
广义马尔科夫跳变系统的事件触发异步故障检测滤波
2022-03-31 00:36张志涵戴菲菲朱凤增
计算机测量与控制 2022年3期
张志涵,戴菲菲,朱凤增,彭 力,3
(1.江南大学 物联网应用技术教育部工程中心,江苏 无锡 214122; 2.台州市产品质量安全检测研究院,浙江 台州 240610;3.无锡太湖学院 江苏省物联网应用技术重点建设实验室,江苏 无锡 214064)
0 引言
马尔科夫跳变系统作为一种可以模拟结构或参数发生突然变化的特殊随机混合系统,在过去几十年里受到广泛关注,其应用涵盖了网络控制系统、经济系统、电力系统等多个领域[1-2]。 相比于传统的马尔科夫跳变系统,广义马尔科夫跳变系统是一种更为复杂的混杂动态系统,可以更精确地描述系统动态特性。 对离散广义马尔科夫跳变系统进行分析时,需要考虑系统的正则性、因果性、稳定性,目前,针对广义马尔科夫跳变系统的研究也越来越多[3-5]。 例如,文献[3]针对一类Markov跳变参数的离散广义系统,在转移概率部分未知的情况下,研究了系统稳定性与镇定控制问题;文献[4]研究了具有时变时滞的非线性不确定离散广义马尔科夫跳变系统的H∞滤波问题;文献[5]研究了具有执行器饱和的离散广义马尔科夫跳变系统的H∞控制问题。
随着现代工业的不断发展,人们对被控制系统的安全性和可靠性越来越重视。 文献[6]从提升系统可靠性的角度出发,借助Markov过程模型,针对系统的可靠性进行量化分析。 在这种情况下,针对系统在运行过程中可能发生的故障,及时有效地进行检测,对保证系统安全、可靠地运行有重要意义,所以故障检测技术得到了很大关注。 但由于实际系统的内部结构复杂,参数变化随机性强,因此对马尔科夫跳变系统这一随机混合系统的故障检测问题也得到了很多关注。 文献[7]采用T-S模糊方法研究了非齐次马尔科夫跳变系统的故障检测滤波问题;文献[8]中研究了具有时变时滞和参数不确定性的广义马尔科夫跳变系统的故障检测滤波问题;文献[9]针对部分转移概率未知的广义马尔科夫跳变系统,设计了一种故障检测观测器,此观测器不仅对故障敏感,而且对干扰具有鲁棒性。
滤波或估计是通过量测值重构系统的状态向量,它以“预测-实测-修正”的顺序递推,根据系统的量测信息,剔除随机干扰信息,再现系统的状态,或根据系统的测量值从被“污染”的系统中估计系统的实际面目。滤波技术在众多应用领域中都发挥着重要作用,如信号处理、目标跟踪和图像处理等,文献[10]就研究了鲁棒边缘粒子滤波算法,并在平面跟踪模型中进行了仿真验证。在针对马尔科夫跳变系统的故障检测研究中,故障检测滤波器是指采用解析模型的方法,设计一个基于滤波器的故障检测方案,通过滤波器的滤波功能估计离散广义马尔科夫跳变系统的状态值,得到残差信号,也就是说将以滤波器为基础的故障检测问题最终转化成了H∞滤波问题,然后在此基础上构造一个与残差信号相关的评价函数以及阈值,通过评价函数与阈值的比较来判断故障是否已经发生,系统是否会产生故障警报,最终实现对系统的故障检测功能。
现有的针对马尔科夫跳变系统的研究成果中,通常假设控制器或滤波器可以精确获得系统模态信息。 然而,在实际工业应用中,由于有限的物理装置存在识别系统模态不及时、传输丢包等现象,导致这种假设在实际中很难实现。 为了克服模态依赖控制器或滤波器的缺点,一种解决方案是设计模态独立的控制器或滤波器[11-12]。 显然,在模态独立的设计方法中,系统模态信息即使是可用的,也被完全忽略了,因此模态独立的设计方法并不是处理系统模态与滤波器模态之间复杂异步现象的最佳选择,该方法具有一定程度的保守性。 为了解决这一问题,一种新的滤波器方法,即异步滤波器引起了越来越多的关注[13-15]。 例如,文献[13]设计了一种异步滤波器,研究了具有传感器非线性的马尔科夫跳变系统的l2-l∞滤波问题;文献[14]中为时变时滞马尔科夫跳变系统设计了一种异步H∞状态反馈控制器;文献[15]研究了衰落信道下非线性马尔科夫跳变系统在频域内的异步故障检测问题。
在一些通信带宽有限的网络化系统中,采用事件触发机制可以有效地节约通信资源。 与时间触发机制相比,事件触发机制仅在满足事件触发条件时才会传输信号,在保证系统稳定的前提下,有效地降低了系统资源消耗,已经引起了人们广泛关注[16-17]。 文献[16]研究了事件触发机制下的离散马尔科夫跳变系统的故障检测滤波问题;文献[17]中研究了具有事件触发通信机制的离散时变系统的分布式滤波问题。
因此,本文研究了具有事件触发机制的广义马尔科夫跳变系统的异步故障检测滤波问题。 考虑了系统模态和滤波器模态之间的异步现象,使用两种不同的马尔科夫链分别代表系统模态和滤波器模态,提出了一种异步故障检测滤波器设计方法,这种方法可以充分利用系统的模态信息,比模态独立的故障检测滤波器设计方法的保守性小;引入了事件触发机制,与时间触发机制相比,减少了数据传输量,降低了网络上的通信负担;以线性矩阵不等式的形式给出了使残差误差系统正则、因果和随机稳定的且满足H∞性能的充分条件。 最后通过一个仿真例子说明该方法的有效性并对比分析了在不同的事件触发阈值参数下的性能情况。
1 故障检测滤波器的算法描述
在固定概率空间下,考虑如下离散广义马尔科夫跳变系统模型:

(1)
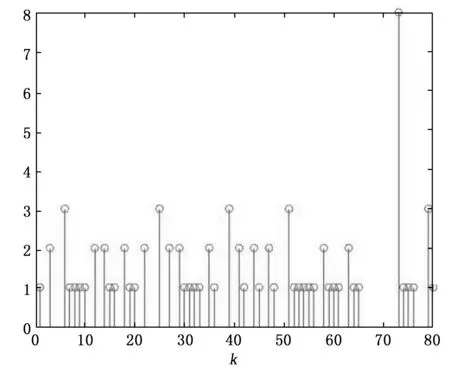
其中:x(k)∈Rn为系统状态,ω(k)∈Rl为外部干扰输入向量,f(k)∈Rq为被检测的故障向量,设ω(k)和f(k)均为l2范数有界向量,y(k)∈Rp为系统测量输出向量,矩阵E∈Rn×n为奇异矩阵,并满足rank(E)=r 为了降低通信负担,节约有限的通信资源,引入如下的事件触发机制: g(k)=εΤ(k)ε(k)-σyΤ(k)y(k) (2) 其中:ε(k)=y(ku)-y(k),k表示当前时刻,ku表示在当前时刻之前最新的事件触发时刻,u标记为传输时刻。 注1:系统测量输出的最新数据只有当满足触发条件ku+1=min{k∈N|k>ku,g(k)>0}时才会发送到相应的故障检测滤波器。 与传统的时间触发机制相比,事件触发机制可以减少冗余信息的传输,通过事件触发阈值参数σ来平衡网络传输的通信负担,提高了资源利用率。 然后设计如下的异步故障检测滤波器: (3) 其中:xf(k)∈Rn为状态估计,r(k)∈Rp为故障检测滤波器的残差输出,Af(δ(k)),Bf(δ(k)),Cf(δ(k))为待确定的参数矩阵。 与系统模态θ(k)不同,滤波器中引入了新的随机变量δ(k)来描述滤波器模态。 注2:在实际系统中,模态依赖滤波器可能存在无法准确获得系统模态的缺点,为了克服这一缺点通常选择模态独立滤波器,但显然模态独立滤波器由于完全忽略了系统的模态信息,具有一定的保守性,且不能很好地解决系统模态与滤波器模态之间复杂的异步现象。 因此为了处理这一复杂的异步现象,在式(3)中引入了一种新的故障检测滤波器,即异步故障检测滤波器。 使用两个不同的马尔科夫链分别代表系统模态θ(k)和滤波器模态δ(k),这个滤波器模态与系统模态是异步的,但是与系统模态之间又存在一定的概率关系,δ(k)不仅与δ(k-1)有关,而且还与θ(k)有关,这意味着故障检测滤波器可以充分利用系统模态的信息。 与模态独立的故障检测滤波器相比,降低了保守性。 (4) 其中: 本文的目的是在考虑系统模态和滤波器模态异步的情况下,设计如式(3)所示的异步故障检测滤波器,对所有系统干扰输入,系统(4)是正则、因果、随机稳定的并且给定一个标量γ>0,使得残差误差re(k)满足如下的Η∞性能指标: (5) 在本小节的最后部分,介绍一下后续证明将用到的定义、引理及检测故障所用到的评价函数和阈值的公式。 定义1[18]:对于系统(4): 那么系统(4)是随机稳定的; ④如果系统(4)是正则,因果和随机稳定的,那么它是随机容许的。 本文选择评价函数和阈值分别如下: (6) 其中:k0表示初始评价时刻,S表示选择的时间窗宽度。 从评价函数和阈值的公式中可以看出:评价函数是由残差信号r(k)所构造的,用来评估所设计的故障检测滤波器的检测效果,阈值则为不存在故障时的评价函数的最大值。 且时间窗宽度S越大,代表需要累加计算的残差数据越多,所需要的故障检测判断的时间就越长,而采用较小的时间窗宽度,代表了所需要的故障检测判断的时间较短,故障检测灵敏度更高。 通过式(7)所示的故障判断规则检测系统是否发生故障,当评价函数的数值高于阈值时,系统是存在故障的,发出警报,当评价函数的数值小于或者等于阈值时,系统则没有故障,正常工作: (7) 引理1[19]:如果存在矩阵A,R=RΤ以及Q>0使得AΤQA-R<0,那么存在一个矩阵G使得: (8) 本节将通过定理1给出系统(4)是正则、因果和随机稳定并且满足Η∞性能指标的充分条件。 (9) 证明:首先证明系统(4)是正则和因果的。 构造非奇异矩阵M和N为以下形式: 其中:H是具有适当维数的非奇异矩阵。 经过简单的计算容易得到不等式: (10) ΔV={V(k+1)|V(k)}-V(k)= 之后通过进一步的计算就可以得到: 因此: (11) 显然,利用Schur引理,式(9)中隐含Λip<0。 因此,我们可以得到: (12) 也就是说,在式(12)的两边同时累加,且满足趋于∞时,可以得到不等式: (13) 定义性能函数为: (14) 由简单计算可以得到: (15) 利用Schur引理,式(9)等于Ψip,因此Ψip<0,满足成立,即系统(4)具有Η∞性能。 以上推导得到了系统(4)是正则、因果、随机稳定并满足Η∞性能的充分条件,定理1证明完毕。 上一节证明了系统(4)是正则、因果、随机稳定和满足式(5)所示的Η∞性能指标的,并给出了详细的分析过程。 基于上述分析,本小节将针对广义马尔科夫跳变系统,主要研究事件触发基础下的异步故障检测滤波器的设计问题。 <0 (16) Ξ33=Ξ44=Ξ96=Ξ99=Ξ1010=-I,Ξ55=Ξ66=-γ2I, 那么系统(4)是随机容许且稳定的,并且具有Η∞性能,且期望的故障检测滤波器的参数可以表示为: (17) (18) 接下来定义: 用T及其转置分别左乘和右乘式(18)的左边和右边,并定义满足下式: 通过计算可以得到: 之后利用线性变换经过简单的计算,即可解出期望的故障检测滤波器参数,如式(17)所示。 定理2证明完毕。 注4:使用MATLAB中的LMI工具仿真可以得到所期望的异步故障检测滤波器,式(6)给出了阈值和通过残差构造的评价函数的计算方法,通过式(7)所示的故障判断规则,比较评价函数和阈值之间的大小情况,就可以判断出系统是否发生了故障。 在很多实际应用中,性能指标γ是一个系统的重要指标,为了获得最小Η∞性能指标γ,线性矩阵不等式(16)可以转化为如下凸优化问题的求解。 s.t. 式(16). 根据上述分析,本节将通过一组参数矩阵,利用MATLAB仿真,证明所提出的广义马尔科夫跳变系统的事件触发异步故障检测滤波器的有效性并对其性能进行分析。 针对广义马尔科夫跳变系统(1),其选取的参数矩阵如下所示: 假设广义马尔科夫跳变系统(1)包含两个系统模态,相应的马尔科夫链θ(k)的状态转移概率矩阵为: 以及假设所设计的异步故障检测滤波器(3)有三个模态,则其马尔科夫链δ(k)的状态转移概率矩阵为[13]: 即当θ(k)为模态1时,异步故障检测滤波器的状态转移概率符合矩阵Γ1中的概率情况,当θ(k)为模态2时,异步故障检测滤波器的状态转移概率符合矩阵Γ2中的概率情况。 假设初始时间k0=0,时间宽度S=80,如图1所示,选取系统的干扰输入ω(k)为幅值小于0.2的随机信号,故障信号f(k)的模型如下,只在20≤k≤40时有数据,其余时刻则为零,也就是说假设系统只在20≤k≤40时存在故障,其余时刻则没有故障,即: 图1 外部干扰ω(k) 选取事件触发阈值参数σ=0.3,利用MATLAB的LMI工具箱可以得到所设计的异步故障检测滤波器参数矩阵如下: 图2为事件触发阈值参数σ=0.3时的系统输出释放时间和释放时间间隔,可以看出在事件触发机制的作用下,系统的数据传输率仅有62.5%,与时间触发机制相比,系统只在满足事件触发机制条件(2)时才会传输数据,这大大降低了系统的通信负担,节约了通信资源。 图3为故障检测滤波器的残差信号r(k),从图中可以明显看到,当20≤k≤40即故障信号f(k)存在时,残差信号r(k)的曲线发生了明显的变化,远远高于没有故障信号存在时的情况,当k≤20或k≥40即故障信号为0时,残差信号r(k)的曲线趋于平稳。 图2 事件触发释放时间和时间间隔的关系图 图3 残差信号r(k) 图4为残差评价函数J(r,k)的曲线,分别用实线表示系统无故障时的情况以及用虚线表示系统有故障时的情况。 图4 残差评价函数J(r,k) 上述证明了本文所设计的故障检测滤波器的有效性,下面给出当选取不同的事件触发阈值参数σ时,对滤波器的性能影响、数据传输率变化以及相应的故障检测时间的影响,如表1所示。 表1 不同σ值下的参数值 表1的结果表明,σ值越大,则γ值越大,数据传输率会降低,相应的故障检测时间越长。 与时间触发机制相比,事件触发机制的数据传输量要低于时间触发机制的数据传输量,随着事件触发阈值参数σ的增大,数据传输率会逐渐降低,对故障检测的灵敏度产生一定的影响,也就是说若选取的参数σ过小,则结果会类似于时间触发方案,不能很好地节约网络资源,但如果选取的参数σ过大,可能会由于数据传输少而导致影响滤波性能,延长检测到故障所需的时间。因此,事件触发阈值参数过大或者过小,都有可能导致系统变得不稳定,利用事件触发机制降低数据传输量和通信负担的前提是要保持系统稳定性和保证检测故障所需时间,保证系统可以稳定运行。 表2 不同σ值下两种故障检测滤波器的γ值对比 本文研究了基于事件触发机制的离散时间广义马尔科夫跳变系统的异步故障检测滤波问题。 为了解决系统模态与滤波器模态之间的异步现象,使用两个不同的马尔科夫链分别代表系统模态和滤波器模态,设计了一个异步的故障检测滤波器。 然后引入了事件触发机制以减少通信负担,节约通信资源。 以线性矩阵不等式的形式给出了滤波器存在的充分条件,所设计的滤波器能够使残差误差系统是正则、因果、随机稳定的并且满足Η∞性能。 最后通过仿真例子证明了所设计的异步故障检测滤波器是有效的。








2 故障检测滤波器的性能分析









3 故障检测滤波器的设计



4 仿真设计与分析








5 结束语
猜你喜欢
心理学报(2022年9期)2022-09-06
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
客联(2022年4期)2022-07-06
心理学报(2022年4期)2022-04-12
科学导报·学术(2020年43期)2020-10-29
计算机应用(2016年10期)2017-05-12
智能计算机与应用(2016年1期)2016-03-02
科技与创新(2015年19期)2015-10-14
科技经济市场(2014年2期)2014-06-20
