
中国医疗美容(2015年2期)2015-07-19 10:11:59
