数字微流控封闭-开放区间的液滴两区运动
2022-03-31 06:08:00陈立国
光学精密工程 2022年6期
王 鹤,陈立国
(1.苏州大学 机电工程学院,江苏 苏州215021;2.河南工程学院 机械工程学院,河南 郑州451191)
1 引 言
随着微机电系统的高速发展,用于处理微液滴的数字微流控技术在生物、医学以及分析化学等多个领域得到了广泛应用[1-3]。在厘米级的平面芯片上,通过一定的驱动方式操控含有细胞、蛋白质、DNA或其它样本、试剂的液滴以完成分配、输运、混合和分裂四种基本操作,用于常规生物医学实验室的各种分析和检测。该技术具有单独处理每个液滴的能力,能够有效避免交叉污染,大大减小了样品和试剂的消耗量,缩短了生化反应时间,实现对液体的精确定量控制[4-5]。
数字微流控芯片的结构主要有两种,分别是封闭式和开放式结构,两者各有独特的优势。前者不仅可以实现四种液滴基本操作,还能够提供可靠且可重复的液滴体积控制;后者虽然不易实现液滴分配和分裂,但却便于与其他液体处理和操控工具以及表面分析设备进行集成[6,7],而且液滴的混合和蒸发(用于样品的浓缩)也更容易实施。虽然可以通过将封闭式结构与在线分析方法加以集成来实现许多应用[8],但是实施起来往往比较麻烦,而且对于某些复杂的应用来说,需要将液滴从片上移走以便进行离线处理,如净化[9]、生物培养[10]或质谱评估[11]。对于开放式结构,则需要一个非常关键的离线操作——样品加载,即需要使用微注射器将液滴加载到芯片上[12-15]。该操作不仅繁琐还会影响可重复性。
因此,需要一种技术将两者优点加以整合,使其在液滴物理操作中既具有封闭式结构的通用性又具有开放式结构对检测系统的易集成性,同时保持低成本、易制造的优势。将数字微流控芯片的封闭式和开放式结构集成在同一芯片上,这种结构配置被称之为混合式结构。先在封闭区从储液池中分配出微液滴,并根据应用要求,通过其它液滴基本操作对封闭区多个液滴进行独立且实时的控制以完成对样品的预处理,然后将其驱动到开放区来完成后处理和分析检测。必要时,还可以根据应用要求将液滴返回封闭区,并对其实施所需的液滴操作和分析,或者在开放区直接将液滴加以收集。
集成的封闭-开放混合式结构的关键就是在封闭区和开放区边界处的液滴运动。Berthier等人[16]通过分析液滴在跨越两区边界时的压力变化来研究这一问题,并发现只有封闭区上下极板间距在合适的范围内,才能实现液滴在两区间的自由往返运动。Wang等人[17]设计了带有倾斜上极板的混合式结构,也是从压力变化的角度分析了两区之间的液滴运动。压力的分析计算通常需要利用接触角信息才能导出界面曲率半径。然而,介电液滴(或者受高频电场作用的水液滴)在电驱动下几乎没有接触角上的变化,因此很难定量评估这类液滴的压差[18-19]。机电模型的建立则不需要接触角或液体分布信息,非常适合于水和非水(介电)液滴的受力分析与计算。因此,利用机电模型通过力平衡分析法计算出电驱动力来分析液滴两区运动[19-20],这是目前定量评估封闭-开放区间液滴运动最直接的方法[21]。
2 力平衡分析液滴两区运动
力平衡分析法是通过比较液滴受到的作用力来完成对液滴两区运动的分析。由于电湿润力是外加电压U的函数,因此可以通过对电湿润力的分析简便地估算出液滴在两区之间运动的电压。由于液滴在Teflon®AF上的接触角比较大(将近120°),因此,处于封闭区和开放区的液滴在形状上会有很大的变化。液滴在封闭区受到上下极板的挤压作用,其形状呈扁平状,但板间间距很小,可将其近似看作是圆柱体;而在开放区则近似为一个球形。液滴运动到两区边界处的界面力分析如图1所示,上极板侧面未做任何处理,处于亲水状态,其中a,b分别表示液滴在封闭区和开放区的三相接触线(three phase contact line,TCL)有效长度;θ0和θU分别表示未施加电压和施加电压U时液滴与上下极板的接触角,δ和β则表示液滴与上极板侧面的接触角。
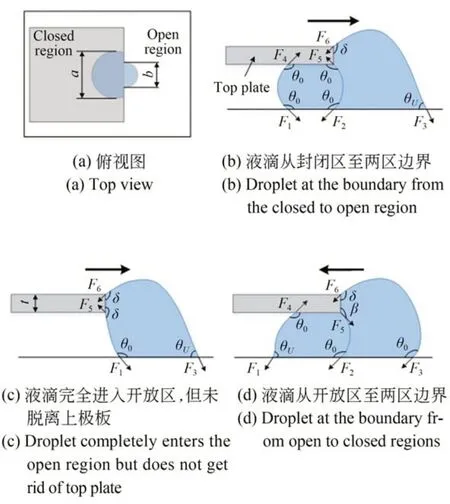
图1 液滴在两区边界处的界面力分析[21]Fig.1 Interfacial force analysis of droplets at the boundary between closed and open regions[21]
2.1 封闭区向开放区运动的力平衡分析
当液滴从封闭区运动至边界处时,液滴上的界面力分析如图1(b)所示。总界面力表达如下:

由于接触上极板侧面那部分液滴的上方没有位移,所以F6的影响可以忽略不计[21]。那么,作用在液滴上的总界面力化简为:

其中:F1=F4=F5=γa,F3=γb,F2=γ(a-b)。

由上可知,当驱动电压足够大使得θU<90°时,必有Fc-o>0,因此F3与(F1-F2)水平分量的共同作用是有助于液滴从封闭区进入开放区的。从公式(3)可知,当液滴从封闭区运动到两区边界时,即使没有外加电压(没有电湿润力F3),液滴也会被排出到开放区,因为此时驱动力Fc-o=γb|cosθ0|>0。上述情况通常是在液滴体积大小合适的情况下,通过外加电压轻松地驱动液滴从封闭区进入开放区。但是,如果液滴体积与驱动电极所对应的体积相比过大的话,则可能会由于来自封闭区的挤压效应而发生液滴堵塞在两区边界处的情况,这时可以通过适当增大过渡区的电极宽度来避免这一现象出现[16]。
事实上,虽然引入外加电压,在电湿润力的作用下液滴能够从封闭区完全进入开放区,但是由于上极板侧面亲水,在液滴与其之间低表面张力的作用下液滴会粘附在其侧面,难以脱离,如图1(c)所示。此时,作用在液滴上的总界面力为:

其中:F1=F3=γb,F5=F6=γ(b+t),t是上极板厚度,则

液滴要想脱离上极板侧面,就必须要满足Fo>0,有四种措施可以实现这一目标:(1)提高外加电压值,减小接触角θU;(2)增加开放区三相接触线的有效长度b;(3)减小上极板厚度t;(4)将上极板侧面涂上一层疏水材料,增大液滴与其之间的表面张力,增大两者之间的接触角δ(δ>90°)。虽然在液滴接触角达到饱和之前,增大电压确实可以明显减小接触角θU,增大Fo,使液滴脱离上极板侧面。但是数字微流控芯片的主要应用之一就是生化分析。实验中用到的液滴往往包含细胞、蛋白质、DNA或其他重要样本信息。过高的外加电压容易破坏样本,影响分析结果。因此在不增大驱动电压的前提下,使液滴摆脱上极板侧面粘附作用的措施才是真正适用于数字微流控技术应用的最佳手段。
2.2 开放区向封闭区运动的力平衡分析
图1(d)显示了液滴从开放区运动至两区边界处的界面力分析。作用在液滴上的总界面力为:

其中:F1=F4=γa,F3=γb,F2=γ(a-b)。由于上极板侧面亲水,接触角δ较大,F6的作用主要是拉动液滴沿侧面上下移动,其水平分量很小,因此,在公式(6)中可以忽略F6水平分量的影响。F5则是由于液滴进入封闭区后发生变形所造成的上极板对其施加的阻力。粗略估计F5的水平分量约 等 于F2的 水 平 分 量[21],即F5|cosβ|=F2|cosθ0|。因此,

由 式(7)可 知,只 有 当γa|cosθU|>γ(ab)|cosθ0|时,总界面力Fo-c>0,液滴才能顺利地从开放区进入封闭区。若θU<90°,则有cosθU>(a-b)| |cosθ0a。定义接触角阈值θUth为θUth=arccos[(a-b)| |
cosθ0a]。因此,增大驱动电压,将接触角θU降低到U Uth以下,便可实现液滴从开放区到封闭区的运动。接触角阈值是封闭区不同极板间距下液滴体积的函数,其随极板间距的减小以及液滴体积的增大而减小[21]。由于介电湿润驱动方式下存在接触角饱和现象,最小接触角θUmin通常为78°,所以若封闭区极板间距过小或者液滴体积与电极尺寸相比过大时,θUth就会过低,可能会低于θUmin,而且液滴易受到封闭区上下极板对其施加的严重空间挤压作用,从而造成液滴堵塞,这样液滴是无法从开放区运动到封闭区的。设法增大接触角阈值可以避免这一问题出现。适当增大极板间距(对应于较小的封闭区TCL有效长度a)或者增大开放区TCL有效长度b都有利于实现液滴从开放区向封闭区的运动。
3 芯片设计及制作
3.1 芯片的设计
在一个基底上制作出封闭式和开放式结构,芯片下极板两区电极阵列布置如图2(a)所示。封闭区是由若干个方形驱动电极组成,单个驱动电极尺寸为1 mm×1 mm,呈单排阵列布局;开放区则由若干个共面电极组成,包含一组尺寸为0.8 mm×0.5 mm的驱动电极,以及一个与之平行且宽度为0.8 mm的共面接地电极;所有电极之间的间距设计值为180μm。为便于实现液滴在两区间的往返运动,开放区驱动电极和共面接地电极的总宽度大于封闭区单个驱动电极的宽度(2×0.8>1),这相当于增大了液滴在开放区TCL的有效长度b,有利于液滴从封闭区向开放区运动时摆脱上极板侧面对其的粘附作用。上极板平行置于下极板之上,覆盖在用于形成封闭区下极板单排布局的驱动电极阵列上。
为了对比液滴两区运动性能的优劣,上极板置于下极板上方的横向位置略有不同,分为三种情况:(1)将上极板边缘正好置于两区边界中心处(模式Ⅰ);(2)沿下极板开放区左侧第一个驱动电极的左边缘向右平移100μm来布置上极板(模式Ⅱ);(3)类似于第(2)种情况,沿下极板封闭区右侧第一个驱动电极的右边缘向左平移100 μm(模式Ⅲ),如图2(b)所示。
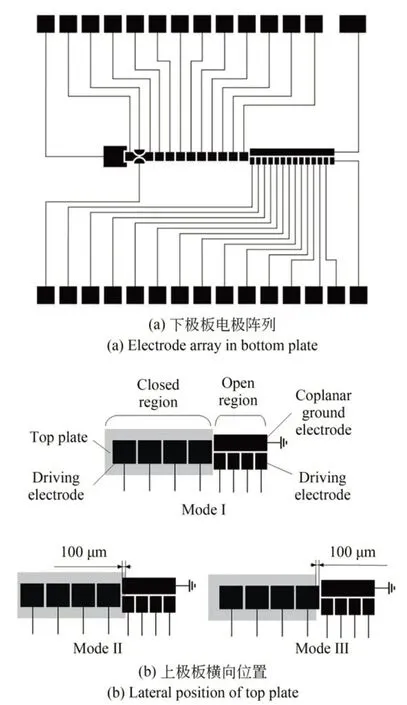
图2 芯片结构示意图Fig.2 Schematic diagram of chip configuration
3.2 芯片的制作
数字微流控芯片传统微加工工艺成本高昂造成相关研究及实验成本过高,而柔性印刷电子技术的快速发展为数字微流控芯片的低成本制作指明了方向。柔性数字微流控芯片制作工艺简单,成本低廉,而且易于实现曲面芯片结构上的液滴操作[22],为可穿戴、可弯曲数字微流控芯片的研究提供了可能。
文中后续实验所采用的芯片均是利用我们最近研发的数字微流控快速成型技术[22]来制作的。通过矢量绘图软件绘制出电极图,用微电子电路打印机在PET基材、Canon光面相纸和绒面相纸三种柔性基底上喷墨打印纳米银导电墨水以形成电极层。之后将基底置于鼓风式电热恒温干燥箱中烧结固化,再用双面胶带将其固定在玻璃载片上,以保证基底的平整性并固定下极板。PMP食品保鲜膜作为介电层,将其裁剪成所需尺寸。用一次性滴管在保鲜膜上淋涂Teflon®AF-1600溶液以形成疏水层,之后将保鲜膜加热以固化疏水层。为确保保鲜膜与电极阵列之间紧密贴合而不产生气泡,先在电极阵列和基底上涂上一层薄薄的硅油,然后将保鲜膜拉紧并用双面胶带将其粘在玻璃片上,直到没有褶皱为止。上极板则是一个铟锡氧化物(ITO)玻璃片,将其浸泡在Teflon®AF-1600疏水溶液中数分钟,这样便可在ITO玻璃片侧面涂上一层疏水材料,之后将其加热固化以形成疏水层。上极板侧面的疏水处理不仅有利于液滴从封闭区向开放区运动时脱离上极板侧面,也有利于反向的液滴运动,当液滴在运动到两区边界处时尽可能地抑制了其在上极板侧面的铺展,并产生更多的推力将其推入封闭区两极板之间。此时,一旦封闭区驱动电极被激活,液滴就可以被快速拉入封闭区。
4 液滴两区操控实验及讨论
考虑到微量进样器对液滴体积的控制误差及液滴蒸发等其他因素造成的误差,在各种情况下的液滴两区运动实验都进行了10次。
4.1 液滴在三种不同柔性基底芯片上的两区运动
在上极板ITO玻璃片的厚度为1 mm且其横向位置为模式Ⅰ的条件下,通过介电湿润驱动方式开展在PET基材、Canon光面相纸以及绒面相纸三种不同柔性基底的混合式结构芯片上的液滴两区运动实验。
在实际应用中,不论液滴初始位置在哪个区,通常都要在初始所在区内运动并完成一定操作后再进入另一个区,所以实验中,液滴都是在初始区域沿电极阵列运动一定距离后才进入另一区域。
根据前面的力平衡分析可知,理论上液滴从封闭区到开放区所需电压应该低于反向运动电压,但由于上极板侧面的亲水作用使液滴在由封闭区向开放区运动时难以脱离上极板的粘附作用。当上极板未做疏水处理时,实验中发现当驱动电压不够高时,液滴虽已进入开放区,但只能贴着上极板侧面边缘不停的抖动。疏水处理之后,发现该方向运动的驱动电压得以降低,但仍然要高于反向运动所需电压。不论柔性基底如何,液滴在所制作的柔性芯片上都可实现两区之间的自由往返运动,如图3~5所示。不同柔性基底芯片上液滴两区运动的主要区别在于驱动相同体积液滴的电压大小略有不同,这主要是由柔性基底的表面粗糙度造成的。
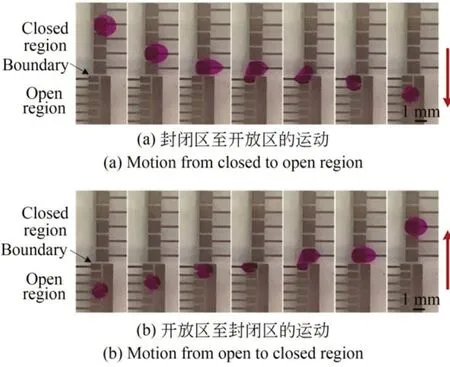
图3 PET基底芯片中的液滴两区运动Fig.3 Droplet two-region motion in PET-based chip

图4 Canon光面相纸基底芯片中的液滴两区运动Fig.4 Droplet two-region motion in Canon glossy photo paper-based chip
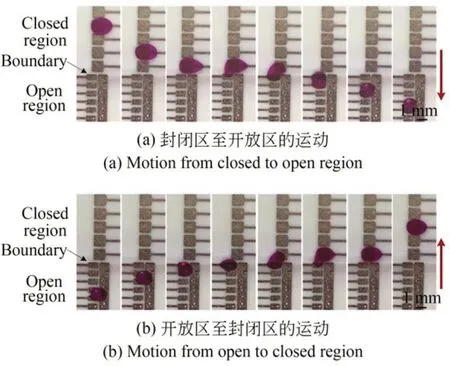
图5 绒面相纸基底芯片中的液滴两区运动Fig.5 Droplet two-region motion in matte photo paperbased chip
下面以PET基底芯片为例,研究封闭区上极板位置及厚度对液滴两区运动的影响。
4.2 上极板位置对液滴两区运动的影响
上极板在封闭区单排布局的驱动电极阵列上方平行布置,其位置对液滴两区运动的影响主要分为两个方面:(1)上极板纵向位置(即上下极板间距)的影响;(2)上极板横向位置(即图2(b)中三种位置模式)的影响。
4.2.1 上极板纵向位置的影响
对于液滴两区运动,当封闭区极板间距过大时,驱动压力过小,就会阻碍液滴由封闭区到开放区的运动;反之,当间距过小时,反向运动也是不可能的,只有向系统输入较大的能量时才能实现从开放区到封闭区的运动[16]。因此,在封闭区上下极板之间存在一个合适的间距范围,在这个范围内液滴两区间的自由往返运动都是可行的。这个间距范围与液滴体积、驱动电极尺寸等多个参数相关。通过大量实验证明,在如3.1中所设计的电极尺寸的基础上,对于0.8~1.2μL的液滴来说,在PET基底的柔性数字微流控芯片上,该间距范围约为150~350μm。
4.2.2 上极板横向位置的影响
在模式I下的液滴两区运动如图3所示。图6显示了液滴在模式Ⅱ和Ⅲ下的两区运动。模式I和Ⅱ都可以实现液滴两区间的自由往返运动,但是前者的驱动电压比后者要高一些;而模式Ⅲ只能实现液滴的单向运动。
在模式Ⅱ下,封闭区的上极板不仅在封闭区充当接地电极,在开放区入口处也可以起到部分接地电极的作用。因为有一小部分上极板位于开放区第一个驱动电极的上方,所以这部分上极板便与开放区共面接地电极一起充当开放区接地电极的角色,这样能很好地触发滴液从一个区域跨越两区边界运动到另一个区域。因此,模式Ⅱ下的液滴两区运动更容易实现,且驱动电压更低一些。图6右图是对应于图6(a4)和图6(b4)的液滴跨区运动正面图,此时液滴正处于两区边界,部分位于封闭区,部分位于开放区。在模式Ⅲ中,液滴只能从开放区运动到封闭区,反向运动无法实现。这主要是因为当液滴从开放区运动到两区边界时,虽然大部分液滴是在开放区铺展开的,但仍有小部分液滴能够铺展扩散到封闭区的第一驱动电极上;此时,开放区的共面接地电极可以起到封闭区接地电极的作用,使液滴跨越边界,接触到封闭区上极板,然后被封闭区第一个驱动电极所施加的电湿润力拉入到封闭区两极板之间,如图6(c)所示。但是反向运动时,液滴不能被拉出上极板所覆盖的空间,更不可能越过边界移动或铺展扩散到开放区。因此,在模式Ⅲ下,液滴只能实现两区之间的单向运动。
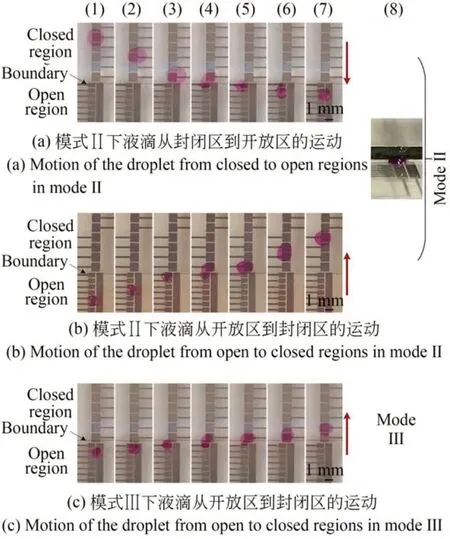
图6 液滴在模式Ⅱ和模式Ⅲ下的两区运动Fig.6 Two-region motion of droplets in mode II and mode III
通过上述分析可知,模式Ⅱ更容易实现液滴的两区运动。为了更进一步验证该模式的优越性,图7显示了上极板三种横向位置下液滴从一个区域进入另一区域的最低驱动电压,其中从封闭区进入开放区的电压仅表示将液滴从封闭区拉入开放区的最低电压,并不表示脱离上极板的电压,而且此方向的电压仅有模式I和Ⅱ对应的数值,因为模式Ⅲ该方向的运动无法实现。从图7可以看出,不论是封闭区向开放区还是反向运动,上极板横向位置模式Ⅱ下,液滴的最低驱动电压都是最小的。因此,模式Ⅱ的混合式结构形式更适合于实际应用,既能实现液滴两区间的自由往返运动,又能降低驱动电压。

图7 上极板三种横向位置下的液滴最低驱动电压对比Fig.7 Minimum droplet driving voltages in the three lateral positions of the top plate
4.3 上极板厚度对液滴两区运动的影响
由式(5)可知,上极板ITO玻璃片的厚度t对液滴从封闭区脱离上极板侧面完全进入开放区的运动是有很大影响的,而且厚度越大,ITO玻璃片侧面对液滴的粘附作用越大,液滴越不容易脱离其侧面。为了深入研究ITO玻璃片侧面被疏水化之后其厚度对液滴两区运动的影响,选择四种不同的ITO玻璃片厚度,分别为0.5 mm,1.1 mm,1.5 mm和2 mm,且在上极板横向位置为模式Ⅱ的情况下开展液滴在两区间的往返运动实验。
图6中的液滴两区运动是在ITO玻璃片厚度为1.1 mm情况下完成的。图8(a)、8(c)、8(e)分别给出了在另外三种不同ITO玻璃片厚度(0.5 mm、1.5 mm和2 mm)下液滴从封闭区到开放区的运动过程。将驱动电压按照一定的次序适时地施加到封闭区电极上,初始位于封闭区的液滴便在介电湿润的作用下向两区边界处移动。当液滴到达边界时,无论上极板多厚,液滴都能在较短的时间内跨越边界并完全进入开放区。但驱动电压不够大时,液滴无法完全摆脱上极板侧面对其的粘附作用。图8右图对应于不同ITO玻璃片厚度下液滴跨越两区边界时的正面图。液滴在两区间的反向运动(即开放区向封闭区)如图8(b)、8(d)、8(f)所示。依次激活开放区和封闭区的驱动电极便可顺利将液滴从开放区拉入封闭区。如果液滴体积适当的话,当其来到两区边界时,只需激活封闭区的第一个驱动电极,就可将液滴完全拉入封闭区,之后再依次激活封闭区后续驱动电极,便可完成液滴在封闭区的相关操作,如图8(b),8(d)所示。若液滴体积略大,激活封闭区第一个驱动电极,虽然可以将其拉入封闭区,但实验中发现,在部分液滴已经完全覆盖了封闭区第一个驱动电极的情况下,仍有部分液滴遗留在开放区而无法进入封闭区。因此,在这种情况下需要同时激活第二个驱动电极,才能将液滴完全拉入封闭区,如图8(f)所示。在实际应用中,应根据实际液滴大小,适时调整驱动电极激活策略以保证液滴在两区之间的自由往返运动。
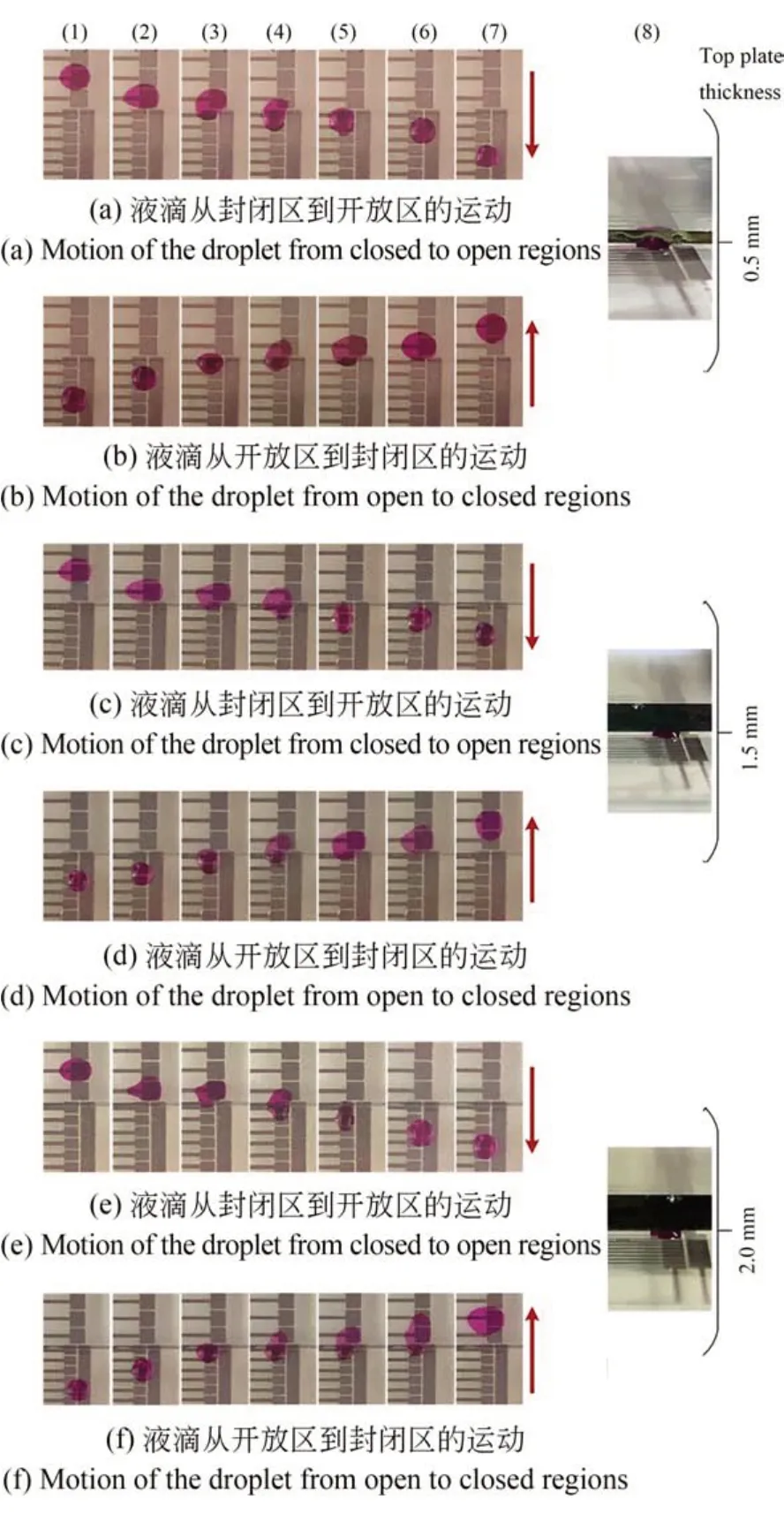
图8 不同上极板厚度下的液滴两区运动Fig.8 Droplet two-zone motion under the different thickness of the top plate
图9给出了相同体积的液滴在两区之间运动的最低驱动电压。图中从封闭区到开放区的最低驱动电压是指液滴从封闭区运动跨越两区边界并彻底脱离上极板时所对应的电压值。
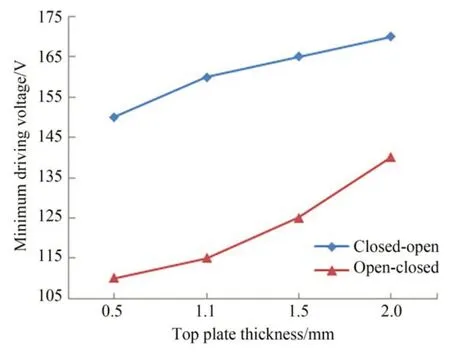
图9 最低驱动电压与上极板厚度的关系Fig.9 Relationship between minimum driving voltage and the thickness of top plate
实验发现,ITO玻璃片侧面疏水化之后,对于1.1 mm厚度的上极板来说,液滴从封闭区到开放区并脱离上极板侧面的驱动电压为160 Vrms,与文献[21]中厚度1.12 mm且未做疏水处理的上极板所对应的驱动电压300 Vrms相比,降低了将近一半。随着ITO玻璃片厚度的增加,液滴在两区之间往返运动的驱动电压有所增大,但即使是2.0 mm厚的上极板,其驱动电压也明显低于文献[21]中的300 Vrms电压。实验结果证明,上极板侧面的疏水化处理及其厚度的减小可大大降低液滴两区运动的驱动电压,这与通过液滴两区运动力平衡分析理论模型所得到的结果相符
另外,如果不考虑液滴在开放区的输运操作,当其处于两区边界并接触到上极板侧面时,对于厚度较薄的上极板,如0.5 mm和1.1 mm,低于110 Vrms(开放区液滴输运操作的驱动电压)的电压也可以将液滴从开放区完全拉入封闭区。因此,为了有效降低液滴驱动电压,应尽可能使用较薄的上极板,以便轻松实现液滴在两区之间的自由往返运动。
5 结 论
本文将数字微流控芯片的两种结构加以融合,在一个柔性基底上制作出混合式芯片,并对液滴在封闭区和开放区之间的往返运动进行了深入的分析研究,主要得到了以下几方面的结论:
(1)根据力平衡分析法分析了液滴在两区边界的运动特性,推出液滴跨越边界的条件,并得到实现两区运动的优化措施,即上极板侧面疏水化处理,增大液滴与侧面的接触角α,适当增加开放区三相接触线的有效长度b,并减小上极板厚度t。
(2)分析了封闭区上极板的空间位置对液滴两区运动的影响。横向位置模式Ⅱ的优势明显,更易于实现液滴的自由跨区往返运动,而且能够降低液滴驱动电压;纵向上,对于0.8~1.2μL的液滴来说,PET基底芯片上封闭区极板间距控制在150~350μm的范围内,可实现液滴的双向跨区运动。
(3)上极板侧面的疏水化处理大大降低了液滴两区运动的驱动电压;随着上极板厚度的增大,驱动电压有所增大。因此,薄的上极板有利于液滴两区间的自由往返运动。
猜你喜欢
石油管材与仪器(2020年5期)2020-11-05 02:36:06
高校化学工程学报(2020年2期)2020-06-10 08:53:26
原子能科学技术(2020年1期)2020-03-30 08:39:02
中学生数理化·高二版(2016年10期)2016-12-24 11:26:42
锻压装备与制造技术(2016年3期)2016-06-05 09:36:12
电源技术(2015年9期)2015-06-05 09:36:06
河南科技(2013年10期)2013-08-12 05:55:10
中国石油大学学报(自然科学版)(2010年5期)2010-01-04 00:53:22